






# ROBOT TELEOPERATIVO: Collaborative Cybernetic Systems for Immersive Remote Teleoperation
[1]. Tefera, Y.T., et al. ROBOT TELEOPERATIVO: Collaborative Cybernetic Systems for Immersive Remote Teleoperation. 2024: IEEE.
#teleoperation
最先进的远程机器人遥操作系统正改变我们处理最急迫和危险环境中复杂任务的方式。研究表明遥操作的优化方法涉及人在环远程导引和本地机器人自主的组合,从而提供优越的适应性和在非结构和杂论无章环境和安全的运行。尽管已大量的研究,但遥操作仍面临相当大的挑战在复杂和不可预测的灾害环境中。快速的变化、碎片、和障碍物需要不断适应以确保有效操作。此外,损坏的通信设施可能导致不可靠的控制和精准性的降低,使任务更加复杂。这些因素表明需要健壮的和高适应性的机器人系统具有在极端环境处理和维护可靠性能的能力。
本文介绍了Robot Teleoperativo项目。该项目的目标通过为在所要求环境中移动机器人和机械臂使用的先进遥操作机器人技术应对以上挑战。
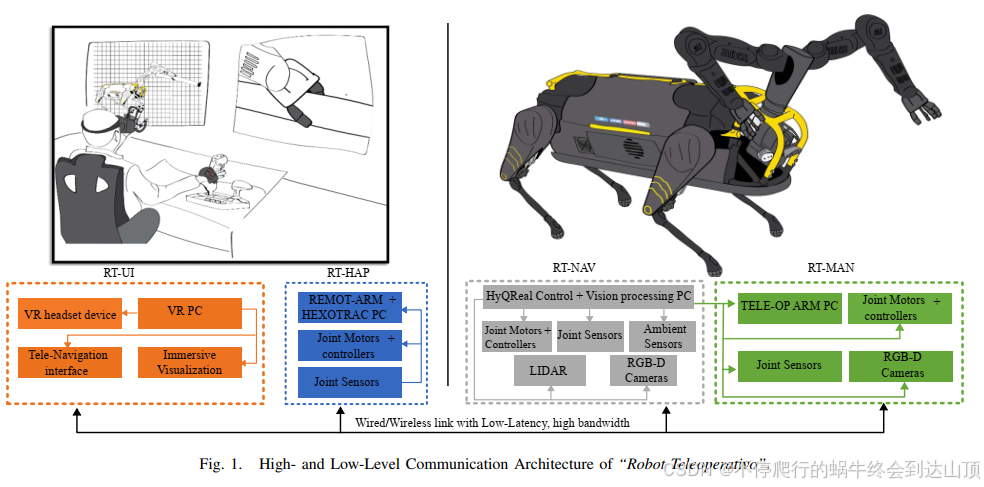
- 本项目的系统由操作站(MASTER)和远程机器人(FIELD)两个子系统组成。FIELD子系统由RT-Nav – Legged robot system和B. RT-Man – Dual-arm manipulation system组成,MASTER子系统由C. RT-Hap - Dual-arm haptic teleoperation interface和D. RT-UI - VR-based user interface组成。
RT-UI在FIELD和Pilot站使用最新的计算设备创建沉浸式可视化。FIELD采集和传输视觉和传感器数据到Pilot站,同时,Pilot站处理交互软件,即VR和AR模块,从而产生沉浸 式视觉体验。视觉接口可以提供完整沉浸式VR环境,集成多实时的视频流、点云和传感器数据。
本项目验证了5个测试用例,成功演示了该系统在地形导航、灵巧抓取、触觉遥操作和有效数据传输中有效性和沉浸式可视化系统可显著增强遥操作性能。点云和视频的流在网络中传输时,带宽和延迟是最大挑战。测试了FIELD到MASTER端到端的单向延迟。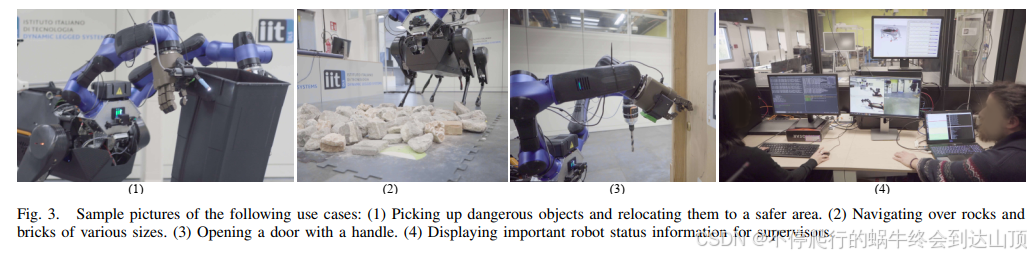 以后的调查要包括全面用户研究以测量在体验质量、遥操作性能和真实世界环境的参与的影响。
以后的调查要包括全面用户研究以测量在体验质量、遥操作性能和真实世界环境的参与的影响。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









