






摘要
本文描述8541E芯片适配OpenHarmony的整体方案。
本文描述的整体方案,不止适用于8541e,也适用于该芯片厂家的其他芯片,如7863、7885,少部分子系统会略有差异。
整体方案架构
整体方案架构如下图,遵循OpenHarmony系统架构,在内核及HAL层与8541E芯片原厂SDK对接。
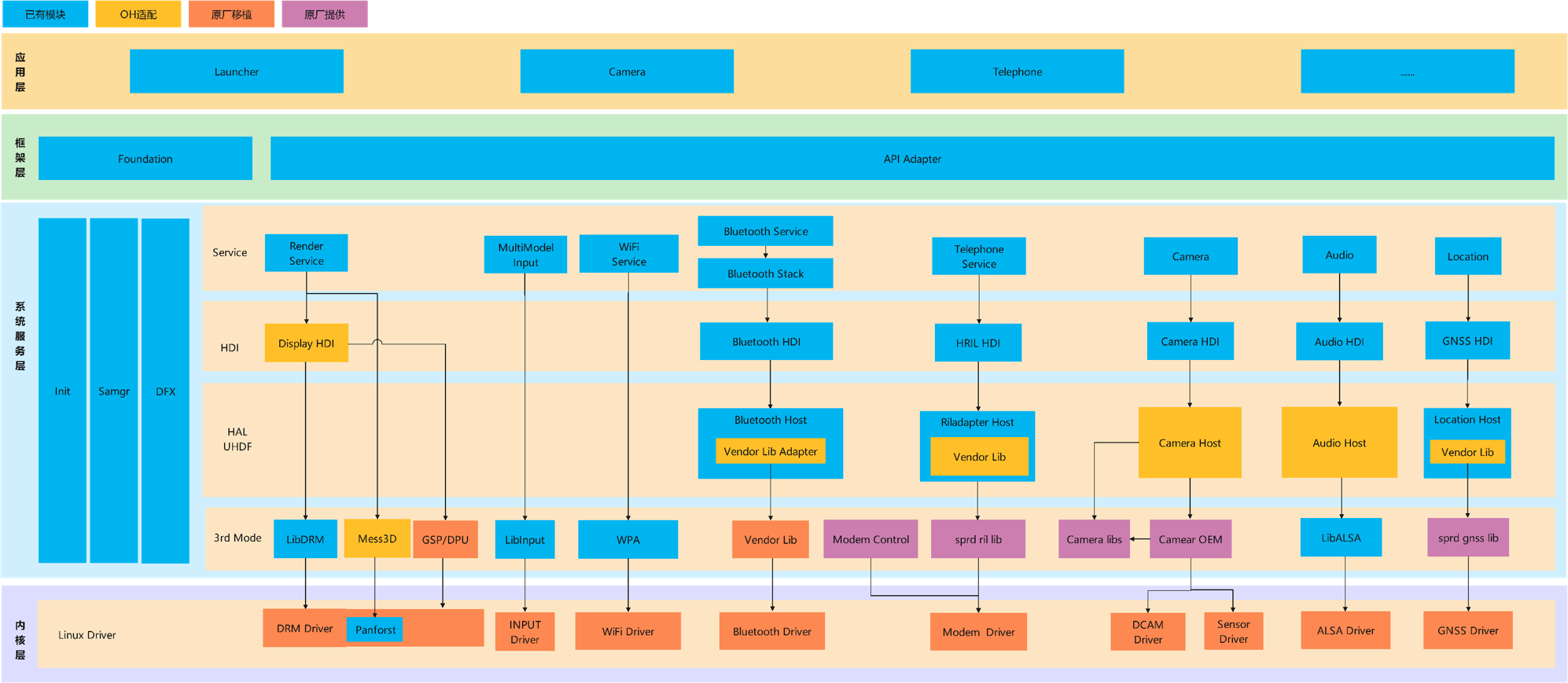
下文基于该方案架构,进一步阐述各子系统的对接方案。
内核子系统
首先需要确定使用哪个内核,这个问题影响大,影响各模块的适配方案,需要优先确定。一般,内核适配有两种策略:
策略1、使用原厂内核版本,打上OpenHarmony内核补丁;
策略2、使用OpenHarmony内核,移植原厂内核SDK中的修改代码,主要包括各种驱动。
因为原厂8541e内核是4.14版本,比较老,原厂没有基于该内核的闭源GPU方案可用于OpenHarmony系统,需要我们选用开源GPU来支撑芯片商用,而开源GPU的驱动Panfrost依赖5.x内核版本。
因此,我们选择策略2:使用OpenHarmony 5.10内核,然后从原厂4.14内核中移植各个模块的驱动到OpenHarmony 5.10内核上。
对于原厂其他芯片,根据原厂SDK的内核版本不同,这里可以采用不同的策略。
系统启动
如何使OpenHarmony正确启动,涉及的子系统有启动子系统、编译子系统、内核子系统等。
首先,内核要能正常启动,这部分涉及编译添加芯片和产品,编译出boot、ramdisk等相关image,还涉及BootLoader、bootargs、dts等修改;另外,内核要集成编译HDF框架,确保后续其他模块能正常启动。
然后,让内核能够正常启动ramdisk,启动后,在分区配置文件fstab中,要配置OpenHarmony的各个系统分区system、vendor、data的正确mount参数。
然后,init cfg中各个配置要正确。
然后,启动samgr、appswapn、softbus、foundation等后台程序,以及启动launcher、systemui等应用程序,这过程依赖内核要开启Access token、Binder、HDF等关键配置,这些关键配置可提前识别并打开。
最后,确保能正常启动到Launcher。
启动这部分与所有L2标准产品一致,不详细展开。
图形子系统
图形的适配,分为3大部分:图形基础、渲染、合成,因为这3部分的底层驱动和适配路径都不一样,因此分开阐述。
图形基础部分
OpenHarmony的图形子系统,支持对接DRM和FB两种模型的图形驱动。
各大厂商的富设备,大都已支持DRM驱动模型,8541E芯片也是如此,支持DRM图形驱动模型。
因此,我们在OpenHarmony Display HDI层采用DRM模型对接8541e图形驱动,准确的讲,是Display HDI通过DRM用户态接口库LibDRM对接8541e的DRM驱动。
主要工作有:
1、移植8541e DRM及相关的显示屏驱动,从4.14内核从5.10内核。
2、Display HDI接口适配。OpenHarmony社区代码已有RK3568的DRM适配示例,参考示例,结合8541e DRM驱动,调整各适配接口和参数。
为确保各部分工作是高质量完成的,从下到上可分步调试:
步骤1、使用ModeTest调试出图。当内核移植完之后,确保ModeTest正常可以获取DRM参数,可以显示界面。
步骤2、使用hello_composer调试出图。hello_composer是基于Display HDI接口的调试程序,在ModeTest出图正常之后,完成Display HDI接口适配,然后使用该程序调试Display HDI接口,确保HDI接口适配正确。
步骤3、显示OpenHarmony桌面。当hello_composer调试出图正常后,如果Launcher应用程序也正常启动,一般就可以显示OpenHarmony桌面;如果没有显示,一般是系统或者Launcher启动的问题。
渲染部分
各种不同方案的GPU库,都会提供Open GL和EGL接口,供上层渲染框架使用。OpenHarmony的渲染框架上也是使用Open GL和EGL接口。
因为不能使用闭源库,我们需要使用开源GPU mesa3D编译提供的OpenGL库。
开源GPU驱动为Mesa3D,Mesa3D是用户态库,在内核态需要配套使用Panfrost驱动。
OpenHarmony 3.2版本,已经提供了快速集成编译开源GPU的方法,相比3.1Release版本,适配过程已有很大简化,具体方法也不在此赘述。
更需要注意的是,8541e使用的是GPU是Mail T820,GPU架构比较老,不仅开源GPU Mesa3D的适配会有问题,而且OpenHarmony XTS认证也会有问题。因为,Mail T820与Mesa3D的组合,并没有通过OpenGL CTS测试;而OpenHarmony3.2版本的XTS会测试OpenGL CTS的满足度;当出现相关XTS问题的时候,需要去分析澄清。
合成部分
默认没有适配的情况下,采用CPU合成,合成效率很低,一帧需要80~100ms,帧率才10几。好在8541e芯片提供了专门的硬件GSP和DPU来提高合成效率,同时GPU也可以承担一部分合成工作,因此需要把硬件合成用起来,提高流畅度等使用体验。
主要方案是:使用GSP+DPU+GPU组合起来进行硬件合成。GSP、DPU、GPU的适用场景不同,比如当图层数目大于4的时候,或者在旋转的时候,需要使用GSP。在8541e上,dpu也不够强大,部分场景还需要GPU来合成。
主要工作:
1、移植GSP、DPU驱动
2、适配合成HDI接口,根据情况合理使用GSP、DPU、GPU进行合成。
需要注意的是:使用GSP或者DPU合成时,可以调用GSP、DPU的用户态程序接口,而使用GPU合成时,不能直接调用接口,而是设置GPU合成标志,让流程重新走回渲染,在渲染阶段调用GPU完成合成工作。
多模输入子系统
OpenHarmony采用udev管理输入设备节点,确保udev的输入规则集/etc/udev/rules.d/touchscreen.rules中,有规则与内核驱动的输入设备属性能匹配上,一般默认都有,不需要适配什么。
移植4.14的8541e输入驱动,确保内核驱动能将输入事件正确记录到dev设备节点。
WiFi
主要移植内核驱动,系统已对接好wpa,没有多少适配工作 。
Bluetooth
芯片厂家在hal层有提供vendor lib,将Bluetooth HDI接口对接到vendor lib即可。
由于芯片厂家vendor lib提供的接口,与OpenHarmony Bluetooth HDI需要的接口,不完全一致,需要修改。
社区提供的rk3568示例,是直接修改了芯片厂家的vendor lib库,让能够直接对接OpenHarmony Bluetooth HDI,但这样不利于各自独立演进,当后续芯片厂家的vendor lib库需要升级时,会产生较大的维护工作量。
我们采用的是增加vendor lib的adapter层,在adapter层去做接口转换,保障OpenHarmony Bluetooth和厂家的vendor lib能各自独立演进。
电话子系统
8541内置了Modem芯片,支持4G能力。
OpenHarmony的电话子系统,在HAL层的RIL适配部件采用的是hril_hdf、hril、vendorlib三层架构(如下图),适配不同的芯片或者外接模组主要在vendorlib层进行对接。
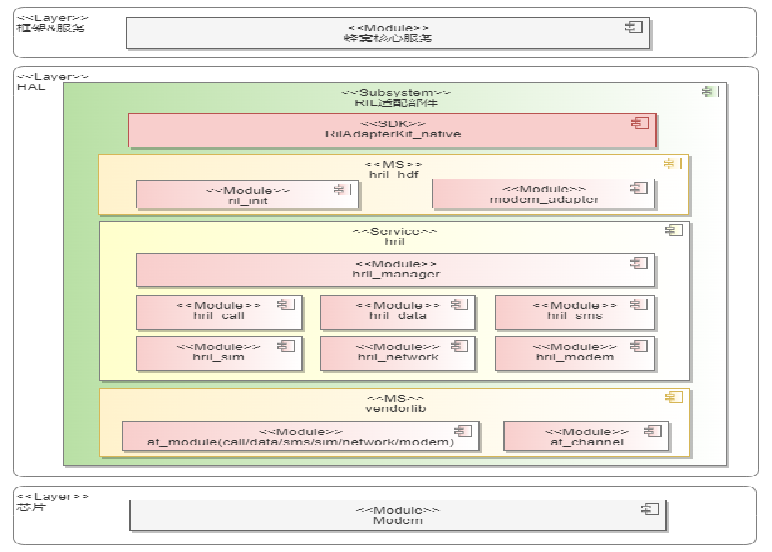
OpenHarmony社区示例产品rk3568,在vendorlib层对接了外接模组的at指令,但这种适配方案不适合8541等ZR芯片。
芯片厂家的8541e Modem方案中,有自己的rild程序,已经完整的实现了ril层功能,我们不需要再从最底层AT去适配重新去造一个ril,使用厂家的ril程序质量上也更有保障。
因此,整体方案为:rild改造为ril lib闭源库,OpenHarmony RIL适配部件在vendorlib对接厂家ril lib,摒弃原来的AT实现方式。
具体方案如下图:
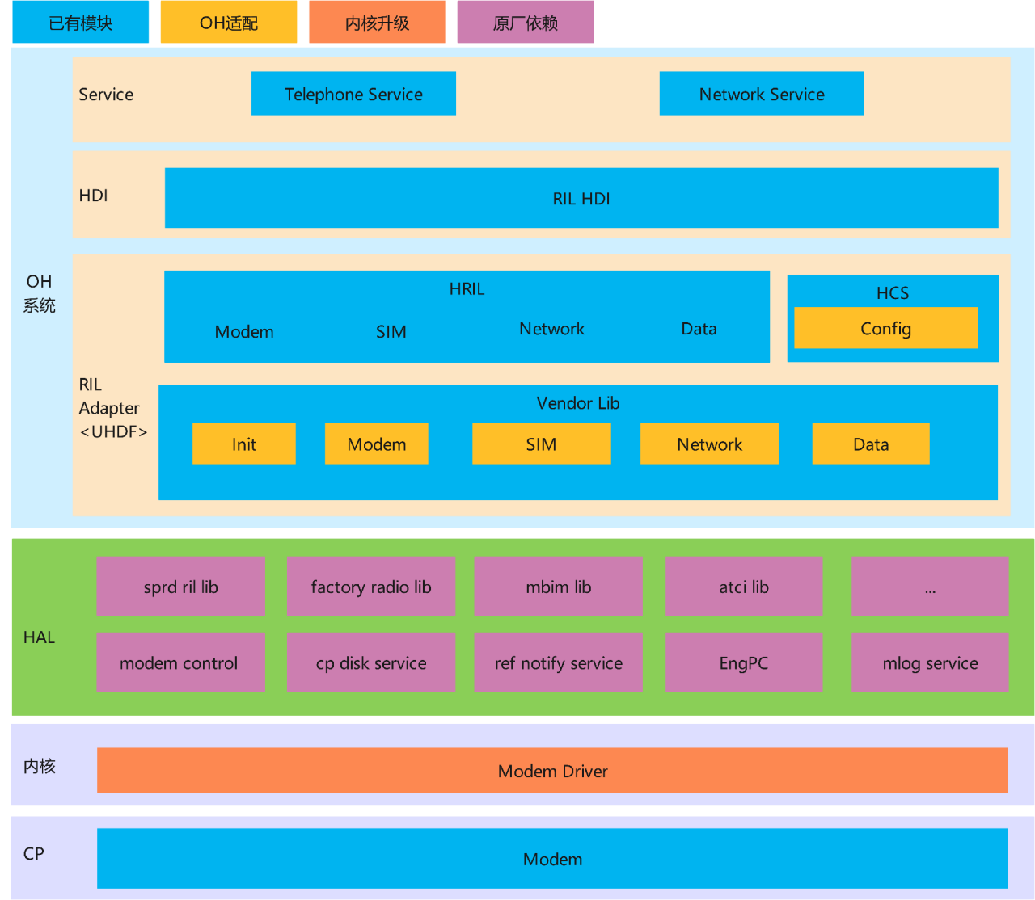
关键工作有:
1、内核驱动移植
2、集成原厂闭源二进制程序和闭源库
2.1 保留原厂modem control、cp disk、ref notify等原生二进制程序。
2.2 改造rild程序为ril lib闭源库
3、OH适配
3.1 OH启动时拉起原厂二进制程序,使能和配置好Modem。
3.2 实现Vendor Lib,适配对接sprd ril lib
在Vendor Lib中需要逐个适配各指令接口,包括下发和主动上报接口;仅数据功能,就有60+接口。
接口传递的数据结构差异较大,需要在适配层转换,部分缺失的信息需要sprd ril lib中补充;
部分逻辑需要修改,指令异步机制,指令时序不一样,等等。
4、HCS根据设备能力和业务需求进行配置
Camera
OpenHarmony的Camera驱动框架也是多层架构,对上提供HDI接口,对下兼容不同平台实现。
在Platform Adatper层,提供了MPP和V4L2两种架构的对接方案,社区上Hisi产品采用MPP架构,其他大部分产品采用Linux标准的V4L2架构。
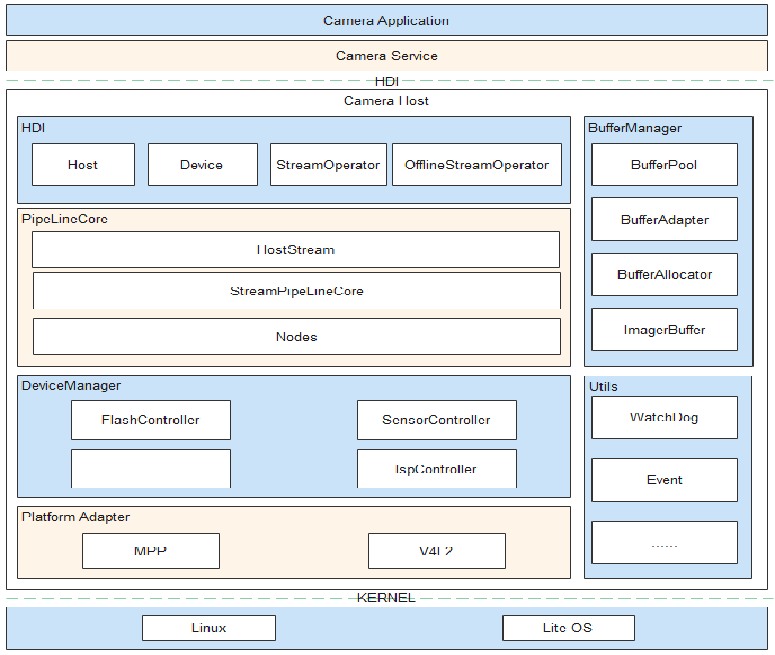
8541e原厂的Camera驱动,并没有使用标准的V4L2,主要是由用户态的Unisoc Camera OEM子系统实现,里面包括大量的闭源部分和大量的有源码部分。
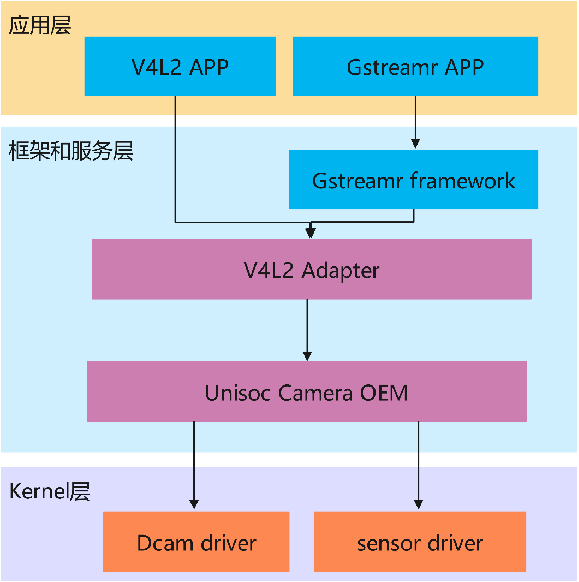
但基于Unisoc Camera OEM,可以封装提供“仿冒的”V4L2接口(原厂有类似样例),这让双方在不破坏各自架构的前提下,有了快速对接的可能性。
最终对接方案如下:
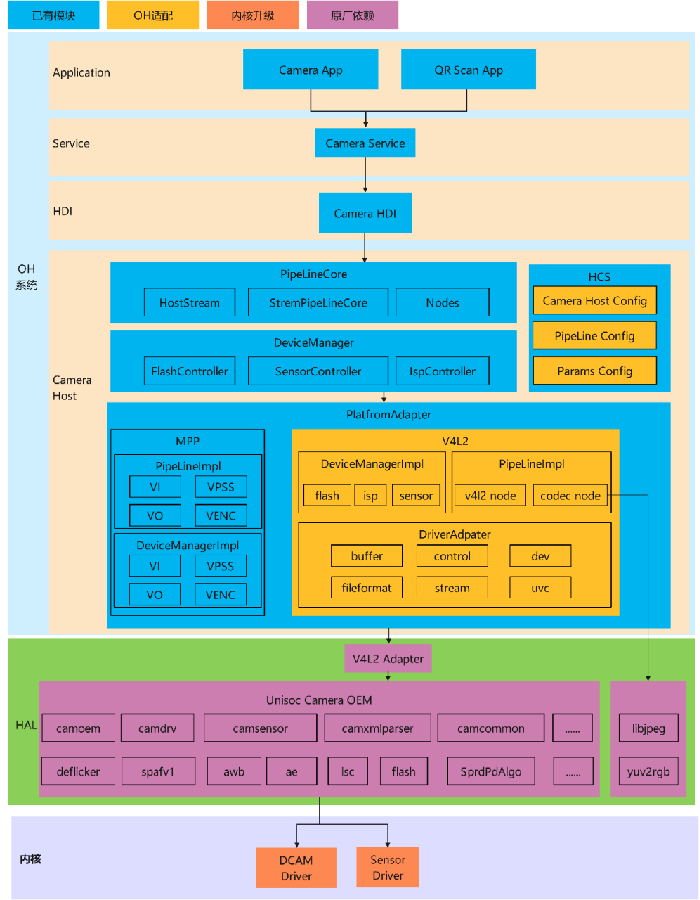
关键点有:
1、内核Kernel移植。包括DCAM驱动和Sensor驱动。
2、集成原厂闭源库。包括3a算法在类的10+个闭源库。
3、开源库移植。包括Unisoc Camera OEM接口、sensor接口等15+个开源库,涉及源码75万行以上。
4、OH适配。在Platform Adapter选用V4L2模型,对接厂家适配库V4L2 Adapter,但需要改造V4L2模型的适配源码。
4.1 修改使用原厂API接口来实现,不再使用Linux V4L2设备节点;
4.2 同时,修改适配原厂闭源库逻辑,比如取buffer的方式、设备匹配的方式,等等。
4.3 Sensor修改 Codec转码使用厂家硬件转码库,如libjpeg,来提升性能。
4.4 HCS根据设备能力和业务需求进行配置
Audio
原厂SDK支持ALSA框架,OpenHarmony也支持对接ALSA框架,因此基于libalsa三方库来进行对接。
位置子系统GNSS
与OpenHarmony部分子系统类似,GNSS驱动框架也是多层分离的架构,对上提供统一的HDI接口,对下预留了vendorlib做不用芯片的适配。
GNSS驱动框架按功能可以分为三部分:gnss(基础定位)、agnss(辅助定位)、geofence(地理围栏),每部分可以单独与vendorlib对接。
8541e采用vendorlib来适配对接芯片厂家的vendorlib,主要完成了gnss基础定位功能的适配对接,agnss辅助定位和地理围栏的适配对接方法类似。
主要工作有:
1、移植gnss驱动
2、集成原厂gnss闭源库
3、实现vendorlib,对接原厂闭源库















 4244
4244

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









