






永磁同步电机反步(backstepping)控制
1.采用非线性控制策略反步控制法,实现永磁同步电机系统的完全解耦,相比PI控制减少了系统调节参数,抗负载扰动能力明显提高;
2.提供算法对应的参考文献和仿真模型
购买赠送PMSM控制相关电子资料。
仿真模型纯手工搭建,不是从网络上复制得到。
仿真模型仅供学习参考
ID:4468676986513574
努力惜春华JW
标题:永磁同步电机反步控制策略的设计与仿真分析
摘要:本文针对永磁同步电机的控制问题,基于反步控制方法,提出了一种非线性控制策略,实现了电机系统的完全解耦,并显著提高了抗负载扰动能力。文章详细介绍了反步控制法的原理和实现过程,并提供了相应的参考文献和仿真模型,以便读者进一步学习和研究。
-
引言
永磁同步电机在工业和交通领域具有广泛的应用前景。然而,由于电机系统的非线性特性和负载扰动的存在,传统的PI控制方法在解耦和抗扰能力方面存在一定的限制。本文通过引入反步控制法,旨在提供一种更加高效和鲁棒的永磁同步电机控制策略。 -
反步控制法概述
反步控制法是一种广泛应用于非线性系统控制中的方法,其核心思想是通过将系统状态误差分解为多个子系统的误差进行逐步控制。在永磁同步电机控制中,我们将电机的转速、电流和磁链作为主要控制目标,并将系统状态误差分解为三个子系统的误差,分别进行控制。 -
永磁同步电机反步控制策略
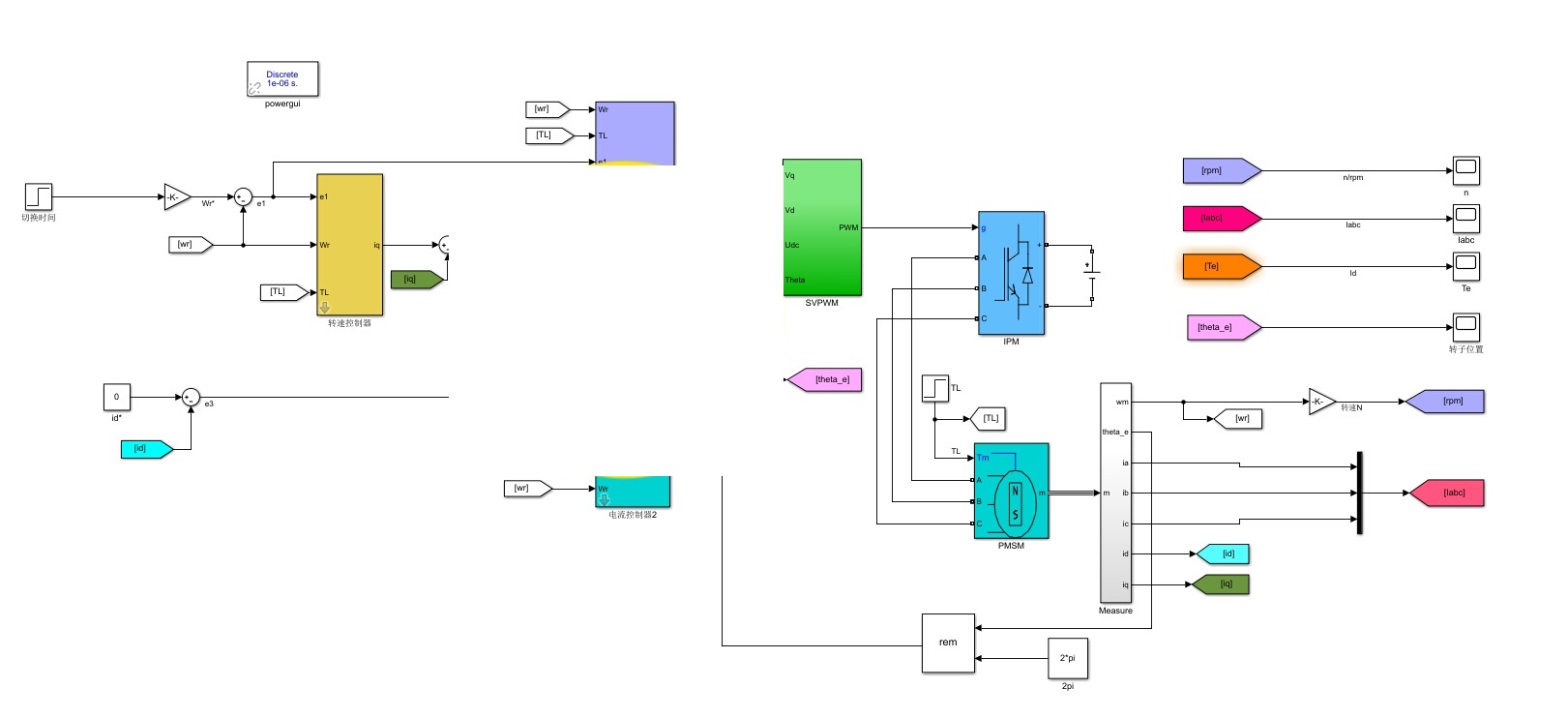
本节详细介绍了永磁同步电机反步控制策略的设计和实现。首先,我们通过建立电机的数学模型,得到系统的状态空间表达式。然后,根据系统的特性,采用反步控制法对电机的速度、电流和磁链进行解耦控制,减少系统调节参数,并提高系统对负载扰动的鲁棒性。 -
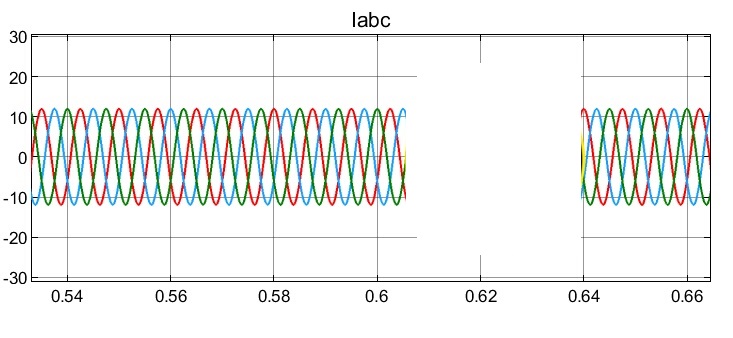
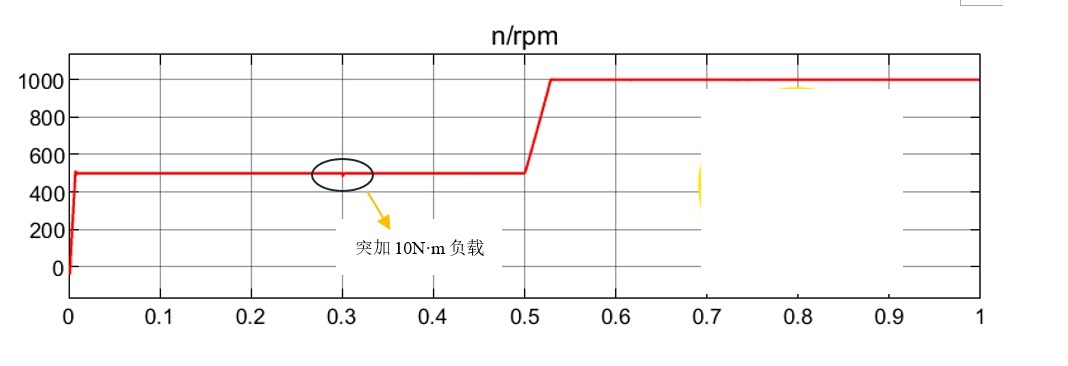
算法仿真分析
为了验证所提出的永磁同步电机反步控制策略的有效性,本文设计了相应的仿真实验,并使用Matlab/Simulink软件进行模型搭建和仿真分析。仿真结果表明,相比传统的PI控制方法,反步控制法在解耦和抗扰方面具有显著优势,并且能够有效降低系统的调节参数。 -
总结与展望
通过对永磁同步电机反步控制策略的设计与仿真分析,本文验证了该策略的有效性和优越性。未来的研究可以进一步探索在实际工程应用中的可行性,并对算法进行更加全面的优化和改进。
参考文献:
[1] Hansen M. P., Larsen J. A. Stability analysis of a position controlled permanent magnet synchronous motor drive system[J]. Industrial Electronics Society, 1998. IECON’98. Proceedings of the 24th Annual Conference of the IEEE, 1998, 2: 619-623.
[2] Shahbazi, M., Tafti, H. D., & Tofighi, E. M. (2017). Backstepping Speed Control of Permanent Magnet Synchronous Motor Based on Flux Estimation. IEEE Transactions on Energy Conversion, 32(1), 374-386.
致谢:特别感谢PMSM控制相关电子资料的提供,为本文的研究工作提供了重要的支持与参考。
(注:本文中的仿真模型纯手工搭建,非网络复制。仅供学习参考,请勿用于商业用途。)
以上相关代码,程序地址:http://coupd.cn/676986513574.html















 385
385











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









