







钉钉outgoing机器人摸索历程之准备篇
一:权限申请
之前在网上看到过一篇博客,自定义机器人也是支持outgoing回调机制,但是现在来看,自定义机器人已经不支持outgoing回调机制了,想要outgoing,我们必须使用企业内部的机器人。
想要开发企业内部机器人,我们需要成员自己钉钉企业的开发人员。
先向企业总管理员申请开发者权限,老师直接给了我一个子管理员权限,然后我就直接拥有了开发者权限。
二:选择开发类型
有了管理员权限之后,我们可以登录开发者后台,开发者后台中可以选择你要开发的类型。我们选择是是企业内部应用开发。


三:开发管理配置
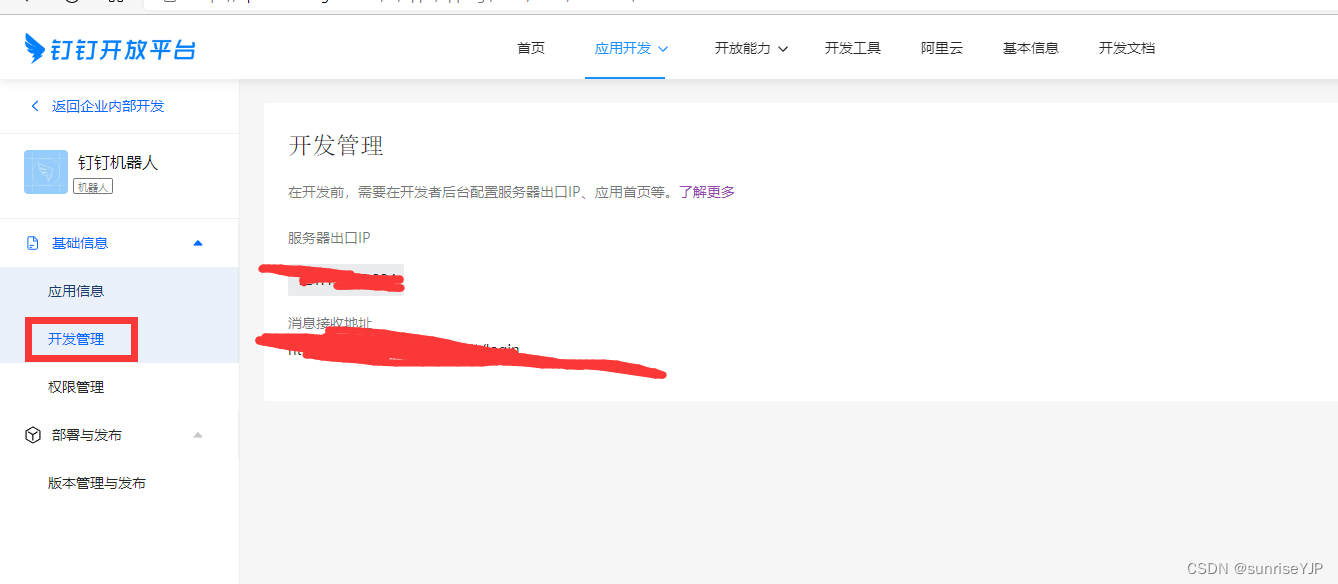
服务器出口ip:钉钉第三方接口给你添加的白名单,让我们能够访问钉钉提供的API接口。
消息接收地址 : outgoing回调机制的核心,@机器人后机器人会去以特定的格式数据访问我们消息接收地址。该地址必须是开放的,所有公网都能访问。对于Golang,我们可以根据此数据的格式去定义一个结构体,创建对象来接收所有的数据,然后我们拿到钉钉给我们的数据之后,我们就可以根据自己的业务逻辑进行处理,从而实现机器人的outgoing。
钉钉官网原话:通过@群机器人,将消息发送到指定外部服务,还可以将外部服务的响应结果返回到群组。这里填写一个公网可访问的HTTPS/HTTP地址,用于接收POST过来的消息。
至此,前期的一些基础工作已经完成了,接下来就是权限申请与配置,详细了解钉钉开放文档和API去开发支持outgoing回调的机器人了。
后期更新
在开发的过程中,如果直接开发的是机器人,将会有好多权限问题,钉钉给机器人类型的开发权限有些不足,所以后期我进行的是小程序开发,小程序开发的话,权限齐全,我们只需要在小程序开发的过程中申请一个机器人即可,此机器人也是支持回调的。















 4583
4583











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









