







1,
在事件处理层(evdev.c)中结构体evdev_client定义了一个环形缓冲区(circular buffer),其原理是用数组的方式实现了一个先进先出的循环队列(circular queue),用以缓存内核驱动上报给用户层的input_event事件。
struct evdev_client {
unsigned int head; //头指针
unsigned int tail; //尾指针
unsigned int packet_head; /* [future] position of the first element of next packet */ //包指针
spinlock_t buffer_lock; /* protects access to buffer, head and tail */
wait_queue_head_t wait;
struct fasync_struct *fasync;
struct evdev *evdev;
struct list_head node;
enum input_clock_type clk_type;
bool revoked;
unsigned long *evmasks[EV_CNT];
unsigned int bufsize; //循环队列大小
struct input_event buffer[]; //循环队列数组
};evdev_client对象维护了三个偏移量:head、tail以及packet_head。head、tail作为循环队列的头尾指针记录入口与出口偏移,那么包指针packet_head有什么作用呢?
packet_head
内核驱动处理一次输入,可能上报一到多个input_event事件,为表示处理完成,会在上报这些input_event事件后再上报一次同步事件。头指针head以input_event事件为单位,记录缓冲区的入口偏移量,而包指针packet_head则以“数据包”(一到多个input_event事件)为单位,记录缓冲区的入口偏移量。
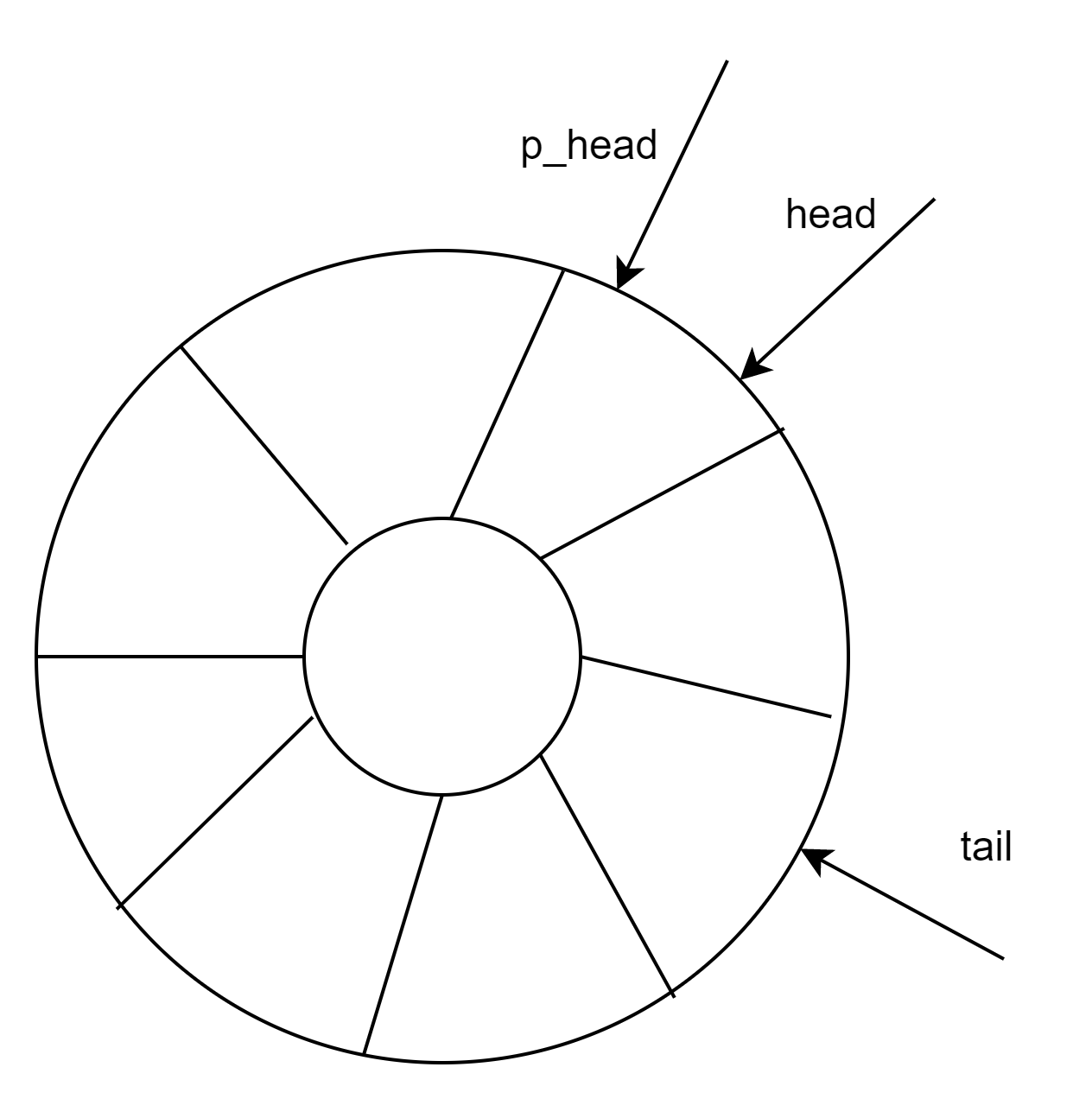
图1 环形缓冲区
2, 环形缓冲区工作机制
循环队列入队列算法
head++;
head &= bufsize - 1;循环队列出队列算法
tail++;
tail &= bufsize - 1;循环队列已满条件
head == tail;循环队列为空条件
packet_head == tail“求余”和“求与”
为解决头尾指针的上溢和下溢现象,使队列的元素空间可重复使用,一般循环队列的出入队算法都采用“求余”操作:
head = (head + 1) % bufsize; // 入队
tail = (tail + 1) % bufsize; // 出队为避免计算代价高昂的“求余”操作,使内核运作更高效,input子系统的环形缓冲区采用了“求与”算法,这要求bufsize必须为2的幂,在后文中可以看到bufsize的值实际上是为64或者8的n倍,符合“求与”运算的要求。
3,环形缓冲区的构造以及初始化
用户层通过open()函数打开input设备节点时,调用过程如下:
open() -> sys_open() -> evdev_open()
在evdev_open()函数中完成了对evdev_client对象的构造以及初始化,每一个打开input设备节点的用户都在内核中维护了一个evdev_client对象,这些evdev_client对象通过evdev_attach_client()函数注册在evdev1对象的内核链表上。
static int evdev_open(struct inode *inode, struct file *file)
{
struct evdev *evdev = container_of(inode->i_cdev, struct evdev, cdev);
//计算环形缓冲区大小bufsize
unsigned int bufsize = evdev_compute_buffer_size(evdev->handle.dev);
struct evdev_client *client;
int error;
//为evdev_client 分配内核空间
client = kvzalloc(struct_size(client, buffer, bufsize), GFP_KERNEL);
if (!client)
return -ENOMEM;
//初始化等待队列client->wait
init_waitqueue_head(&client->wait);
client->bufsize = bufsize;
spin_lock_init(&client->buffer_lock);
client->evdev = evdev;
//注册到内核链表
evdev_attach_client(evdev, client);
error = evdev_open_device(evdev);
if (error)
goto err_free_client;
file->private_data = client;
stream_open(inode, file);
return 0;
err_free_client:
evdev_detach_client(evdev, client);
kvfree(client);
return error;
}4,生产者消费者模型
内核驱动与用户程序就是典型的生产者/消费者模型,内核驱动产生input_event事件,然后通过input_event()函数写入环形缓冲区,用户程序通过read()函数从环形缓冲区中获取input_event事件。
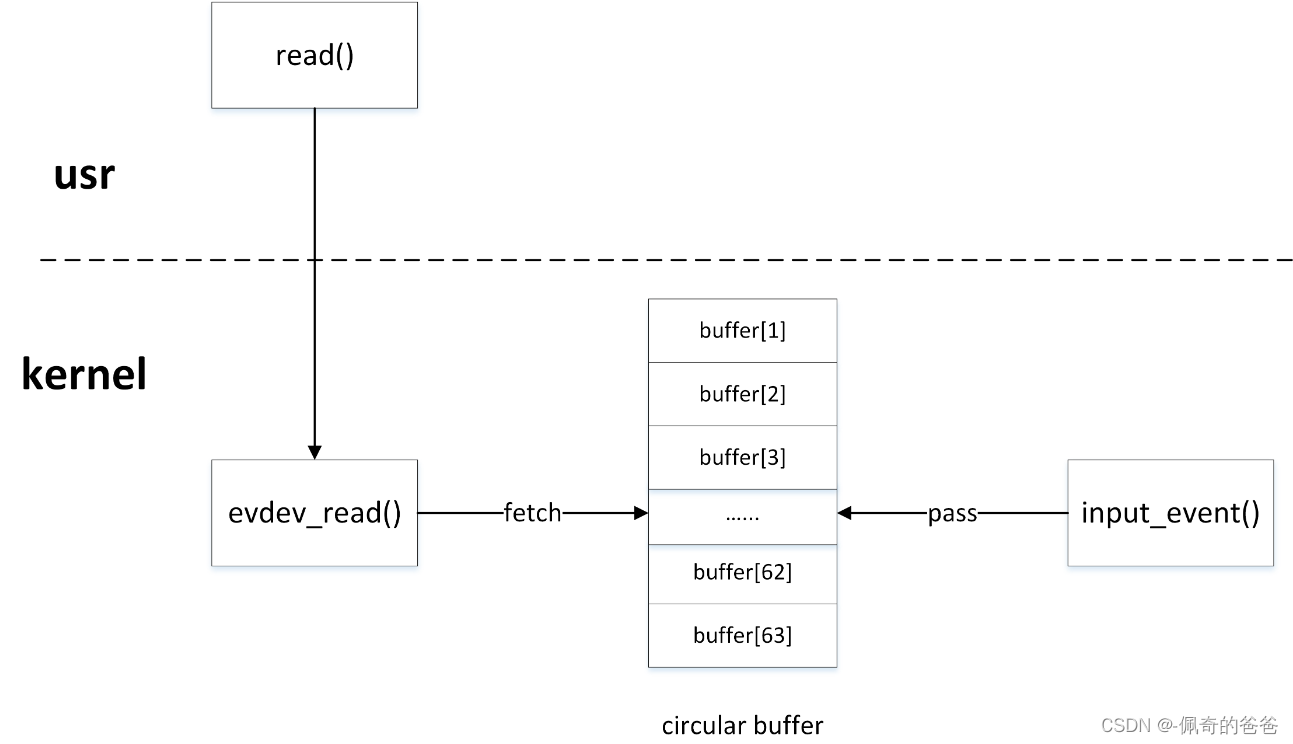
图2 生产者消费者模型
5,缓冲区的生产者
内核驱动作为生产者,通过input_event()上报input_event事件时,最终调用___pass_event()函数将事件写入环形缓冲区:
static void evdev_pass_values(struct evdev_client *client,
const struct input_value *vals, unsigned int count,
ktime_t *ev_time)
{
const struct input_value *v;
struct input_event event;
struct timespec64 ts;
bool wakeup = false;
if (client->revoked)
return;
ts = ktime_to_timespec64(ev_time[client->clk_type]);
event.input_event_sec = ts.tv_sec;
event.input_event_usec = ts.tv_nsec / NSEC_PER_USEC;
/* Interrupts are disabled, just acquire the lock. */
spin_lock(&client->buffer_lock);
for (v = vals; v != vals + count; v++) {
if (__evdev_is_filtered(client, v->type, v->code))
continue;
if (v->type == EV_SYN && v->code == SYN_REPORT) {
/* drop empty SYN_REPORT */
if (client->packet_head == client->head)
continue; //如果环形缓冲区内没有有效数据且来了一次EV_SYN event,需要丢弃空的SYN_REPORT
wakeup = true; //fill了一包数据,需要唤醒睡眠的等待队列
event.type = v->type;
event.code = v->code;
event.value = v->value;
__pass_event(client, &event);
}
spin_unlock(&client->buffer_lock);
if (wakeup)
wake_up_interruptible_poll(&client->wait,
EPOLLIN | EPOLLOUT | EPOLLRDNORM | EPOLLWRNORM); //fill了一包数据,需要唤醒睡眠的等待队列
}static void __pass_event(struct evdev_client *client,
const struct input_event *event)
{
// 将input_event事件存入缓冲区,队头head自增指向下一个元素空间
client->buffer[client->head++] = *event;
client->head &= client->bufsize - 1;
// 当队头head与队尾tail相等时,说明缓冲区空间已满
if (unlikely(client->head == client->tail)) {
/*
* This effectively "drops" all unconsumed events, leaving
* EV_SYN/SYN_DROPPED plus the newest event in the queue.
*/
client->tail = (client->head - 2) & (client->bufsize - 1); //丢弃掉环形缓冲区中的数据,只保留队列中EV_SYN/SYN_DROPPED和最新的一次event
//填充EV_SYN/SYN_DROPPED
client->buffer[client->tail] = (struct input_event) {
.input_event_sec = event->input_event_sec,
.input_event_usec = event->input_event_usec,
.type = EV_SYN,
.code = SYN_DROPPED,
.value = 0,
};
client->packet_head = client->tail;
}
// 当遇到EV_SYN/SYN_REPORT同步事件时,packet_head移动到队头head位置
if (event->type == EV_SYN && event->code == SYN_REPORT) {
client->packet_head = client->head;
kill_fasync(&client->fasync, SIGIO, POLL_IN); //异步通知:设备通知用户自身可以访问,之后用户再进行I/O处理
}
}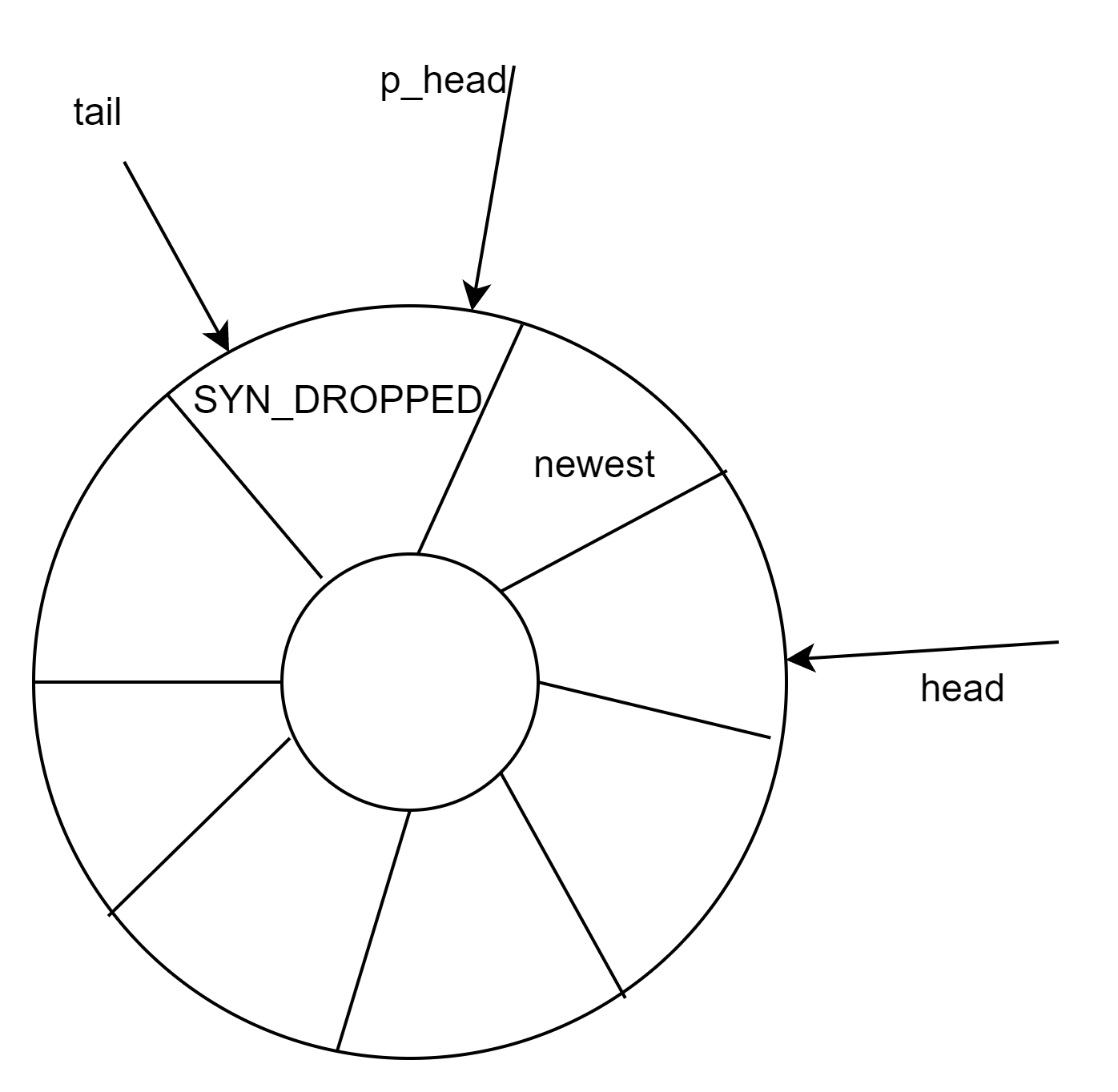
图3 环形缓冲区满时的处理
6,环形缓冲区的消费者
用户程序作为消费者,通过read()函数读取input设备节点时,最终在内核调用evdev_fetch_next_event()函数从环形缓冲区中读取input_event事件:
static ssize_t evdev_read(struct file *file, char __user *buffer,
size_t count, loff_t *ppos)
{
struct evdev_client *client = file->private_data;
struct evdev *evdev = client->evdev;
struct input_event event;
size_t read = 0;
int error;
if (count != 0 && count < input_event_size())
return -EINVAL;
for (;;) {
if (!evdev->exist || client->revoked)
return -ENODEV;
if (client->packet_head == client->tail &&
(file->f_flags & O_NONBLOCK)) //如果ringbuffer 为空且非阻塞的读,立即返回
return -EAGAIN;
/*
* count == 0 is special - no IO is done but we check
* for error conditions (see above).
*/
if (count == 0)
break;
while (read + input_event_size() <= count &&
evdev_fetch_next_event(client, &event)) {
if (input_event_to_user(buffer + read, &event)) //将event传递到userspace
return -EFAULT;
read += input_event_size();
}
if (read)
break;
if (!(file->f_flags & O_NONBLOCK)) { //如果阻塞的读,等待ringbuffer中有数据
error = wait_event_interruptible(client->wait,
client->packet_head != client->tail ||
!evdev->exist || client->revoked);
if (error)
return error;
}
}
return read;
}static int evdev_fetch_next_event(struct evdev_client *client,
struct input_event *event)
{
int have_event;
spin_lock_irq(&client->buffer_lock);
// 判缓冲区中是否有input_event事件
have_event = client->packet_head != client->tail;
if (have_event) {
// 从缓冲区中读取一次input_event事件,队尾tail自增指向下一个元素空间
*event = client->buffer[client->tail++];
client->tail &= client->bufsize - 1;
}
spin_unlock_irq(&client->buffer_lock);
return have_event;
}kernel空间poll()函数的实现:
/* No kernel lock - fine */
static __poll_t evdev_poll(struct file *file, poll_table *wait)
{
struct evdev_client *client = file->private_data;
struct evdev *evdev = client->evdev;
__poll_t mask;
//在等待队列client->wait上睡眠
poll_wait(file, &client->wait, wait);
if (evdev->exist && !client->revoked)
mask = EPOLLOUT | EPOLLWRNORM;
else
mask = EPOLLHUP | EPOLLERR;
if (client->packet_head != client->tail)
mask |= EPOLLIN | EPOLLRDNORM;
return mask; //用户空间poll()的返回
}7,kill_fasync()异步通知
阻塞与非阻塞访问、poll函数提供了较好的解决设备访问的机制,但是如果有了异步通知,整套机制则更加完整了。
异步通知的意思是:一旦设备就绪,则主动通知应用程序,这样应用程序根本就不需要查询设备状态,这一点非常类似于硬件上“中断”的概念,比较准确的称谓是“信号驱动的异步I/O”。信号是在软件层次上对中断机制的一种模拟,在原理上,一个进程收到一个信号与处理器收到一个中断请求可以说是一样的。信号是异步的,一个进程不必通过任何操作来等待信号的到达,事实上,进程也不知道信号到底什么时候到达。
阻塞I/O意味着一直等待设备可访问后再访问,非阻塞I/O中使用poll()意味着查询设备是否可访问,而异步通知则意味着设备通知用户自身可访问,之后用户再进行I/O处理。由此可见,这几种I/O方式可以相互补充。
使用kill_fasync()异步通知实现按键处理:
应用层
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <stdio.h>
#include <poll.h>
#include <signal.h>
#include <sys/types.h>
#include <unistd.h>
#include <fcntl.h>
/* fifthdrvtest
*/
int fd;
//信号处理函数
void my_signal_fun(int signum)
{
unsigned char key_val;
read(fd, &key_val, 1);
printf("key_val: 0x%x\n", key_val);
}
int main(int argc, char **argv)
{
unsigned char key_val;
int ret;
int Oflags;
//在应用程序中捕捉SIGIO信号(由驱动程序发送)
signal(SIGIO, my_signal_fun);
fd = open("/dev/buttons", O_RDWR);
if (fd < 0)
{
printf("can't open!\n");
}
//将当前进程PID设置为fd文件所对应驱动程序将要发送SIGIO,SIGUSR信号进程PID
fcntl(fd, F_SETOWN, getpid());
//获取fd的打开方式
Oflags = fcntl(fd, F_GETFL);
//将fd的打开方式设置为FASYNC --- 即 支持异步通知
//该行代码执行会触发 驱动程序中 file_operations->fasync 函数 ------fasync函数调用fasync_helper初始化一个fasync_struct结构体,该结构体描述了将要发送信号的进程PID (fasync_struct->fa_file->f_owner->pid)
fcntl(fd, F_SETFL, Oflags | FASYNC);
while (1)
{
sleep(1000);
}
return 0;
}驱动层
#include <linux/module.h>
#include <linux/kernel.h>
#include <linux/fs.h>
#include <linux/init.h>
#include <linux/delay.h>
#include <linux/irq.h>
#include <asm/uaccess.h>
#include <asm/irq.h>
#include <asm/io.h>
#include <asm/arch/regs-gpio.h>
#include <asm/hardware.h>
#include <linux/poll.h>
static struct class *fifthdrv_class;
static struct class_device *fifthdrv_class_dev;
//volatile unsigned long *gpfcon;
//volatile unsigned long *gpfdat;
static DECLARE_WAIT_QUEUE_HEAD(button_waitq);
/* 中断事件标志, 中断服务程序将它置1,fifth_drv_read将它清0 */
static volatile int ev_press = 0;
static struct fasync_struct *button_async;
struct pin_desc{
unsigned int pin;
unsigned int key_val;
};
/* 键值: 按下时, 0x01, 0x02, 0x03, 0x04 */
/* 键值: 松开时, 0x81, 0x82, 0x83, 0x84 */
static unsigned char key_val;
/*
* K1,K2,K3,K4对应GPG0,GPG3,GPG5,GPG6
*/
struct pin_desc pins_desc[4] = {
{S3C2410_GPG0, 0x01},
{S3C2410_GPG3, 0x02},
{S3C2410_GPG5, 0x03},
{S3C2410_GPG6, 0x04},
};
/*
* 确定按键值
*/
static irqreturn_t buttons_irq(int irq, void *dev_id)
{
struct pin_desc * pindesc = (struct pin_desc *)dev_id;
unsigned int pinval;
pinval = s3c2410_gpio_getpin(pindesc->pin);
if (pinval)
{
/* 松开 */
key_val = 0x80 | pindesc->key_val;
}
else
{
/* 按下 */
key_val = pindesc->key_val;
}
ev_press = 1; /* 表示中断发生了 */
wake_up_interruptible(&button_waitq); /* 唤醒休眠的进程 */
//发送信号SIGIO信号给fasync_struct 结构体所描述的PID,触发应用程序的SIGIO信号处理函数
kill_fasync (&button_async, SIGIO, POLL_IN);
return IRQ_RETVAL(IRQ_HANDLED);
}
static int fifth_drv_open(struct inode *inode, struct file *file)
{
/* GPG0,GPG3,GPG5,GPG6为中断引脚: EINT8,EINT11,EINT13,EINT14 */
request_irq(IRQ_EINT8, buttons_irq, IRQT_BOTHEDGE, "K1", &pins_desc[0]);
request_irq(IRQ_EINT11, buttons_irq, IRQT_BOTHEDGE, "K2", &pins_desc[1]);
request_irq(IRQ_EINT13, buttons_irq, IRQT_BOTHEDGE, "K3", &pins_desc[2]);
request_irq(IRQ_EINT14, buttons_irq, IRQT_BOTHEDGE, "K4", &pins_desc[3]);
return 0;
}
ssize_t fifth_drv_read(struct file *file, char __user *buf, size_t size, loff_t *ppos)
{
if (size != 1)
return -EINVAL;
/* 如果没有按键动作, 休眠 */
wait_event_interruptible(button_waitq, ev_press);
/* 如果有按键动作, 返回键值 */
copy_to_user(buf, &key_val, 1);
ev_press = 0;
return 1;
}
int fifth_drv_close(struct inode *inode, struct file *file)
{
free_irq(IRQ_EINT8, &pins_desc[0]);
free_irq(IRQ_EINT11, &pins_desc[1]);
free_irq(IRQ_EINT13, &pins_desc[2]);
free_irq(IRQ_EINT14, &pins_desc[3]);
return 0;
}
static unsigned fifth_drv_poll(struct file *file, poll_table *wait)
{
unsigned int mask = 0;
poll_wait(file, &button_waitq, wait); // 不会立即休眠
if (ev_press)
mask |= POLLIN | POLLRDNORM;
return mask;
}
static int fifth_drv_fasync (int fd, struct file *filp, int on)
{
printk("driver: fifth_drv_fasync\n");
//初始化/释放 fasync_struct 结构体 (fasync_struct->fa_file->f_owner->pid)
return fasync_helper (fd, filp, on, &button_async);
}
static struct file_operations sencod_drv_fops = {
.owner = THIS_MODULE, /* 这是一个宏,推向编译模块时自动创建的__this_module变量 */
.open = fifth_drv_open,
.read = fifth_drv_read,
.release = fifth_drv_close,
.poll = fifth_drv_poll,
.fasync = fifth_drv_fasync,
};
int major;
static int fifth_drv_init(void)
{
major = register_chrdev(0, "fifth_drv", &sencod_drv_fops);
fifthdrv_class = class_create(THIS_MODULE, "fifth_drv");
fifthdrv_class_dev = class_device_create(fifthdrv_class, NULL, MKDEV(major, 0), NULL, "buttons"); /* /dev/buttons */
// gpfcon = (volatile unsigned long *)ioremap(0x56000050, 16);
// gpfdat = gpfcon + 1;
return 0;
}
static void fifth_drv_exit(void)
{
unregister_chrdev(major, "fifth_drv");
class_device_unregister(fifthdrv_class_dev);
class_destroy(fifthdrv_class);
// iounmap(gpfcon);
return 0;
}
module_init(fifth_drv_init);
module_exit(fifth_drv_exit);
MODULE_LICENSE("GPL");参考链接:















 730
730











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









