







https://blog.csdn.net/qq_37554556/article/details/88363572基于这位优秀的博主有感而发,写完后和老师的答案还是不太一样,正在找原因中。
//前方交会
#include<stdio.h>
#include<iostream>
#include<opencv2/opencv.hpp>
#include<math.h>
using namespace std;
using namespace cv;
int main()
{
//定义同名像点的坐标
double image[2][2] = { 0.0 };
double x1 = 29.214000;
double y1 = -47.640000;
double x2 = 3.936000;
double y2 = -47.910000;
x1 = image[0][0];
y1 = image[0][1];
x1 = image[1][0];
y1 = image[1][1];
//定义内方位元素
double x0 = 0.0;
double y0 = 0.0;
double f = 70.50;
//定义外方位元素
double W_ele[2][6] = { {432438.565, 3894841.049, 1274.012 , -0.005785603 , 0.0003784083 , -0.01880947 },
{ 432847.537 , 3894836.718 , 1272.414 , -0.006604103 , 0.0005394704 , 0.0007619388} };
double XS1 = W_ele[0][0];
double YS1 = W_ele[0][1];
double ZS1 = W_ele[0][2];
double phi1 = W_ele[0][3];
double omig1 = W_ele[0][4];
double kappa1 = W_ele[0][5];
double XS2 = W_ele[1][0];
double YS2 = W_ele[1][1];
double ZS2 = W_ele[1][2];
double phi2 = W_ele[1][3];
double omig2 = W_ele[1][4];
double kappa2 = W_ele[1][5];
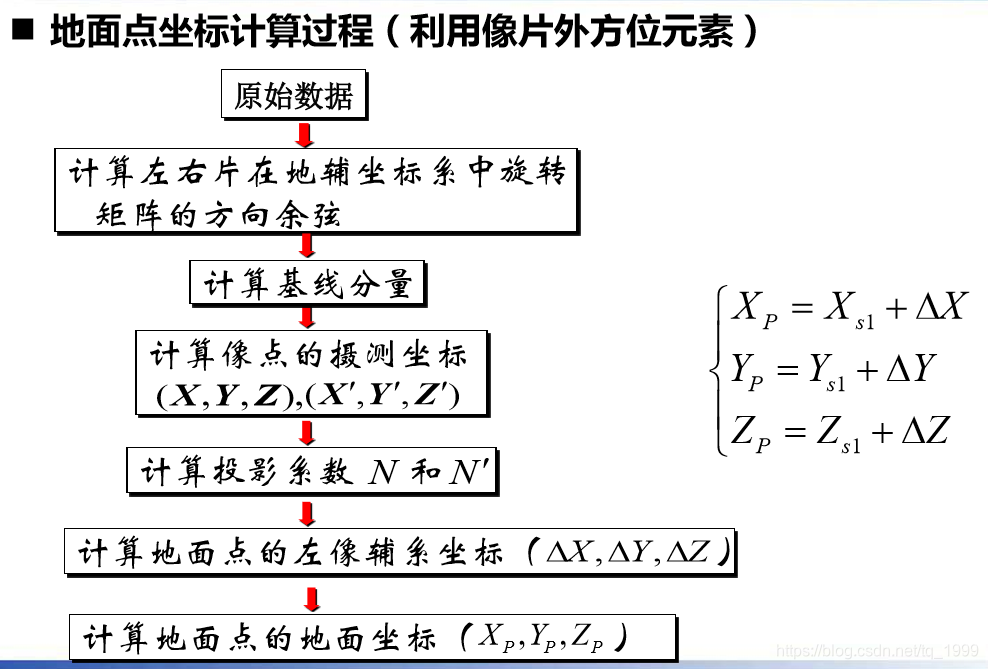
//计算基线分量
double Bx = XS2 - XS1;
double By = YS2 - YS1;
double Bz = ZS2 - ZS1;
//cout << kappa1 << endl;
//确定外方位角元素
double a1 = cos(phi1)*cos(kappa1) - sin(phi1)*sin(omig1)*sin(kappa1);
double a2= -1.0*cos(phi1)*sin(kappa1) - sin(phi1)*sin(omig1)*cos(kappa1);
double a3= -1.0*sin(phi1)*cos(omig1);
double b1= cos(omig1)*sin(kappa1);
double b2= cos(omig1)*cos(kappa1);
double b3 = -1.0*sin(omig1);
double c1 = sin(phi1)*cos(kappa1) + cos(phi1)*sin(omig1)*sin(kappa1);
double c2 = -1.0*sin(phi1)*sin(kappa1) + cos(phi1)*sin(omig1)*cos(kappa1);
double c3 = cos(phi1)*cos(omig1);
//定义旋转矩阵R1
Mat R1(3, 3, CV_64F,0.0);
R1.at<double>(0, 0) = a1;
R1.at<double>(0, 1) = a2;
R1.at<double>(0, 2) = a3;
R1.at<double>(1, 0) = b1;
R1.at<double>(1, 1) = b2;
R1.at<double>(1, 2) = b3;
R1.at<double>(2, 0) = c1;
R1.at<double>(2, 1) = c2;
R1.at<double>(2, 2) = c3;
double aa1 = cos(phi2)*cos(kappa1) - sin(phi2)*sin(omig2)*sin(kappa2);
double aa2 = -1.0*cos(phi2)*sin(kappa1) - sin(phi2)*sin(omig2)*cos(kappa2);
double aa3 = -1.0*sin(phi2)*cos(omig1);
double bb1 = cos(omig2)*sin(kappa1);
double bb2 = cos(omig2)*cos(kappa1);
double bb3 = -1.0*sin(omig2);
double cc1 = sin(phi2)*cos(kappa2) + cos(phi2)*sin(omig2)*sin(kappa2);
double cc2 = -1.0*sin(phi2)*sin(kappa2) + cos(phi2)*sin(omig2)*cos(kappa2);
double cc3 = cos(phi2)*cos(omig2);
//定义旋转矩阵R2
Mat R2(3, 3, CV_64F, 0.0);
R2.at<double>(0, 0) = aa1;
R2.at<double>(0, 1) = aa2;
R2.at<double>(0, 2) = aa3;
R2.at<double>(1, 0) = bb1;
R2.at<double>(1, 1) = bb2;
R2.at<double>(1, 2) = bb3;
R2.at<double>(2, 0) = cc1;
R2.at<double>(2, 1) = cc2;
R2.at<double>(2, 2) = cc3;
//printf("a1=%lf", aa1);
//定义同名像点的像空间辅助坐标系RR1(X1,Y1,Z1)和RR2(X2,Y2,Z)
Mat RR1(3, 1, CV_64F, 0.0);
Mat RR2(3, 1, CV_64F, 0.0);
Mat RR11(3, 1, CV_64F, 0.0);
RR11.at<double>(0, 0) = x1;
RR11.at<double>(1, 0) = y1;
RR11.at<double>(2, 0) = -f;
Mat RR22(3, 1, CV_64F, 0.0);
RR22.at<double>(0, 0) = x2;
RR22.at<double>(1, 0) = y2;
RR22.at<double>(2, 0) = -f;
RR1 = R1*RR11;
double X1 = RR1.at<double>(0, 0);
double Y1 = RR1.at<double>(1, 0);
double Z1 = RR1.at<double>(2, 0);
RR2 = R2*RR22;
double X2 = RR2.at<double>(0, 0);
double Y2 = RR2.at<double>(1, 0);
double Z2 = RR2.at<double>(2, 0);
cout << "左像空间辅助坐标系:" << endl;
cout << X1 << endl;
cout << Y1 << endl;
cout << Z1 << endl;
cout << "右像空间辅助坐标系:" << endl;
cout << X2 << endl;
cout << Y2 << endl;
cout << Z2 << endl;
//计算点投影系数
double N1 = (Bx*Z2 - Bz*X2) / (X1*Z2 - Z1*X2);
double N2 = (Bx*Z1 - Bz*X1) / (X1*Z2 - Z1*X2);
//计算模型点坐标
double deteX = N1*X1;
double deteY = 0.5*(N1*Y1 + N2*Y2 + By);
double deteZ = N1*Z1;
cout << "模型点坐标:" << endl;
cout << deteX << endl;
cout << deteY << endl;
cout << deteZ << endl;
//计算地面点的地面坐标(X,Y,Z)
double XP = XS1 + deteX;
double YP = YS1 + deteY;
double ZP = ZS1 + deteZ;
cout << "地面点坐标是:" << endl;
cout <<"XP="<< XP << endl;
cout <<"YP="<< YP<< endl;
cout << "ZP="<<ZP<< endl;
//std::cout << RR1 << std::endl;
getchar();
return 0;
}
//运行结果
左像空间辅助坐标系:
-0.407883
0.0266778
-70.4988
右像空间辅助坐标系:
2.56837
-47.9375
-70.5505
模型点坐标:
56.0753
3289.33
9692.11
地面点坐标是:
XP=432495
YP=3.89813e+06
ZP=10966.1
正确结果是:


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









