





目 录
1 前 言 1
1.1 课题研究背景意义 1
1.2 国内外研究现状 2
2 六自由度电动并联机器人结构设计的结构及工作原理 6
2.1 并联运动机构概述 6
2.2 机械手总体结构原理 7
2.3六自由度电动并联机器人结构设计的总体结构 8
2.4 控制系统结构及工作原理 9
2.5 夹持机构工作空间的分析 10
2.6三维空间分析原理 12
2.7 臂部结构设计的基本要求 16
3 六自由度电动并联机器人结构设计主要部件的设计 19
3.1 电动机选型 19
3.2电机的分类 19
3.3选择步进电机的计算 20
3.4传动结构形式的选择 23
3.5 轴承的寿命校核 25
3.6 手爪夹持器结构设计与校核 27
3.6.1手爪夹持器种类 27
3.6.2夹持器设计计算 28
3.7 夹持装置气缸设计计算 29
3.7.1 初步确系统压力 29
3.7.2气缸计算 30
3.7.3 活塞杆的计算校核 32
3.7.4 气缸工作行程的确定 33
3.7.5 活塞的设计 33
3.7.6 导向套的设计与计算 33
3.7.7 端盖和缸底的计算校核 34
3.7.8 缸体长度的确定 35
3.7.9 缓冲装置的设计 35
3.8 气压元件选取及工作原理 35
3.8.1 气源装置 35
3.8.2 执行元件 36
3.8.3 控制元件 36
3.8.4 辅助元件 38
3.8.5 真空发生器 38
4 夹持机构机夹持机构空间分析 39
4.1夹持机构夹持机构机的运动学约束 39
4.1.1 连杆杆长约束 39
4.1.2 运动副转角约束 39
4.1.3 连杆杆间干涉 40
4.2 确定夹持机构空间的基本方法 40
总 结 41
参 考 文 献 42
致 谢 43
2.3六自由度电动并联机器人结构设计的总体结构
六自由度电动并联机器人结构设计的组成及各部分关系概述:
它主要由机械系统(执行系统、驱动系统)、控制检测系统及智能系统组成。
(1) 执行系统:执行系统是六自由度电动并联机器人结构设计完成关节工件,实现各种运动所必需
的机械部件,它包括手部、腕部、机身等。
(a) 末端执行器:机械手为了进行作业而配置的操作机构,直接喷漆工件。
(b) 腕部:又称手腕,是连接手部和臂部的部件,其作用是调整或改变末端执行器的工作方位。
© 臂部:联接机座和手部的部分,是支承腕部的部件,作用是承受工件的管理管理荷重,改变手部的空间位置,满足机械手的作业空间,将各种载荷传递到机座。
(d) 机身:机械手的基础部分,起支撑作用,是支撑手臂的部件,其作用是带动臂部自转、升降或俯仰运动。
(2) 驱动系统:为执行系统各部件提供动力,并驱动其动力的装置。常用的有
机械传动、机电传动、气压传动和电传动。
(3) 控制系统:通过对驱动系统的控制,使执行系统按照规定的要求进行工作,当发生错误或故障时发出报警信号。
(4) 检测系统:作用是通过各种检测装置、传感装置检测执行机构的运动情况,根据需 要反馈给控制系统,与设定进行比较,以保证运动符合要求。 实践证明,六自由度电动并联机器人结构设计可以代替人手的繁重劳动,显著减轻工人的劳动强度,改善劳动条件,提高劳动生产率和自动化水平。工业生产中经常出现的笨重工件的搬运和长期频繁、单调的操作,采用机械手是有效的。此外,它能在高温、低温、深水、宇宙、放射性和其他有毒、污染环境条件下进行操作,更显示其优越性,有着广阔的发展前途[4-8]。
2.4 控制系统结构及工作原理
夹持机构夹持机构机的控制与夹持机构系统结构示意图如图2-2所示:
由图可以看出来,该夹持机构夹持机构机的控制与夹持机构系统主要由三个基本单元组成,它们是:PC处理器单元,伺服电机控制单元和夹持机构数据采集与存储单元。PC处理单元主要完成数据处理、数据显示、几何尺寸计算和三维形体的重建等,同时还负责向其他两个单元发送控制指令,以便协调整个系统的工作。伺服电机控制单元则主要是依据PC计算机所发送的控制指令对三个伺服电机的运行状态进行控制,从而确保他们按实际要求正常运转。夹持机构数据采集与存储单元主要用于完成对三个线性刻度尺(例如光栅尺、激光干涉仪等)输出的脉冲信号进行记数,并将计数结果存储到对应的三个存储器中,以便于PC计算机进行读取。
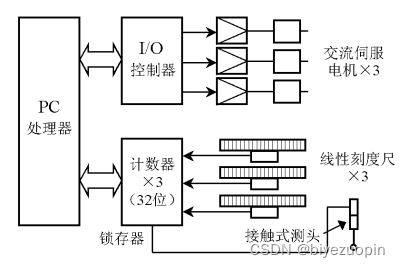
图2.2 控制与夹持机构系统框图
上述控制与夹持机构系统的工作原理可简述如下:
当操作人员通过计算机键盘(或其他键控开关)向计算机发出控制命令后,PC处理器则通过I/O控制器接口向三个交流伺服电机分别发出相应的运行控制指令。当三个伺服电机接受到正确的指令信息后,即驱动各自的滚珠丝杠进行旋转,从而带动相应的移动副按实际要求进行伸缩,使测头向目标点移动;同时,随着移动副的伸缩,与之相连的线性长度记录仪(如光栅尺等)开始输出计数脉冲,并由三个32位的计数器分别进行计数。若测头移动过程中,连杆或运动副出现干涉现象,则驱动系统将立即向计算机反馈信息,以便通知计算机及时调整三个伺服电机的运行状态,及时修正测头的运行轨迹,从而确保测头安全、柔性地到达夹持机构点位置。
当测头与被测目标点接触的一刹那,测头的微动开关将产生一触发脉冲,并将其反馈给PC计算机作为采样触发信号。PC计算机接收到该采样指令后,则向32位计数器发出读数指令,随后便将计数器中的三个脉冲计数值读入处理器,经相应处理软件计算后,得到该夹持机构点处的实际空间坐标值,从而完成一次坐标采样过程。












六自由度电动并联机器人结构设计

于 2022-11-10 10:44:45 首次发布


















 484
484

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











