







第四章
序列建模与概率图模型
序列建模是分析时间序列数据的一种方法,通常用于预测未来的事件。概率图模型是一种表示随机变量及其依赖关系的图形化模型。常见的概率图模型包括贝叶斯网络和马尔可夫随机场。
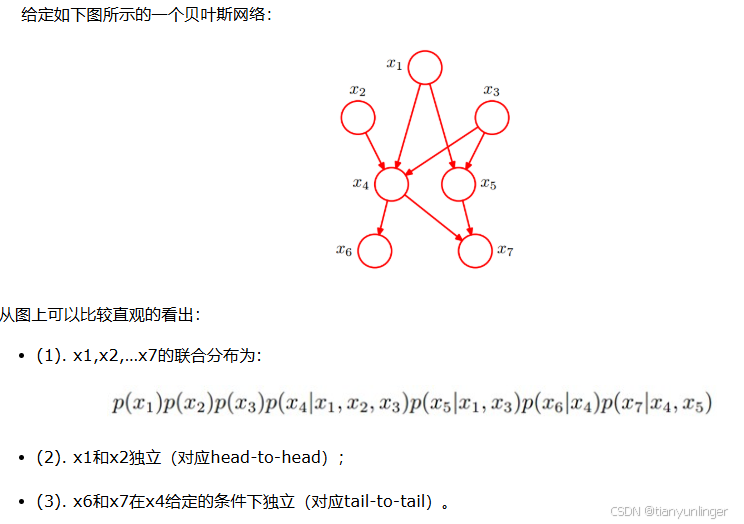
贝叶斯网络
贝叶斯网络(Bayesian Network)是一种有向无环图(DAG),用于表示随机变量之间的条件依赖关系。它通过节点表示随机变量,通过有向边表示变量之间的依赖关系。贝叶斯网络常用于概率推理和决策分析,能够高效地处理不完全数据和进行预测。
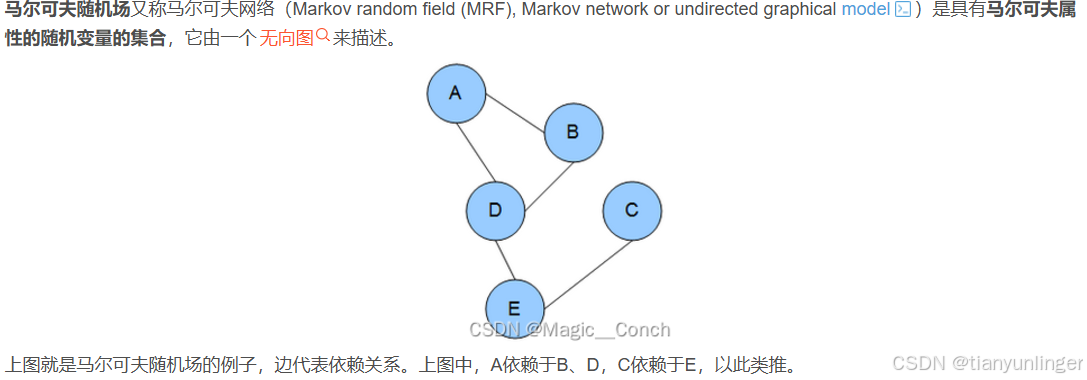
马尔可夫随机场
马尔可夫随机场(Markov Random Field,MRF)是一种无向图模型,用于表示一组随机变量之间的相互依赖关系。它假设每个变量在给定其邻居节点的情况下,与其他所有变量条件独立。
马尔可夫观测过程
马尔可夫观测过程是一种基于马尔可夫链的模型,用于描述系统的状态和观测之间的关系。它假设系统的未来状态只取决于当前状态,与过去的状态无关。
马尔可夫决策过程
马尔可夫决策过程 (MDP) 是一种用于决策优化的数学模型。它通过定义状态、动作、转移概率和奖励来描述一个智能体在环境中如何选择最佳策略。
马尔可夫奖励过程
马尔可夫奖励过程是马尔可夫决策过程的一部分,主要关注在给定状态和动作下的奖励。奖励函数通常用于表示某种效用或代价。
贝尔曼方程
贝尔曼方程是马尔可夫决策过程中的核心公式,用于递归地计算每个状态的价值。它表示当前状态的价值等于即时奖励加上未来状态的期望价值。
V ( s ) = max a [ R ( s , a ) + γ ∑ s ′ P ( s ′ ∣ s , a ) V ( s ′ ) ] V(s) = \max_a \left[ R(s, a) + \gamma \sum_{s'} P(s'|s, a) V(s') \right] V(s)=amax[R(s,a)+γs′∑P(s′∣s,a)V(s′)]
第五章
动态回归(Dynamic Programming)
动态回归(Dynamic Programming, DP)是一种解决复杂问题的方法,通常用于优化问题。它通过将问题分解为子问题,并利用子问题的解来构建原问题的解。动态回归尤其适用于具有重叠子问题和最优子结构性质的问题。
策略迭代(Policy Iteration)
策略迭代是一种求解马尔可夫决策过程(MDP)的算法。它通过不断改进策略来找到最优策略,通常分为两个主要步骤:
策略评估(Policy Evaluation):给定一个策略,计算每个状态的价值。
策略改进(Policy Improvement):根据当前策略的价值,改进策略,使得新的策略能获得更高的价值。
该过程不断重复,直到策略不再改变,达到最优策略。
价值迭代(Value Iteration)
价值迭代是另一种求解马尔可夫决策过程(MDP)的算法。它通过反复更新每个状态的价值,直接找到最优价值函数。主要步骤包括:
值更新(Value Update):根据贝尔曼方程,更新每个状态的价值。
策略提取(Policy Extraction):一旦价值函数收敛,从中提取最优策略。
价值迭代通常比策略迭代更简单,但在某些情况下收敛速度较慢。
第六章
蒙特卡罗方法(Monte Carlo Methods)
这种方法基于随机采样来估计结果。常用于数值积分和优化问题。比如,模拟大量随机样本来估算一个复杂积分的值。
时序差分(Temporal Difference, TD)
这是一种用来评估某个策略的价值的方法。通过比较预测和实际结果的差异来调整估计值。TD方法结合了蒙特卡罗方法和动态规划的优点。
广义策略迭代(Generalized Policy Iteration, GPI)
GPI是指策略评估和策略改进的交替过程。这种方法是很多强化学习算法的基础,通过不断改进策略来优化行为。
Q学习(Q-Learning)
这是一种无模型的强化学习算法,用于找到最佳动作选择策略(即Q函数)。它通过更新Q值来逐步改善策略,不需要环境模型。
SARSA
SARSA也是一种强化学习算法,与Q学习类似。但它更新的是“实际路径”上的Q值,而不是估计最佳路径上的Q值。SARSA的更新规则基于当前状态-动作对、结果状态、结果动作对的五元组(State-Action-Reward-State-Action)。
例子:如果智能体在当前策略下选择了向右移动并获得了奖励,那么SARSA会根据实际向右移动后的状态和下一个实际动作来更新Q值。即使智能体在策略下向右移动,Q学习仍会根据假设最优的未来动作来更新当前Q值,而不一定是实际采取的动作。
第七章
深度Q网络(Deep Q-Network, DQN)
深度Q网络是一种将深度学习与强化学习结合的方法,用于解决复杂的决策问题。以下是DQN的关键点:
-
Q函数:
Q函数(或动作价值函数)用于评估在给定状态下采取某个动作的价值。传统的Q学习直接更新Q值表,但在高维空间中,维护Q值表变得不可行。 -
深度神经网络:
DQN使用深度神经网络来估计Q值。网络的输入是状态,输出是每个可能动作对应的Q值。 -
经验回放(Experience Replay):
DQN使用经验回放机制来提高样本效率和稳定性。在每个时间步,将经历(状态、动作、奖励、下一个状态)存储到经验回放缓冲区。从缓冲区中随机抽取小批量样本用于网络训练。 -
目标网络(Target Network):
为了稳定训练过程,DQN引入了目标网络。这是一个周期性更新的副本网络,用于生成训练目标,从而减少了目标值的快速变化带来的不稳定性。 -
损失函数:
DQN的损失函数通常是时序差分误差的平方,如下所示:
L ( θ ) = E [ ( r + γ max a ′ Q ( s ′ , a ′ ; θ − ) − Q ( s , a ; θ ) ) 2 ] L(\theta) = \mathbb{E}[(r + \gamma \max_{a'} Q(s', a'; \theta^-) - Q(s, a; \theta))^2] L(θ)=E[(r+γa′maxQ(s′,a′;θ−)−Q(s,a;θ))2]
其中 ( θ ) ( \theta ) (θ) 和 ( θ − ) (\theta^-) (θ−) 分别是当前网络和目标网络的参数,( r ) 是奖励,( s ) 和 ( s’ ) 是当前状态和下一个状态, ( a ) 和 ( a’ ) 是当前动作和下一个动作。
总结来说,DQN在解决高维决策问题时表现优异,通过结合深度学习和强化学习的优势,有效学习了复杂环境中的策略。
第八章
策略梯度(Policy Gradient)
策略梯度方法是一类直接优化策略(即行为决策规则)的强化学习算法。其核心思想是,通过梯度上升(或下降)的方法来找到一个最优策略,使得在给定环境中的长期累积回报最大化。
核心思想
-
策略表示:
- 策略是一种从状态到动作的映射,可以用一个参数化的函数表示,通常用神经网络实现,记作 π ( a ∣ s ; θ ) \pi(a|s; \theta) π(a∣s;θ),其中 θ \theta θ 是策略的参数。
-
目标函数:
- 强化学习的目标是最大化累积回报 J ( θ ) J(\theta) J(θ)。策略梯度方法直接对这个目标函数求导,通过调整参数 θ \theta θ来优化策略。
-
梯度估计:
- 利用蒙特卡罗采样或时序差分方法估计梯度,以更新策略参数。
策略梯度原理
策略梯度定理给出了累积回报对策略参数的梯度公式:
∇ θ J ( θ ) = E π θ [ ∇ θ log π θ ( a ∣ s ) Q π ( s , a ) ] \nabla_\theta J(\theta) = \mathbb{E}_{\pi_\theta} \left[ \nabla_\theta \log \pi_\theta(a|s) Q^\pi(s, a) \right] ∇θJ(θ)=Eπθ[∇θlogπθ(a∣s)Qπ(s,a)]
其中 (Q^\pi(s, a)) 是状态-动作值函数,表示在状态 (s) 下采取动作 (a) 时的预期回报。
蒙特卡罗策略梯度(Monte Carlo Policy Gradient)
蒙特卡罗策略梯度方法(如REINFORCE算法)通过完整的轨迹来估计策略梯度:
-
采样轨迹:
- 在策略 π θ \pi_\theta πθ下采样完整的状态-动作-回报轨迹。
-
估计回报:
- 对每个状态-动作对,计算从该状态-动作开始的累积回报 G t G_t Gt。
-
更新策略:
- 根据梯度公式更新策略参数:
θ ← θ + α ∑ t ∇ θ log π θ ( a t ∣ s t ) G t \theta \leftarrow \theta + \alpha \sum_{t} \nabla_\theta \log \pi_\theta(a_t | s_t) G_t θ←θ+αt∑∇θlogπθ(at∣st)Gt
其中 α \alpha α是学习率。
近端策略优化(Proximal Policy Optimization, PPO)
近端策略优化(PPO)是一种先进的策略梯度方法,通过引入一些优化技巧来提高训练的稳定性和效率。
- 目标函数:
- PPO引入了一个剪切的目标函数来限制策略更新的幅度:
L C L I P ( θ ) = E [ min ( r t ( θ ) A ^ t , clip ( r t ( θ ) , 1 − ϵ , 1 + ϵ ) A ^ t ) ] L^{CLIP}(\theta) = \mathbb{E} \left[ \min(r_t(\theta) \hat{A}_t, \text{clip}(r_t(\theta), 1 - \epsilon, 1 + \epsilon) \hat{A}_t) \right] LCLIP(θ)=E[min(rt(θ)A^t,clip(rt(θ),1−ϵ,1+ϵ)A^t)]
其中 r t ( θ ) = π θ ( a t ∣ s t ) π θ old ( a t ∣ s t ) r_t(\theta) = \frac{\pi_\theta(a_t | s_t)}{\pi_{\theta_{\text{old}}}(a_t | s_t)} rt(θ)=πθold(at∣st)π
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









