







旋转矩阵的变换:
对于旋转矩阵转化,先来解决坐标变换的表示。先从二维平面OXY坐标系讲起:当OXY逆时针旋转α度时,同一矢量R在不同坐标下的表示:
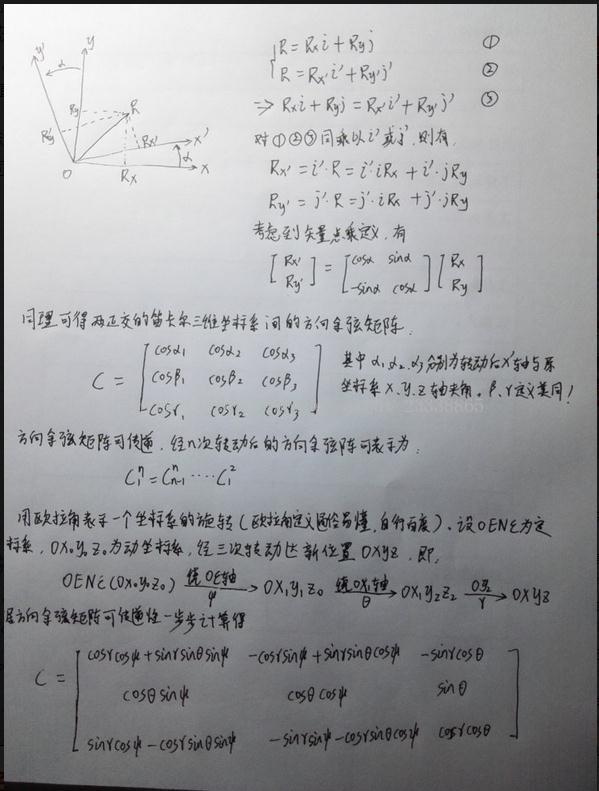
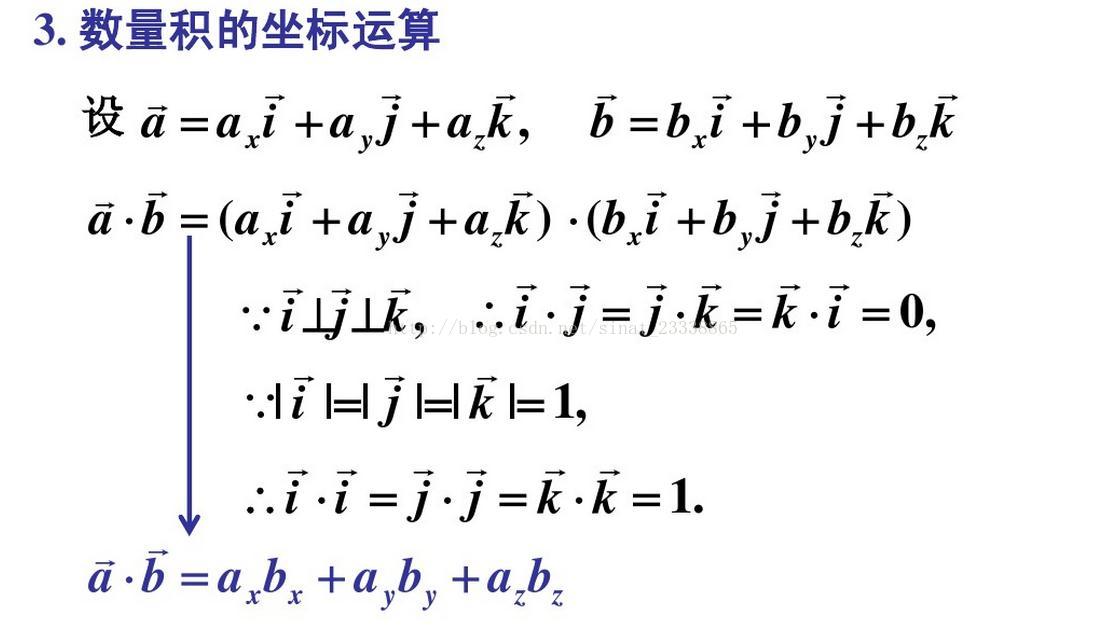
这里涉及向量的基础知识 补充如下并简单计算:

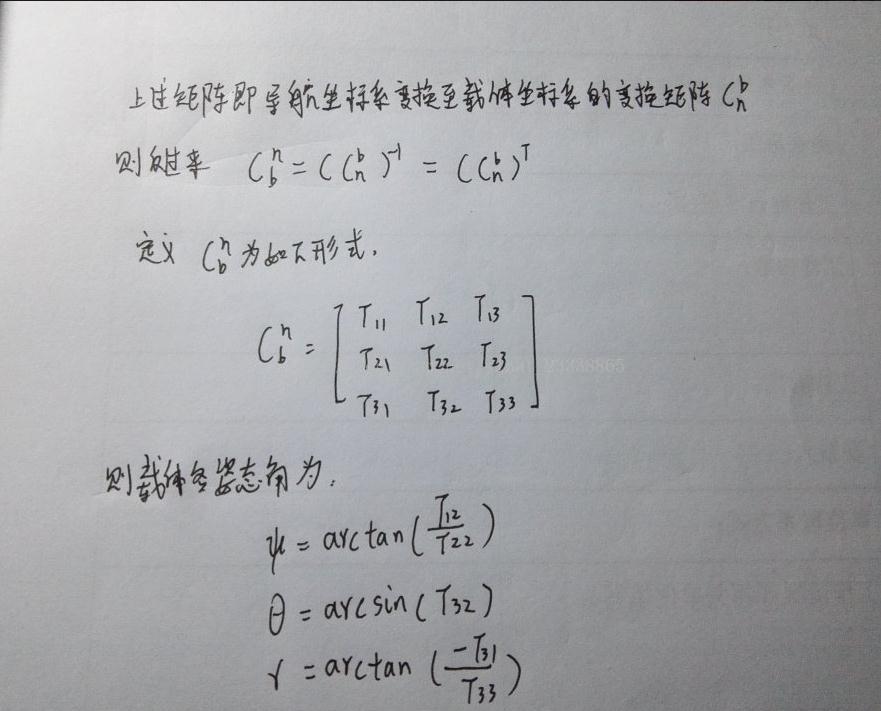
根据方向余弦矩阵我们可以得到欧拉角:
姿态解算的原理:
姿态解算常用的算法有欧拉角法、方向余弦法和四元数法。 欧拉角法在求解姿态时存在奇点(万向节死锁),不能用于全姿态的解算; 方向余弦可用于全姿态的解算但计算量大,不能满足实时性要求。 四元数法,其计算量小,无奇点且可以满足飞行器运动过程中姿态的实时解算。
姿态解算的原理:对于一个确定的向量,用不同的坐标系表示时,他们所表示的大小和方向一定是相同的。但是由于这两个坐标系的旋转矩阵存在误差,那么当一个向量经过这么一个有误差存在的旋转矩阵后,在另一个坐标系中肯定和理论值是有偏差的,我们通过这个偏差来修正这个旋转矩阵。这个旋转矩阵的元素是四元数,我们修正的就是四元数,这样姿态就被修正了。
四元数旋转矩阵证明过程:
共轭四元数即实数部分相同,矢量部分相反q*表示q的共轭四元数;
四元数的范数定义为四个元素的平方和,且范数为1时称为规范化的四元数。
假定某矢量绕通过O点的某轴逆时针转动一个角度θ,则与该矢量固连的动坐标系和参考坐标系间的变换四元数为:
q=cos(θ/2)+sin(θ/2)cosα i+ sin(θ/2)cosβj+ sin(θ/2)cosγ k
通常称其为四元数的三角形式,也称特征四元数,其范数为1,在导航应用中一般所应用的四元数均为特征四元数。其标量部分cos(θ/2)表示了转角一半的余弦值,矢量部分则体现了转动轴的方向,α、β、γ是转动轴与参考坐标系各轴间的夹角。
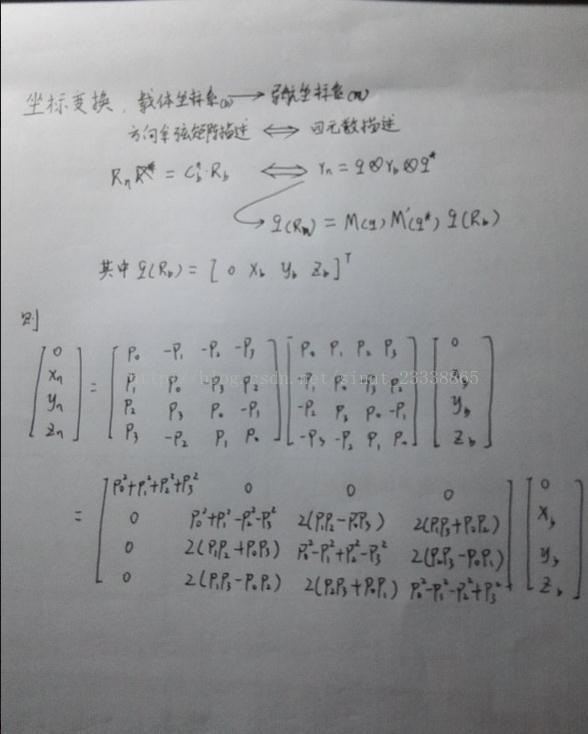
旋转矢量坐标变换的四元数描述为:r’=qrq*或r=q*r’q

四元数对坐标变换:
整个姿态解算的过程如下:















 2万+
2万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









