








该文作者为林雪平大学的Martin大神,发表于ICCV15,即对滤波器进行时域上正则处理的相关滤波方法,对滤波器进行显式的正则也是该文的主要贡献,可以有效的抑制背景区域的响应,从而可以扩大搜索区域,在大范围运动,复杂背景等场景下获得更佳的性能,该文也是后来CCOT和ECO的基础,因此要想理解后面这些论文首先要弄懂SRDCF的原理(SRDCF的基础是MOSSE和KCF这是相关滤波的两篇最基础的文章,网上有很多介绍,这里就不赘述了)。
- 主要原理及思路

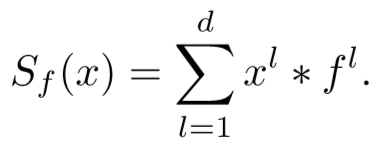
首先看文中的基础公式(4),这里f为滤波器模板(m×n×d),角标l即为第l个通道,w为对滤波器加的正则系数矩阵(m×n),形状如图,这样做的目的是很显然的,在目标处正则系数较低,在背景处正则系数较高,这是希望使得到的滤波器能够更多的关注目标信息,在背景处的滤波响应结果尽量低,这就是正则的作用,需要注意的能够设计处这样的正则形状是
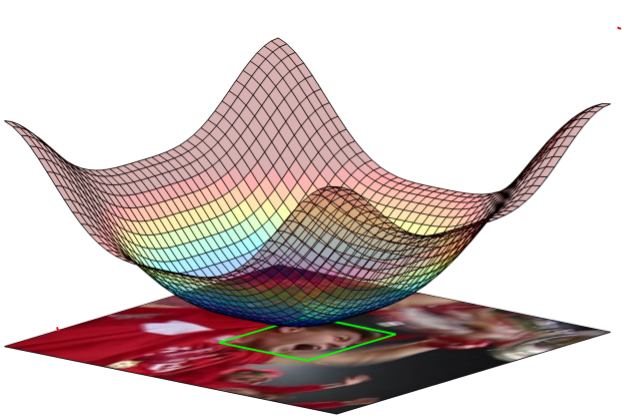
有条件的,即必须使用线性操作,即f和样本x是直接对应点相乘再求和的,即线性相关操作(文中和所有相关滤波方法一样使用了循环样本,这样就能通过卷积操作快速算出所有循环样本的响应,其本质仍然是相关操作)。
由于是线性相关操作,所以在时域空间上能够直观的构造出这样的正则系数矩阵,如果使用的是非线性求响应的方法,即在对偶空间上使用非线性核,即
2.目标函数优化求解
理解了这个目标函数下面我们就需要对这个函数进行求解了,这个求解过程也是SRDCF最难的地方,这也是Martin厉害的地方。首先使用帕斯瓦尔定理将目标函数变换到频域,需

要注意帕斯瓦尔定理在点乘变换到卷积的时候需要除以一个系数,反之则不用。
然后将参数向量化,这是为了简化求解过程:

其中粗体表示一维向量,D为对角化操作,C为循环化操作,几个参数的维度分别为D(x^)(mn×mn),f^l(mn×1),yk^(mn×1),C(w^)(mn×mn),f^l(mn×1),k代表第k个样本。通过循环操作可以去掉卷积的符号,因为卷积的本质是移位相乘相加。
由于f,x,y都是实数构成的所以它们的傅里叶变换是共轭对称的,这里作者考虑利用这个
性质对求解过程进行加速,因为傅里叶变换后包括实部和虚部两个数,如果我们能够将两个数合并为一个实数,又保持两个矩阵相乘的结果不变的话,那么我们求解的速度至少快一倍,这里作者利用了共轭对称性。
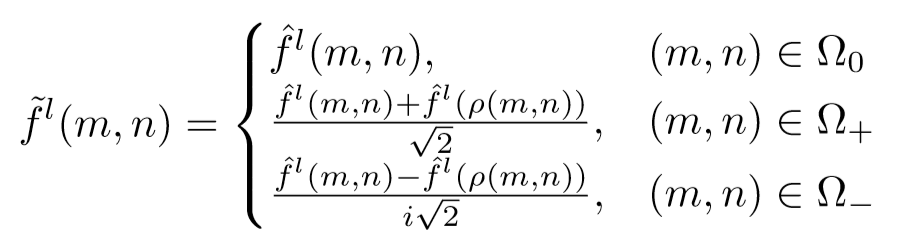
这里以f为例,将属于零频,正频,负频域部分的点分别操作,将包含实部和虚部的矩阵转换为了纯实数矩阵,这样设计可以保证乘积的结果不变,从而保证不改变求解结果。而这样操作对于相同大小的矩阵来说可以通过左乘同一个变化矩阵B实现,这个矩阵必定是稀疏的而且是酉矩阵,因为每一行最多只对原数据的两个点进行操作,其它都是零。通过一些变

化操作之后为如上形式:
然后再通过向量化和块对角化操作将对通道的求和符号去掉得到更加简洁的形式如下:

这里的D和W都变成了(dmn×dmn)的大小,对这样一个凸函数对f求导得到f的极值即目标,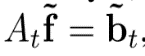
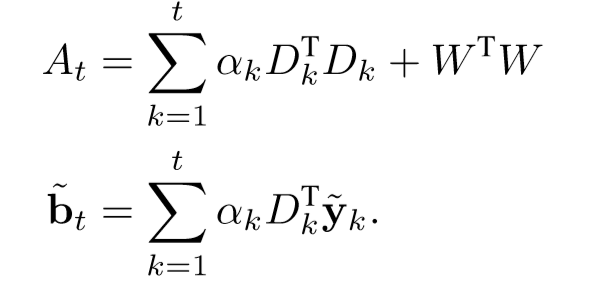
为了避免对A求逆,这里使用了高斯塞尔德迭代的方法求解,利用了正则矩阵在频域的稀疏性,和实数化矩阵B的稀疏性使得求解能在较少的迭代次数内到达一个收敛值。注意这里使用了t个样本,即整个跟踪框架是利用了历史样本的,这样能够保证一定的记忆性,A和b的更新方法和论文CN2中如出一辙,可以减少更新时的计算量。论文重要的部分已经介绍完了,尺度检测使用了SAMF金字塔方法。
最后定位的部分,由于使用HOG特征导致样本的分辨率降低了,即一个位置对应原图的4*4的像素区域,这样固然计算更快但是如果直接将最后响应最大值的相对响应中心的偏移量(这里一定是整数)乘4作为最终偏移量则会导致定位精度有一定偏差,所以作者将最后得到的响应map先进行插值,类似离散傅里叶变换,将离散的map变成连续map,然后利用牛顿迭代法找到响应最大的点,这个点可能是个浮点数,因为是连续的map,那么算出的浮点数的偏移量乘4得到最终的偏移量就会更加准确了。最后附上响应结果示例图,明显可以看到加了正则系数矩阵后得到的响应在背景处的值得到了明显的抑制,从而可以扩大搜索域进行大范围的跟踪。















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









