







/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* <h2><center>© Copyright (c) 2021 STMicroelectronics.
* All rights reserved.</center></h2>
*
* This software component is licensed by ST under BSD 3-Clause license,
* the "License"; You may not use this file except in compliance with the
* License. You may obtain a copy of the License at:
* opensource.org/licenses/BSD-3-Clause
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "delay.h"
#include "bsp_printf.h"
#include "bsp_key.h"
#include "string.h"
#include "bsp_sdram.h"
#include "bsp_malloc.h"
#include "bsp_sdmmc.h"
#include "ff.h" /* Obtains integer types */
//#include "bsp_w25qxx.h"
//#include "bsp_ftl.h"
//#include "bsp_nand.h"
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
SD_HandleTypeDef hsd1;
DMA_HandleTypeDef hdma_sdmmc1_rx;
DMA_HandleTypeDef hdma_sdmmc1_tx;
UART_HandleTypeDef huart1;
SDRAM_HandleTypeDef hsdram1;
/* USER CODE BEGIN PV */
volatile uint8_t rx_done, tx_done;
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_USART1_UART_Init(void);
static void MX_FMC_Init(void);
static void MX_DMA_Init(void);
static void MX_SDMMC1_SD_Init(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
static void Sdram_SendCommand(uint32_t CommandMode, uint32_t CommandTarget, uint32_t AutoRefreshNumber, uint32_t ModeRegisterDefinition)
{
FMC_SDRAM_CommandTypeDef Command;
Command.AutoRefreshNumber = AutoRefreshNumber;
Command.CommandMode = CommandMode;
Command.CommandTarget = CommandTarget;
Command.ModeRegisterDefinition = ModeRegisterDefinition;
HAL_SDRAM_SendCommand(&hsdram1, &Command, 0);
}
static void Sdram_Init_Sequence(void)
{
uint32_t ModeRegisterDefinition;
Sdram_SendCommand(FMC_SDRAM_CMD_CLK_ENABLE, FMC_SDRAM_CMD_TARGET_BANK1, 1, 0);//时钟配置使能
delay_us(500);//至少延时200us
Sdram_SendCommand(FMC_SDRAM_CMD_PALL, FMC_SDRAM_CMD_TARGET_BANK1, 1, 0);//对所有存储区预充电
Sdram_SendCommand(FMC_SDRAM_CMD_AUTOREFRESH_MODE, FMC_SDRAM_CMD_TARGET_BANK1, 8, 0);//设置自刷新次数
//
#define SDRAM_MODEREG_BURST_LENGTH_1 ((uint16_t)0x0000)
#define SDRAM_MODEREG_BURST_LENGTH_2 ((uint16_t)0x0001)
#define SDRAM_MODEREG_BURST_LENGTH_4 ((uint16_t)0x0002)
#define SDRAM_MODEREG_BURST_LENGTH_8 ((uint16_t)0x0004)
#define SDRAM_MODEREG_BURST_TYPE_SEQUENTIAL ((uint16_t)0x0000)
#define SDRAM_MODEREG_BURST_TYPE_INTERLEAVED ((uint16_t)0x0008)
#define SDRAM_MODEREG_CAS_LATENCY_2 ((uint16_t)0x0020)
#define SDRAM_MODEREG_CAS_LATENCY_3 ((uint16_t)0x0030)
#define SDRAM_MODEREG_OPERATING_MODE_STANDARD ((uint16_t)0x0000)
#define SDRAM_MODEREG_WRITEBURST_MODE_PROGRAMMED ((uint16_t)0x0000)
#define SDRAM_MODEREG_WRITEBURST_MODE_SINGLE ((uint16_t)0x0200)
ModeRegisterDefinition=(uint32_t)SDRAM_MODEREG_BURST_LENGTH_1 | //设置突发长度:1(可以是1/2/4/8)
SDRAM_MODEREG_BURST_TYPE_SEQUENTIAL | //设置突发类型:连续(可以是连续/交错)
SDRAM_MODEREG_CAS_LATENCY_3 | //设置CAS值:3(可以是2/3)
SDRAM_MODEREG_OPERATING_MODE_STANDARD | //设置操作模式:0,标准模式
SDRAM_MODEREG_WRITEBURST_MODE_SINGLE; //设置突发写模式:1,单点访问
Sdram_SendCommand(FMC_SDRAM_CMD_LOAD_MODE, FMC_SDRAM_CMD_TARGET_BANK1, 1, ModeRegisterDefinition);
HAL_SDRAM_ProgramRefreshRate(&hsdram1, 823);
}
//通过串口打印SD卡相关信息
void show_sdcard_info(void)
{
HAL_SD_CardCIDTypeDef cid;
switch(hsd1.SdCard.CardVersion)
{
case CARD_V1_X:printf("Card Version:CARD_V1_X\r\n");break;
case CARD_V2_X:printf("Card Version:CARD_V2_X\r\n");break;
}
switch(hsd1.SdCard.CardType)
{
case CARD_SDSC:printf("Card Type:CARD_SDSC\r\n");break;
case CARD_SDHC_SDXC:printf("Card Type:CARD_SDHC_SDXC\r\n");break;
case CARD_SECURED:printf("Card Type:CARD_SECURED\r\n");break;
}
if(HAL_OK != HAL_SD_GetCardCID(&hsd1, &cid))
{
Error_Handler();
}
printf("Card ManufacturerID:%d\r\n",cid.ManufacturerID); //制造商ID
printf("Card RCA:%d\r\n",hsd1.SdCard.RelCardAdd ); //卡相对地址
printf("Card Capacity:%d MB\r\n",(uint32_t)(((uint64_t)hsd1.SdCard.BlockNbr*hsd1.SdCard.BlockSize)>>20)); //显示容量
printf("Card BlockSize:%d\r\n\r\n",hsd1.SdCard.BlockSize); //显示块大小
printf("Card LogBlockNbr:%d\r\n\r\n",hsd1.SdCard.LogBlockNbr);
printf("Card LogBlockSize:%d\r\n\r\n",hsd1.SdCard.LogBlockSize);
}
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_USART1_UART_Init();
MX_FMC_Init();
MX_DMA_Init();
MX_SDMMC1_SD_Init();
/* USER CODE BEGIN 2 */
#define DATA_SIZE 10000
#define DATA_ADDR 380
delay_init(216);
delay_ms(5000);
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_1, GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_0, GPIO_PIN_RESET);
Sdram_Init_Sequence();
uint8_t key;
uint8_t *buf;
uint32_t sd_size;
uint32_t i;
show_sdcard_info(); //打印SD卡相关信息
while (1)
{
key=KEY_Scan(0);
if(key==KEY0_PRES)//KEY0按下了
{
buf=mymalloc(SRAMIN,512); //申请内存
if(SD_ReadDisk(buf,0,1)==0) //读取0扇区的内容
{
printf("USART1 Sending Data...\r\n");
printf("SECTOR 0 DATA:\r\n");
for(sd_size=0;sd_size<512;sd_size++)printf("%x ",buf[sd_size]);//打印0扇区数据
printf("\r\nDATA ENDED\r\n");
printf("USART1 Send Data Over!\r\n");
}
myfree(SRAMIN,buf);//释放内存
}
else if(key==KEY1_PRES)
{
buf=mymalloc(SRAMIN,512); //申请内存
for(i=0; i<512; i++)
{
buf[i] += 6;
}
if(0 == SD_WriteDisk(buf,0,1))
{
printf("\r\nwrite success!\r\n");
}
else
{
printf("\r\nwrite failed!\r\n");
}
myfree(SRAMIN,buf);//释放内存
}
delay_ms(10);
}
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
delay_ms(1000);
printf("hello world!\r\n");
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
RCC_PeriphCLKInitTypeDef PeriphClkInitStruct = {0};
/** Configure LSE Drive Capability
*/
HAL_PWR_EnableBkUpAccess();
/** Configure the main internal regulator output voltage
*/
__HAL_RCC_PWR_CLK_ENABLE();
__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE1);
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLM = 25;
RCC_OscInitStruct.PLL.PLLN = 432;
RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2;
RCC_OscInitStruct.PLL.PLLQ = 9;
RCC_OscInitStruct.PLL.PLLR = 2;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Activate the Over-Drive mode
*/
if (HAL_PWREx_EnableOverDrive() != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV4;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV2;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_7) != HAL_OK)
{
Error_Handler();
}
PeriphClkInitStruct.PeriphClockSelection = RCC_PERIPHCLK_USART1|RCC_PERIPHCLK_SDMMC1
|RCC_PERIPHCLK_CLK48;
PeriphClkInitStruct.Usart1ClockSelection = RCC_USART1CLKSOURCE_PCLK2;
PeriphClkInitStruct.Clk48ClockSelection = RCC_CLK48SOURCE_PLL;
PeriphClkInitStruct.Sdmmc1ClockSelection = RCC_SDMMC1CLKSOURCE_CLK48;
if (HAL_RCCEx_PeriphCLKConfig(&PeriphClkInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Enables the Clock Security System
*/
HAL_RCC_EnableCSS();
}
/**
* @brief SDMMC1 Initialization Function
* @param None
* @retval None
*/
static void MX_SDMMC1_SD_Init(void)
{
/* USER CODE BEGIN SDMMC1_Init 0 */
/* USER CODE END SDMMC1_Init 0 */
/* USER CODE BEGIN SDMMC1_Init 1 */
/* USER CODE END SDMMC1_Init 1 */
hsd1.Instance = SDMMC1;
hsd1.Init.ClockEdge = SDMMC_CLOCK_EDGE_RISING;
hsd1.Init.ClockBypass = SDMMC_CLOCK_BYPASS_DISABLE;
hsd1.Init.ClockPowerSave = SDMMC_CLOCK_POWER_SAVE_DISABLE;
hsd1.Init.BusWide = SDMMC_BUS_WIDE_1B;
hsd1.Init.HardwareFlowControl = SDMMC_HARDWARE_FLOW_CONTROL_DISABLE;
hsd1.Init.ClockDiv = 0;
if (HAL_SD_Init(&hsd1) != HAL_OK)
{
Error_Handler();
}
if (HAL_SD_ConfigWideBusOperation(&hsd1, SDMMC_BUS_WIDE_4B) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN SDMMC1_Init 2 */
/* USER CODE END SDMMC1_Init 2 */
}
/**
* @brief USART1 Initialization Function
* @param None
* @retval None
*/
static void MX_USART1_UART_Init(void)
{
/* USER CODE BEGIN USART1_Init 0 */
/* USER CODE END USART1_Init 0 */
/* USER CODE BEGIN USART1_Init 1 */
/* USER CODE END USART1_Init 1 */
huart1.Instance = USART1;
huart1.Init.BaudRate = 115200;
huart1.Init.WordLength = UART_WORDLENGTH_8B;
huart1.Init.StopBits = UART_STOPBITS_1;
huart1.Init.Parity = UART_PARITY_NONE;
huart1.Init.Mode = UART_MODE_TX_RX;
huart1.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart1.Init.OverSampling = UART_OVERSAMPLING_16;
huart1.Init.OneBitSampling = UART_ONE_BIT_SAMPLE_DISABLE;
huart1.AdvancedInit.AdvFeatureInit = UART_ADVFEATURE_NO_INIT;
if (HAL_UART_Init(&huart1) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN USART1_Init 2 */
/* USER CODE END USART1_Init 2 */
}
/**
* Enable DMA controller clock
*/
static void MX_DMA_Init(void)
{
/* DMA controller clock enable */
__HAL_RCC_DMA2_CLK_ENABLE();
/* DMA interrupt init */
/* DMA2_Stream3_IRQn interrupt configuration */
HAL_NVIC_SetPriority(DMA2_Stream3_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(DMA2_Stream3_IRQn);
/* DMA2_Stream6_IRQn interrupt configuration */
HAL_NVIC_SetPriority(DMA2_Stream6_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(DMA2_Stream6_IRQn);
}
/* FMC initialization function */
static void MX_FMC_Init(void)
{
/* USER CODE BEGIN FMC_Init 0 */
/* USER CODE END FMC_Init 0 */
FMC_SDRAM_TimingTypeDef SdramTiming = {0};
/* USER CODE BEGIN FMC_Init 1 */
/* USER CODE END FMC_Init 1 */
/** Perform the SDRAM1 memory initialization sequence
*/
hsdram1.Instance = FMC_SDRAM_DEVICE;
/* hsdram1.Init */
hsdram1.Init.SDBank = FMC_SDRAM_BANK1;
hsdram1.Init.ColumnBitsNumber = FMC_SDRAM_COLUMN_BITS_NUM_9;
hsdram1.Init.RowBitsNumber = FMC_SDRAM_ROW_BITS_NUM_13;
hsdram1.Init.MemoryDataWidth = FMC_SDRAM_MEM_BUS_WIDTH_16;
hsdram1.Init.InternalBankNumber = FMC_SDRAM_INTERN_BANKS_NUM_4;
hsdram1.Init.CASLatency = FMC_SDRAM_CAS_LATENCY_3;
hsdram1.Init.WriteProtection = FMC_SDRAM_WRITE_PROTECTION_DISABLE;
hsdram1.Init.SDClockPeriod = FMC_SDRAM_CLOCK_PERIOD_2;
hsdram1.Init.ReadBurst = FMC_SDRAM_RBURST_ENABLE;
hsdram1.Init.ReadPipeDelay = FMC_SDRAM_RPIPE_DELAY_0;
/* SdramTiming */
SdramTiming.LoadToActiveDelay = 2;
SdramTiming.ExitSelfRefreshDelay = 8;
SdramTiming.SelfRefreshTime = 4;
SdramTiming.RowCycleDelay = 7;
SdramTiming.WriteRecoveryTime = 3;
SdramTiming.RPDelay = 2;
SdramTiming.RCDDelay = 2;
if (HAL_SDRAM_Init(&hsdram1, &SdramTiming) != HAL_OK)
{
Error_Handler( );
}
/* USER CODE BEGIN FMC_Init 2 */
/* USER CODE END FMC_Init 2 */
}
/**
* @brief GPIO Initialization Function
* @param None
* @retval None
*/
static void MX_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
/* GPIO Ports Clock Enable */
__HAL_RCC_GPIOC_CLK_ENABLE();
__HAL_RCC_GPIOF_CLK_ENABLE();
__HAL_RCC_GPIOH_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
__HAL_RCC_GPIOB_CLK_ENABLE();
__HAL_RCC_GPIOG_CLK_ENABLE();
__HAL_RCC_GPIOE_CLK_ENABLE();
__HAL_RCC_GPIOD_CLK_ENABLE();
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_0|GPIO_PIN_1|GPIO_PIN_5, GPIO_PIN_RESET);
/*Configure GPIO pin : PC13 */
GPIO_InitStruct.Pin = GPIO_PIN_13;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_PULLUP;
HAL_GPIO_Init(GPIOC, &GPIO_InitStruct);
/*Configure GPIO pin : PF7 */
GPIO_InitStruct.Pin = GPIO_PIN_7;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH;
GPIO_InitStruct.Alternate = GPIO_AF9_QUADSPI;
HAL_GPIO_Init(GPIOF, &GPIO_InitStruct);
/*Configure GPIO pin : PA0 */
GPIO_InitStruct.Pin = GPIO_PIN_0;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_PULLDOWN;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
/*Configure GPIO pins : PH2 PH3 */
GPIO_InitStruct.Pin = GPIO_PIN_2|GPIO_PIN_3;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_PULLUP;
HAL_GPIO_Init(GPIOH, &GPIO_InitStruct);
/*Configure GPIO pins : PB0 PB5 */
GPIO_InitStruct.Pin = GPIO_PIN_0|GPIO_PIN_5;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
/*Configure GPIO pin : PB1 */
GPIO_InitStruct.Pin = GPIO_PIN_1;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_OD;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
/*Configure GPIO pin : PB2 */
GPIO_InitStruct.Pin = GPIO_PIN_2;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH;
GPIO_InitStruct.Alternate = GPIO_AF9_QUADSPI;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
/*Configure GPIO pin : PB6 */
GPIO_InitStruct.Pin = GPIO_PIN_6;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH;
GPIO_InitStruct.Alternate = GPIO_AF10_QUADSPI;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
/************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file stm32f7xx_it.c
* @brief Interrupt Service Routines.
******************************************************************************
* @attention
*
* <h2><center>© Copyright (c) 2021 STMicroelectronics.
* All rights reserved.</center></h2>
*
* This software component is licensed by ST under BSD 3-Clause license,
* the "License"; You may not use this file except in compliance with the
* License. You may obtain a copy of the License at:
* opensource.org/licenses/BSD-3-Clause
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "stm32f7xx_it.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "fifo.h"
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN TD */
/* USER CODE END TD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/* External variables --------------------------------------------------------*/
extern DMA_HandleTypeDef hdma_sdmmc1_rx;
extern DMA_HandleTypeDef hdma_sdmmc1_tx;
extern SD_HandleTypeDef hsd1;
/* USER CODE BEGIN EV */
/* USER CODE END EV */
/******************************************************************************/
/* Cortex-M7 Processor Interruption and Exception Handlers */
/******************************************************************************/
/**
* @brief This function handles Non maskable interrupt.
*/
void NMI_Handler(void)
{
/* USER CODE BEGIN NonMaskableInt_IRQn 0 */
/* USER CODE END NonMaskableInt_IRQn 0 */
HAL_RCC_NMI_IRQHandler();
/* USER CODE BEGIN NonMaskableInt_IRQn 1 */
while (1)
{
}
/* USER CODE END NonMaskableInt_IRQn 1 */
}
/**
* @brief This function handles Hard fault interrupt.
*/
void HardFault_Handler(void)
{
/* USER CODE BEGIN HardFault_IRQn 0 */
/* USER CODE END HardFault_IRQn 0 */
while (1)
{
/* USER CODE BEGIN W1_HardFault_IRQn 0 */
/* USER CODE END W1_HardFault_IRQn 0 */
}
}
/**
* @brief This function handles Memory management fault.
*/
void MemManage_Handler(void)
{
/* USER CODE BEGIN MemoryManagement_IRQn 0 */
/* USER CODE END MemoryManagement_IRQn 0 */
while (1)
{
/* USER CODE BEGIN W1_MemoryManagement_IRQn 0 */
/* USER CODE END W1_MemoryManagement_IRQn 0 */
}
}
/**
* @brief This function handles Pre-fetch fault, memory access fault.
*/
void BusFault_Handler(void)
{
/* USER CODE BEGIN BusFault_IRQn 0 */
/* USER CODE END BusFault_IRQn 0 */
while (1)
{
/* USER CODE BEGIN W1_BusFault_IRQn 0 */
/* USER CODE END W1_BusFault_IRQn 0 */
}
}
/**
* @brief This function handles Undefined instruction or illegal state.
*/
void UsageFault_Handler(void)
{
/* USER CODE BEGIN UsageFault_IRQn 0 */
/* USER CODE END UsageFault_IRQn 0 */
while (1)
{
/* USER CODE BEGIN W1_UsageFault_IRQn 0 */
/* USER CODE END W1_UsageFault_IRQn 0 */
}
}
/**
* @brief This function handles System service call via SWI instruction.
*/
void SVC_Handler(void)
{
/* USER CODE BEGIN SVCall_IRQn 0 */
/* USER CODE END SVCall_IRQn 0 */
/* USER CODE BEGIN SVCall_IRQn 1 */
/* USER CODE END SVCall_IRQn 1 */
}
/**
* @brief This function handles Debug monitor.
*/
void DebugMon_Handler(void)
{
/* USER CODE BEGIN DebugMonitor_IRQn 0 */
/* USER CODE END DebugMonitor_IRQn 0 */
/* USER CODE BEGIN DebugMonitor_IRQn 1 */
/* USER CODE END DebugMonitor_IRQn 1 */
}
/**
* @brief This function handles Pendable request for system service.
*/
void PendSV_Handler(void)
{
/* USER CODE BEGIN PendSV_IRQn 0 */
/* USER CODE END PendSV_IRQn 0 */
/* USER CODE BEGIN PendSV_IRQn 1 */
/* USER CODE END PendSV_IRQn 1 */
}
/**
* @brief This function handles System tick timer.
*/
void SysTick_Handler(void)
{
/* USER CODE BEGIN SysTick_IRQn 0 */
/* USER CODE END SysTick_IRQn 0 */
HAL_IncTick();
/* USER CODE BEGIN SysTick_IRQn 1 */
/* USER CODE END SysTick_IRQn 1 */
}
/******************************************************************************/
/* STM32F7xx Peripheral Interrupt Handlers */
/* Add here the Interrupt Handlers for the used peripherals. */
/* For the available peripheral interrupt handler names, */
/* please refer to the startup file (startup_stm32f7xx.s). */
/******************************************************************************/
/**
* @brief This function handles SDMMC1 global interrupt.
*/
void SDMMC1_IRQHandler(void)
{
/* USER CODE BEGIN SDMMC1_IRQn 0 */
/* USER CODE END SDMMC1_IRQn 0 */
HAL_SD_IRQHandler(&hsd1);
/* USER CODE BEGIN SDMMC1_IRQn 1 */
/* USER CODE END SDMMC1_IRQn 1 */
}
/**
* @brief This function handles DMA2 stream3 global interrupt.
*/
void DMA2_Stream3_IRQHandler(void)
{
/* USER CODE BEGIN DMA2_Stream3_IRQn 0 */
/* USER CODE END DMA2_Stream3_IRQn 0 */
HAL_DMA_IRQHandler(&hdma_sdmmc1_rx);
/* USER CODE BEGIN DMA2_Stream3_IRQn 1 */
/* USER CODE END DMA2_Stream3_IRQn 1 */
}
/**
* @brief This function handles DMA2 stream6 global interrupt.
*/
void DMA2_Stream6_IRQHandler(void)
{
/* USER CODE BEGIN DMA2_Stream6_IRQn 0 */
/* USER CODE END DMA2_Stream6_IRQn 0 */
HAL_DMA_IRQHandler(&hdma_sdmmc1_tx);
/* USER CODE BEGIN DMA2_Stream6_IRQn 1 */
/* USER CODE END DMA2_Stream6_IRQn 1 */
}
/* USER CODE BEGIN 1 */
/**
* @brief Rx Transfer completed callbacks
* @param hsd: Pointer SD handle
* @retval None
*/
void HAL_SD_RxCpltCallback(SD_HandleTypeDef *hsd)
{
HAL_GPIO_TogglePin(GPIOB, GPIO_PIN_1);
rx_done = 1;
}
/**
* @brief Tx Transfer completed callbacks
* @param hsd: Pointer to SD handle
* @retval None
*/
void HAL_SD_TxCpltCallback(SD_HandleTypeDef *hsd)
{
HAL_GPIO_TogglePin(GPIOB, GPIO_PIN_1);
tx_done = 1;
}
/**
* @brief SD error callbacks
* @param hsd: Pointer SD handle
* @retval None
*/
void HAL_SD_ErrorCallback(SD_HandleTypeDef *hsd)
{
HAL_GPIO_TogglePin(GPIOB, GPIO_PIN_0);
}
/* USER CODE END 1 */
/************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/
#include "bsp_sdmmc.h"
#include <string.h>
#include "delay.h"
//SD_ReadDisk/SD_WriteDisk函数专用buf,当这两个函数的数据缓存区地址不是4字节对齐的时候,
//需要用到该数组,确保数据缓存区地址是4字节对齐的.
__align(4) uint8_t SDIO_DATA_BUFFER[512];
//读SD卡
//buf:读数据缓存区
//sector:扇区地址
//cnt:扇区个数
//返回值:错误状态;0,正常;其他,错误代码;
uint8_t SD_ReadDisk(uint8_t* buf,uint32_t sector,uint8_t cnt)
{
uint8_t sta=HAL_OK;
uint8_t n;
if((uint32_t)buf%4!=0)
{
for(n=0;n<cnt;n++)
{
rx_done = 0;
sta=HAL_SD_ReadBlocks_DMA(&hsd1, SDIO_DATA_BUFFER, sector+n, 1);//单个sector的读操作
while(!rx_done);
memcpy(buf,SDIO_DATA_BUFFER,BLOCKSIZE);
buf+=512;
}
}else
{
rx_done = 0;
sta=HAL_SD_ReadBlocks_DMA(&hsd1, buf, sector, cnt);//多个sector的读操作
while(!rx_done);
}
while(1)
{
if(4 == HAL_SD_GetCardState(&hsd1))
{
break;
}
delay_us(100);
}
return sta;
}
//写SD卡
//buf:写数据缓存区
//sector:扇区地址
//cnt:扇区个数
//返回值:错误状态;0,正常;其他,错误代码;
uint8_t SD_WriteDisk(uint8_t *buf,uint32_t sector,uint8_t cnt)
{
uint8_t sta=HAL_OK;
uint8_t n;
if((uint32_t)buf%4!=0)
{
for(n=0;n<cnt;n++)
{
memcpy(SDIO_DATA_BUFFER,buf,BLOCKSIZE);
tx_done = 0;
sta=HAL_SD_WriteBlocks_DMA(&hsd1, SDIO_DATA_BUFFER, sector+n, 1);//单个sector的写操作
while(!tx_done);
buf+=BLOCKSIZE;
}
}else
{
tx_done = 0;
sta=HAL_SD_WriteBlocks_DMA(&hsd1, buf, sector, cnt);//多个sector的写操作
while(!tx_done);
}
while(1)
{
if(4 == HAL_SD_GetCardState(&hsd1))
{
break;
}
delay_us(100);
}
return sta;
}
//while(1)
//{
// if(4 == HAL_SD_GetCardState(&hsd1))
// {
// break;
// }
// delay_us(100);
//}
总结:
1、

2、
3、



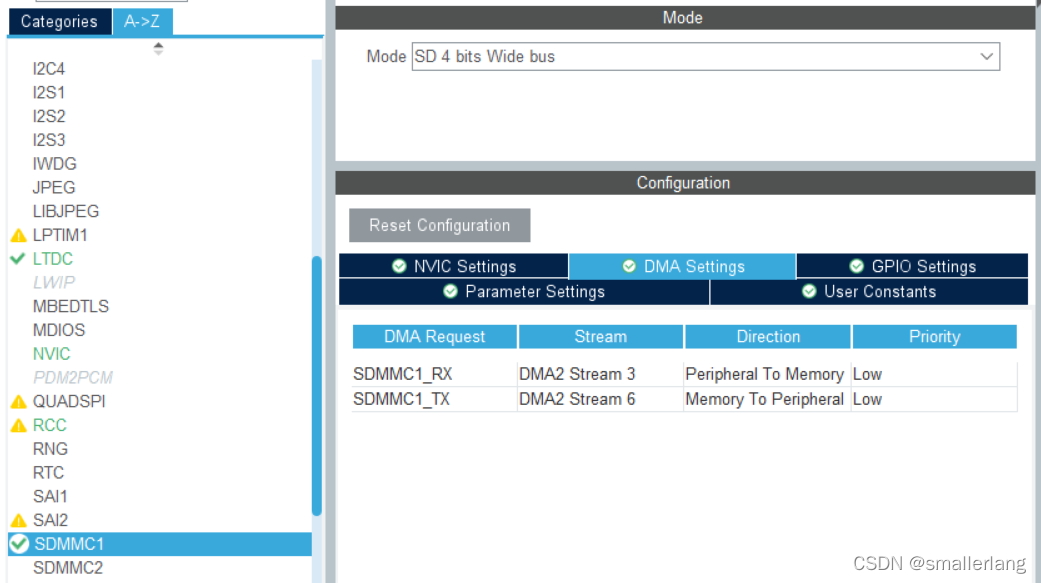
4、SDMMC1 global interrupt需要使能,否则DMA写SD卡会有问题
5、使用DMA读写SD卡,可以不使能ICACHE、DCACHE,CACHE问题后面再看
6、读写SD卡过程中不能关闭全局中断,因为无法进入中断,程序会卡在读写函数的while()循环中
7、
读写后需要加入一段代码判断SD卡是否就绪
while(1)
{
if(4 == HAL_SD_GetCardState(&hsd1))
{
break;
}
delay_us(100);
}















 736
736











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









