







 这篇博客详细介绍了斯坦福机器狗的组装过程,包括视频教程、图示说明和实践练习。内容涵盖了四足机器人的结构组件,如主控、舵机扩展板、稳压版和电池的安装。此外,还深入讲解了无刷舵机、普通舵机、数字舵机与模拟舵机的区别,强调了数字舵机的性能优势。最后提到了PCA9685如何通过IIC协议控制多个舵机,并对四足机器人领域的几个知名企业产品进行了比较分析。
这篇博客详细介绍了斯坦福机器狗的组装过程,包括视频教程、图示说明和实践练习。内容涵盖了四足机器人的结构组件,如主控、舵机扩展板、稳压版和电池的安装。此外,还深入讲解了无刷舵机、普通舵机、数字舵机与模拟舵机的区别,强调了数字舵机的性能优势。最后提到了PCA9685如何通过IIC协议控制多个舵机,并对四足机器人领域的几个知名企业产品进行了比较分析。
四足机器人的组装全过程
视频教程:
http://online.edu.senlanit.com/playback/playback?cid=a0844796-d979-4dd9-9f63-a44f505793df&vid=cae40e0c-db19-451b-8e0b-d55b2684aa1f&v=1111111111
进去以后搜索:斯坦福机器狗的设计与实现(黄老师)的第二课。
图示教程:
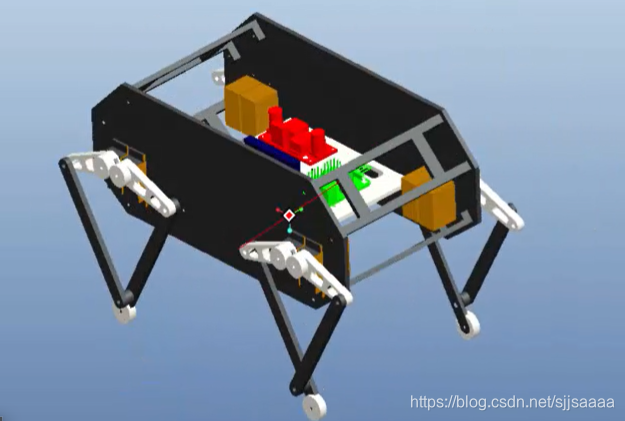
三维图:
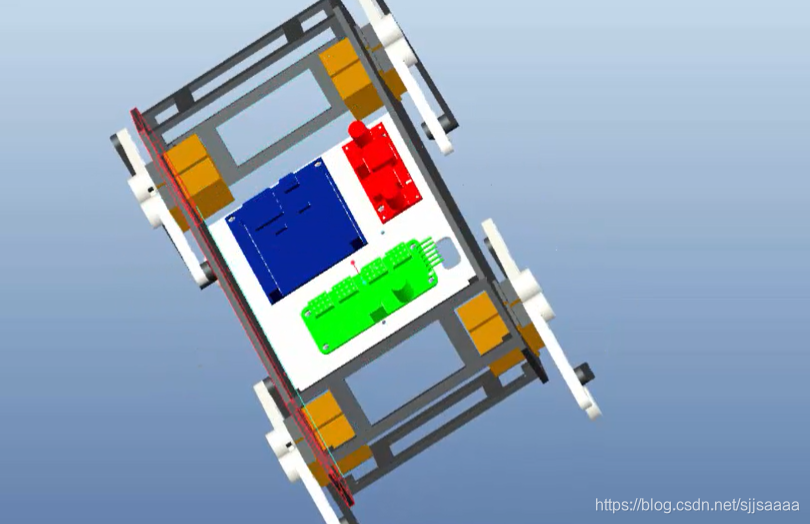
蓝色:主控
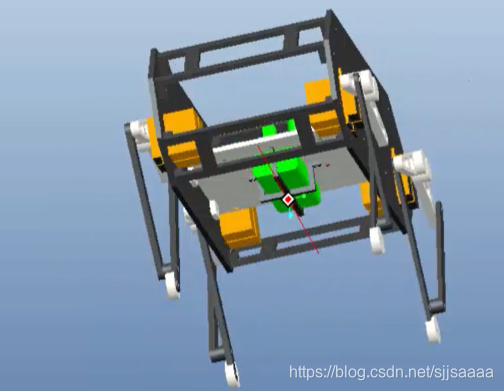
绿色:舵机扩展板
红色:稳压版
下面绿色的为:电池
具体安装如下:
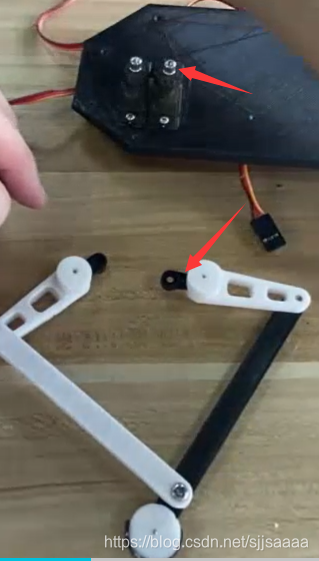
腿部完整形态:

腿部零件:
安装腿时注意左右对称。

组装完腿之后安装舵机:
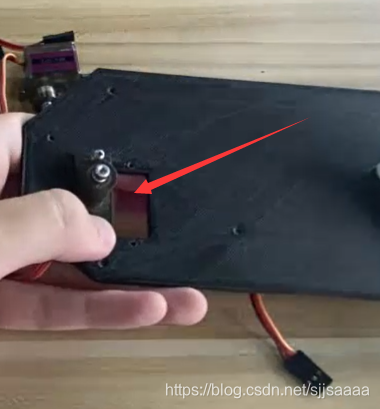
组装好的腿插入舵机带的刀片:

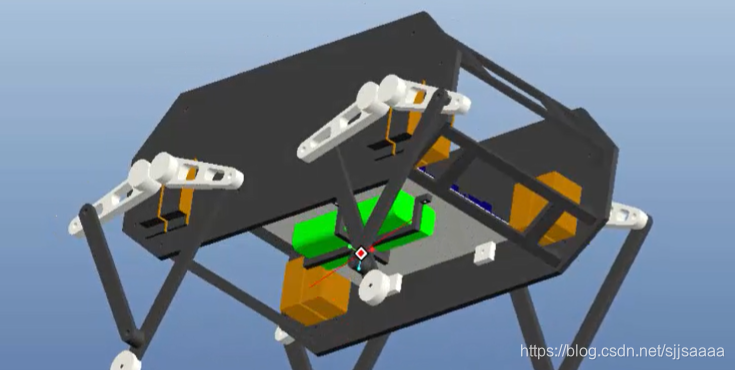
将电路电板固定在四条腿中间:
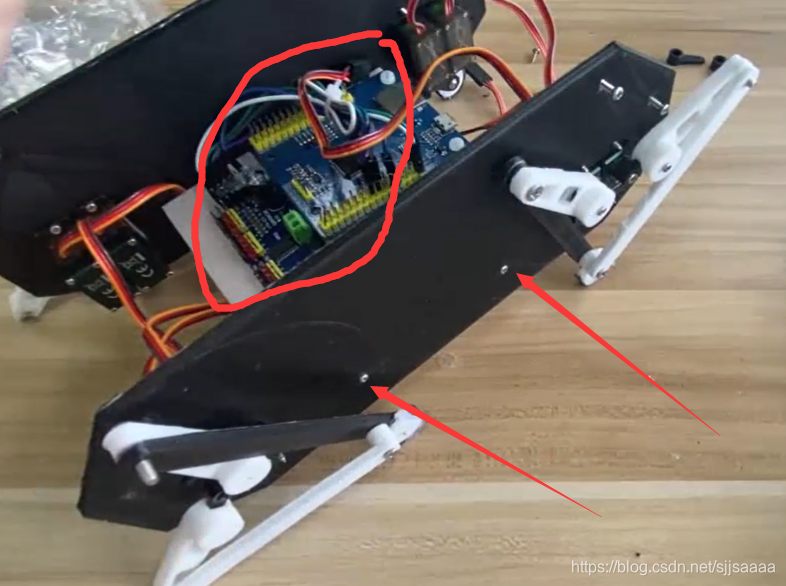
需要安装四个固定板,上俩个是粗的,下两个是细的。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











