







一.D-S证据理论引入
诞生
D-S证据理论的诞生:起源于20世纪60年代的哈佛大学数学家A.P. Dempster利用上、下限概率解决多值映射问题,1967年起连续发表一系列论文,标志着证据理论的正式诞生。
形成
dempster的学生G.shafer对证据理论做了进一步发展,引入信任函数概念,形成了一套“证据”和“组合”来处理不确定性推理的数学方法
D-S理论是对贝叶斯推理方法推广,主要是利用概率论中贝叶斯条件概率来进行的,需要知道先验概率。而D-S证据理论不需要知道先验概率,能够很好地表示“不确定”,被广泛用来处理不确定数据。
适用于:信息融合、专家系统、情报分析、法律案件分析、多属性决策分析
二.D-S证据理论的基本概念
定义1 基本概率分配(BPA)
设U为以识别框架,则函数m:2u→[0,1]满足下列条件:
(1)m(ϕ)=0
(2)∑A⊂Um(A)=1时
称m(A)=0表示对A的信任程度
也称为mass函数。
定义2 信任函数 (Belief Function)
Bel:2u→[0,1]
Bel(A)=∑B⊂Am(B)=1 (∀A⊂U)
表示A的全部子集的基本概率分配函数之和
定义3 似然函数(plausibility Function)
pl(A)=1−Bel(A¯¯¯)=∑B⊂Um(B)−∑B⊂A¯m(B)=∑B⋂A≠ϕm(B)
似然函数表示不否认A的信任度,是所有与A相交的子集的基本概率分配之和。
定义4 信任区间
[Bel(A),pl(A)]表示命题A的信任区间,Bel(A)表示信任函数为下限,pl(A)表示似真函数为 上限
举例:如(0.25,0.85),表示A为真有0.25的信任度,A为假有0.15的信任度,A不确定度为0.6
三.D-S证据理论的组合规则
m个mass函数的Dempster合成规则
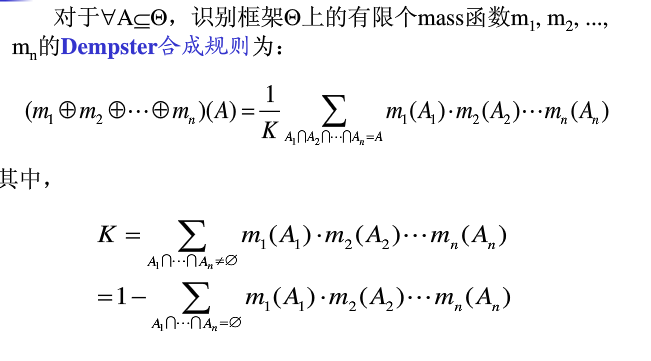
其中K称为归一化因子,1−K反 应了证据的冲突程度
四.判决规则
设存在A1,A2⊂U,满足
m(A1)=max{m(Ai),Ai⊂U}
m(A2)=max{m(Ai),Ai⊂U且Ai≠A1}
若有:
m(A1)−m(A2)>ε1
m(Θ)<ε2
m(A1)>m(Θ)
则A1为不确定集合
五.D-S证据理论存在的问题
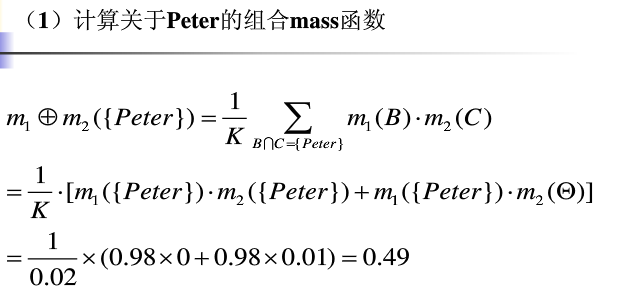
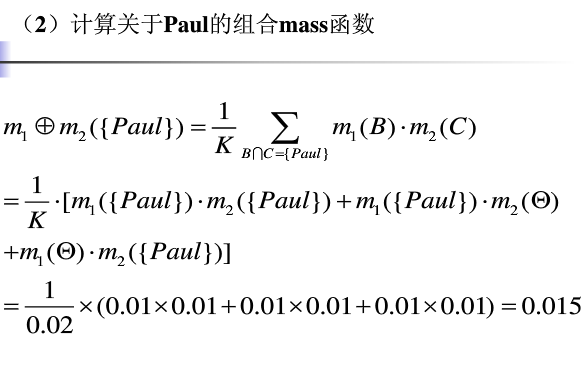
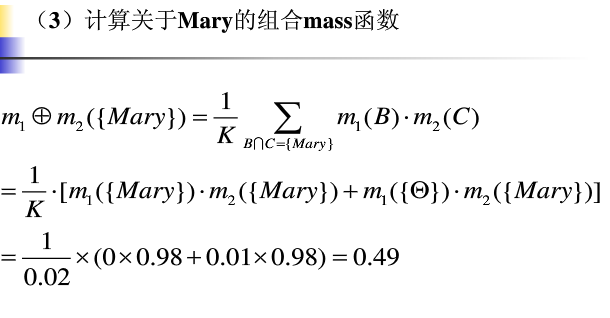
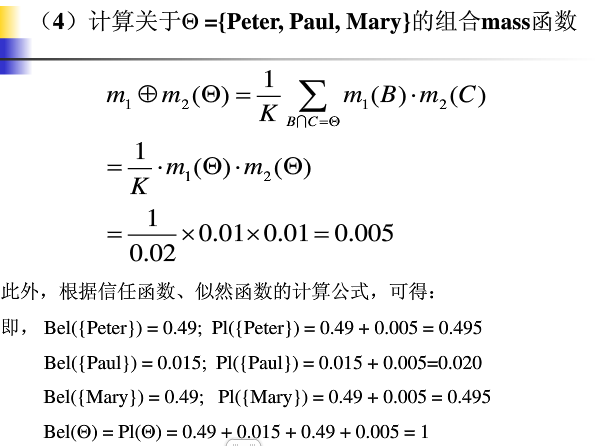
(一)无法解决证据冲突严重和完全冲突的情况
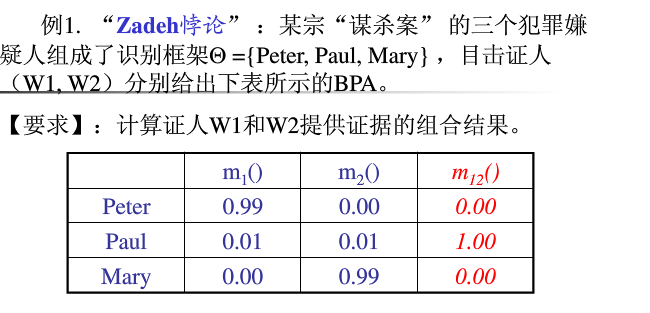
该识别框架为{Peter,Paul,Mary},基本概率分配函数为m{Peter},m{Paul},m{Mary}
由D-S证据理论的基本概念和组合规则进行解析
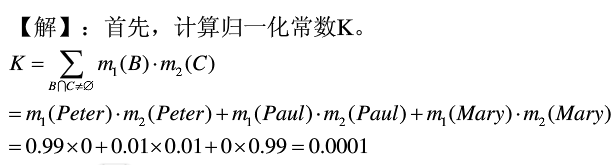
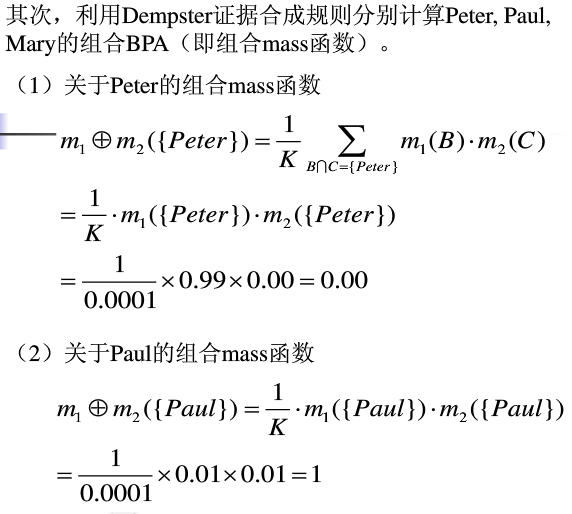
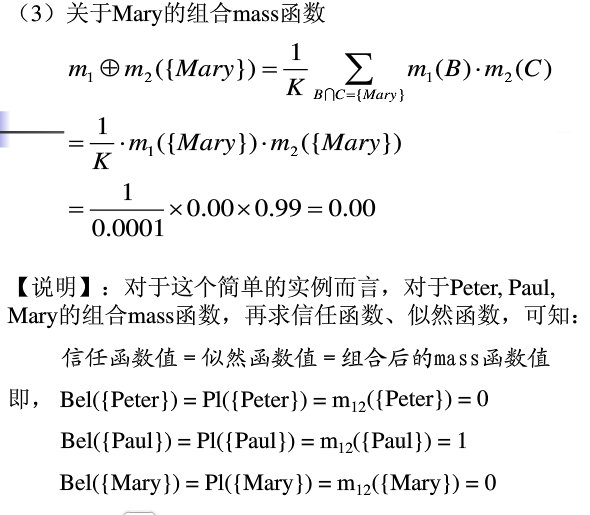
可以看出虽然在W1,W2目击中,peter和mary都为0.99,但是存在严重的冲突,造成合成之后的Bel函数值为0,这显然与实际情况不合,更极端的情况如果W1中m{peter)=1,W2中m{Mary}=1,则归一化因子K=0,D-S组合规则无法进行
(二)难以辨识模糊程度
由于证据理论中的证据模糊主要来自于各子集的模糊度。根据信息论的观点,子集中元素的个数越多,子集的模糊度越大
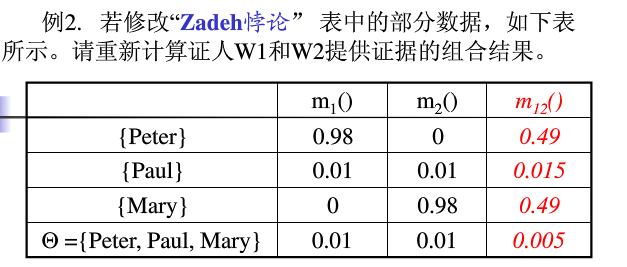
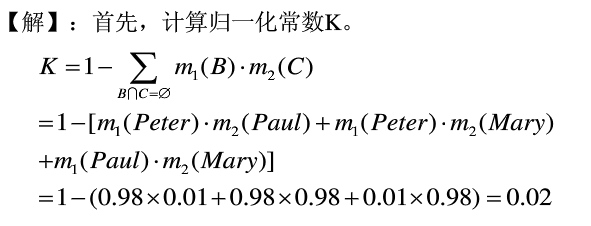
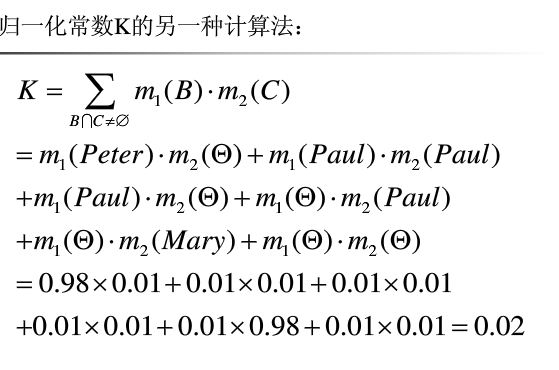
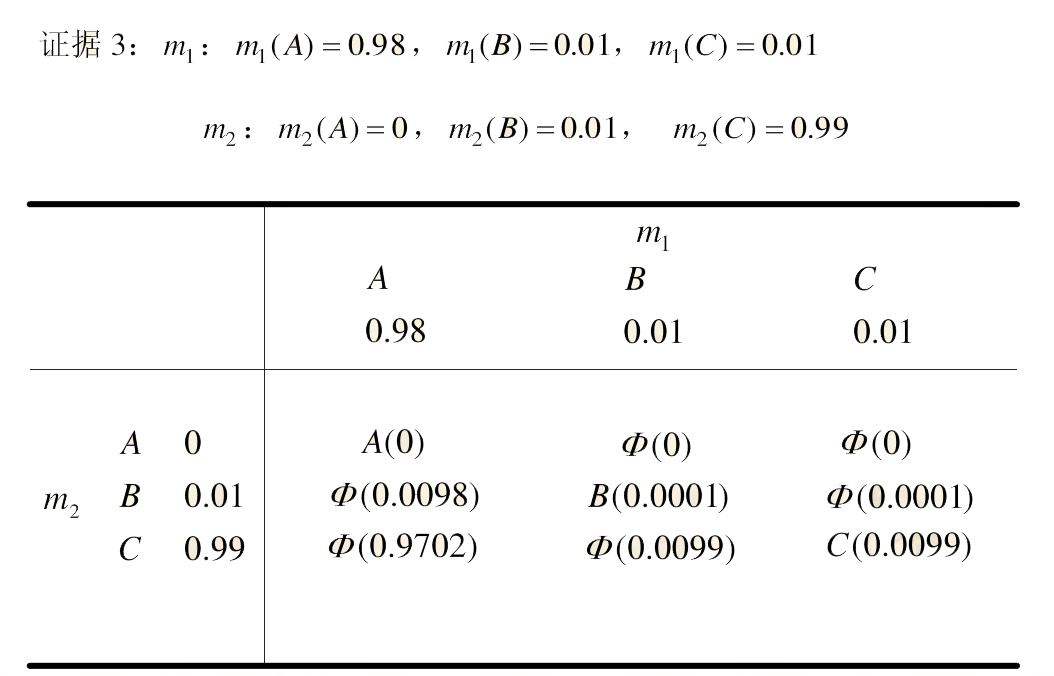
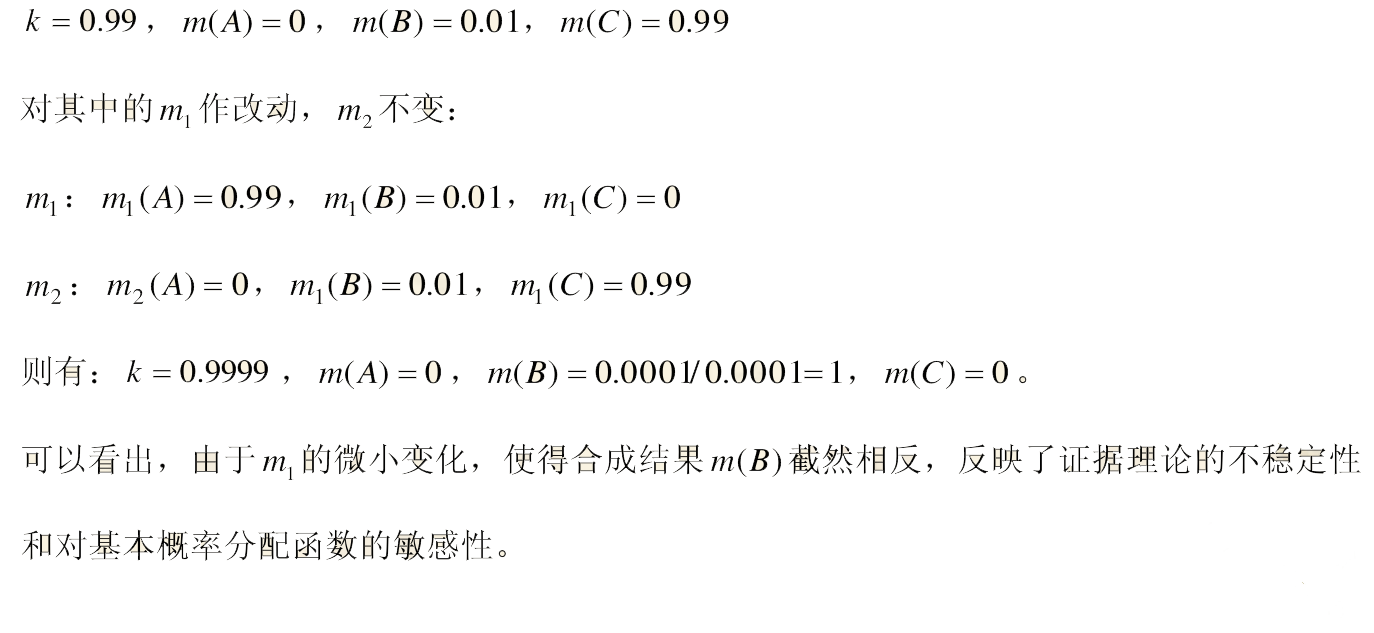
(三)基本概率分配函数的微小变化会使组合结果产生急剧变化















 2799
2799

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









