






将上一个系统调用函数和asm版本的实现整合进入menu的内核中:
-
int
GetPid() -
{
-
int pid = getpid(); -
printf("The Current Progress pid is : % d\n",pid); -
return 0; -
}
-
-
int
GetPidAsm() -
{
-
int pid; -
asm volatile( -
"mov $0,%% ebx\n\t" -
"mov $0x14,%% eax\n\t" -
"int $0x80\n\t" -
"mov %% eax,% 0\n\t" -
: "=m" (pid) -
); -
printf("The Current Progress pid asm is : % d\n",pid); -
return 0; -
}
-
int
main() -
{
-
PrintMenuOS(); -
SetPrompt("MenuOS>>"); -
MenuConfig("version","MenuOS V1.0(Based on Linux 3.18.6)",NULL); -
MenuConfig("quit","Quit from MenuOS",Quit); -
MenuConfig("time","Show System Time",Time); -
MenuConfig("time-asm","Show System Time(asm)",TimeAsm); -
MenuConfig("getpid","Show Current Progress id",GetPid); -
MenuConfig("getpid-asm","Show Current Progress asm id",GetPidAsm); -
ExecuteMenu(); -
}
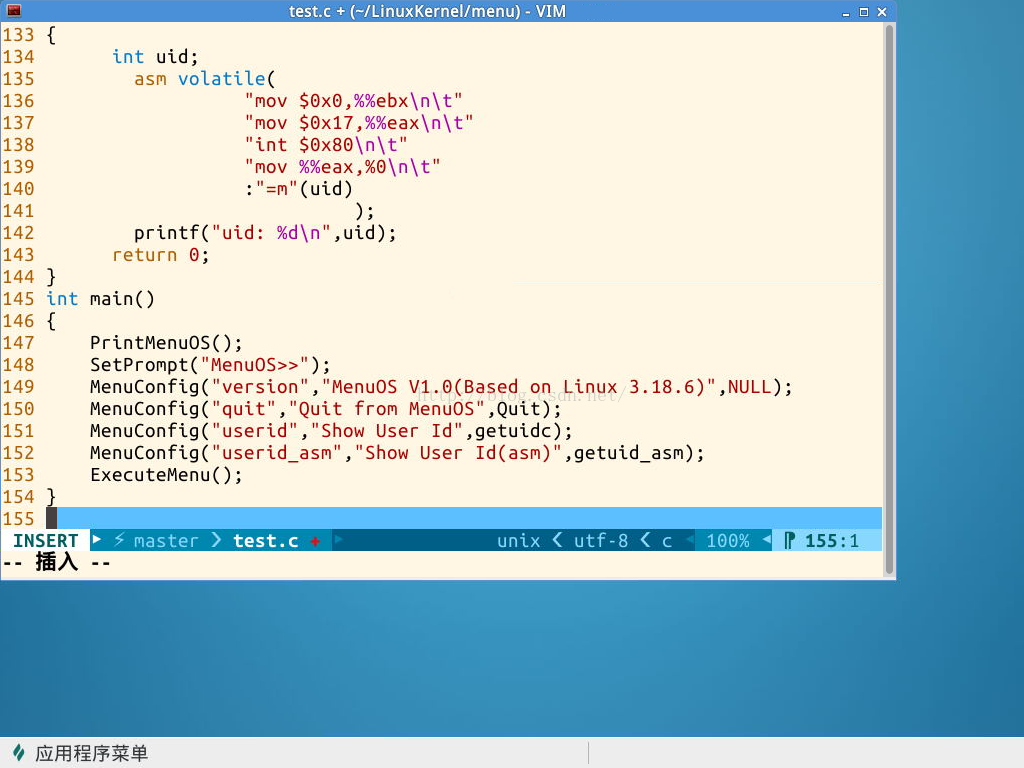
上面的一段代码,MenuConfig这个函数是菜单(也就是制作出来的内核)的初始化配置函数,第一个参数是命令,第二个参数是该命令的描述,第三个参数是这个命令相对应的handler,也就是回调函数,是通过一个函数指针进行实现的。ExecuteMenu这个函数是为了启动这个menu引擎,其实是一个循环等待用户输入命令的过程。
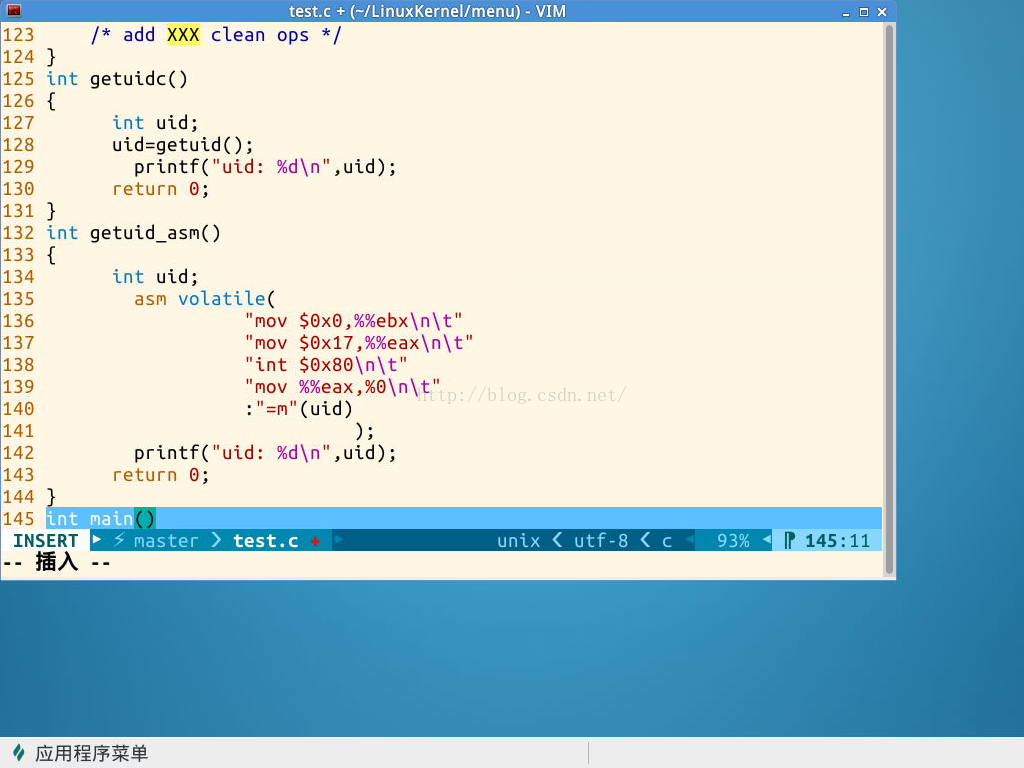
将上周写的两个函数分别命名为int getuidc() int getuid_asm,将这两个函数写入test.c文件中:
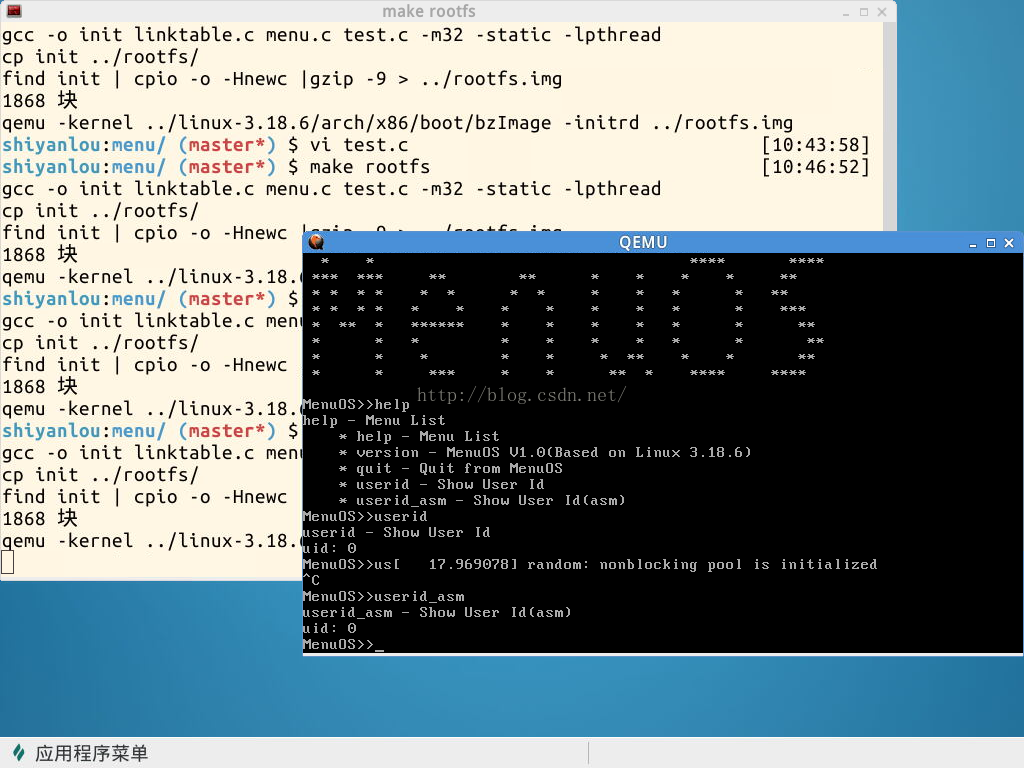
通过make rootfs脚本命令运行一下,可以看出通过userid命令和userid_asm命令都可以获取程序的用户id:
下面,详细分析一下menu操作系统通过user命令和user_asm命令对系统内核服务的调用。在操作系统启动过程中,首先对系统调用进行初始化,系统调用实质上是一种中断,是通过\int\main.c \start_kernel文件中的trap_int()函数声明的,trap_int()函数指向\arch\x86\kernel\traps.c文件中的set_system_trap_gate(SYSCALL_VECTOR,&system_call)函数,在这一过程中,通过参数SYS_CALL传递系统调用中断向量,&system_call是汇编代码入口。在本例的menu操作系统中,中断向量int 0x80指向系统调用system_call:
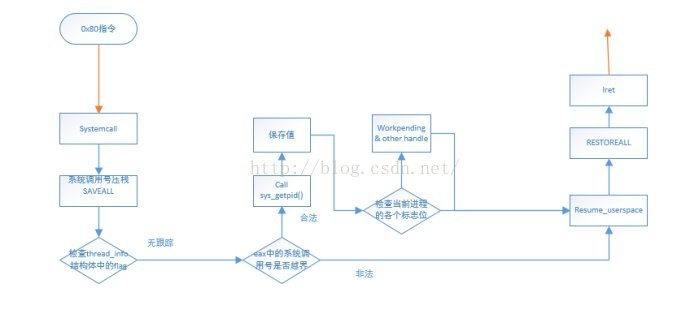
在如上流程中,system_exit:是系统调用结束前的进程切换模块,其代码如下:
testl $_TIF_WORK_SYSCALL_EXIT, %ecx jz work_pending TRACE_IRQS_ON ENABLE_INTERRUPTS(CLBR_ANY) # could let syscall_trace_leave() call # schedule() instead movl %esp, %eax call syscall_trace_leave jmp resume_userspace END(syscall_exit_work)
系统调用完成后,通过汇编命令iret返回主程序,至此,系统调用实现任务并返回。
总之,系统调用作为一种中断处理过程,能够反映出一般的中断处理机制,对于一般的中断处理,同样是由四个主要步骤完成的,首先进入中断,保护好现场,第二步调用中断的服务程序,第三步,完成中断退出前的进程切换工作,第四步,返回主程序并恢复现场















 792
792











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









