







 本文介绍了单片机与人机界面触摸屏通讯的两种方法:Modbus RTU协议和自由协议,提供了详细的操作步骤和源代码。通过组态软件创建工程,绑定寄存器,使用宏指令进行数据交换,帮助工程师轻松实现人机界面的界面编程。
本文介绍了单片机与人机界面触摸屏通讯的两种方法:Modbus RTU协议和自由协议,提供了详细的操作步骤和源代码。通过组态软件创建工程,绑定寄存器,使用宏指令进行数据交换,帮助工程师轻松实现人机界面的界面编程。
很多时候,工业控制或者产品设计方面受到PLC这种功能确定,扩展麻烦,成本昂贵等方面的制约因素,需要独立开发一种特殊功能,但是又需要连接触摸屏通讯,工程师在这个方面往往需要花费很大功夫,现在我要帮大家解决的问题就是 单片机与人机界面触摸屏通讯的最简单,最有效的 2种方法,其实就是分为2种通讯协议,即工业标准的 Modbus RTU协议和工程师自己定义的 自由协议。
本实例采用其中一款人机界面作为参考,提供一系列的技术支持和公布单片机源代码,加上公司的人机界面支持自由协议等等先天优势,开发工程方便快捷有效。

方案比较:
方案一 modbus—rtu协议:
优点:工业标准通讯协议,具有通用性,,传输数据量大
缺点:需要时间去了解协议的格式和以及按照规定编写通讯程序(我们提供MODBUS-RTU源代码,客户直接移植就可以,不必费心)
方案二 自由协议:
优点:数据格式客户自己定义,灵活多变,定制性强,可以模拟任何已知报文的通讯协议,单片机工程师比较容易接受,容易上手
缺点:传输数据量不大,通用性不强,移植不方便
工程师可以根据以上两种通讯协议的优缺点来选择理想的方案;
单片机工程师可以索取单片机自由协议或者Modbus RTU协议 QQ:1962162065
现在我们重点介绍工业触摸屏人机界面的自由通讯协议。
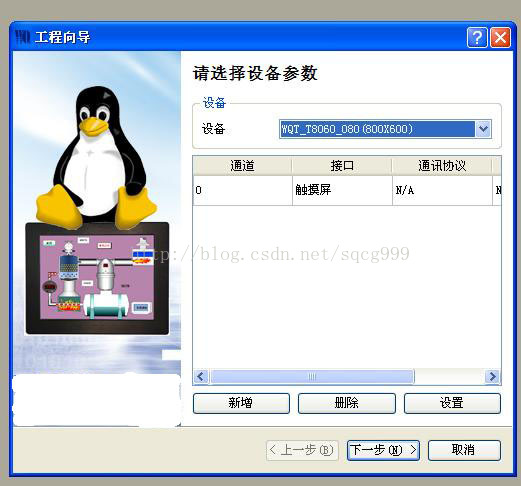
首先下载工业触摸屏人机界面的组态软件,下载安装好软件之后,新建一个工程文件,
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1318
1318

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









