







我一直认为作为一个在linux下工作的C程序员,若对内存有深刻的认识,不但程序的性能会更高,运行更稳定,编程速度也会更快。反之亦有相反的效果,有时一些内存错误让你摸不着头脑,不但大大降低开发速度,开发出来的软件稳定性也值得怀疑。
为了提高组员的编程水平,去年我制定了一系列的培训计划,并负责主讲部分重要课程,其中基础类课程中,有一堂关于内存的课程。当时的讲稿写得很粗略,后来的新同事说看不明白,我决定重新整理一下,放在BLOG,希望对新手有所帮助。
至于文章的标题,基本上是为了搞笑。最近重温星爷经典《大内密探零零发》,这是以大内高手作为文章的标题原因之一。另外也可以这样理解,内指内存,至于大字,修饰内存指其容量大,修饰内存高手形容水平很高,两种理解都可以。
其中包括下列文章:
1. 大内高手—内存模型
单线程模型
多线程模型
2. 大内高手—栈/堆
backtrace的实现
alloca的实现
可变参数的实现。
malloc/free系列函数简介
new/delete系列操作符简介
3. 大内高手—全局内存
.bss说明
.data说明
.rodata说明
violatile关键字说明
static关键字说明
const 关键字说明
4. 大内高手—内存分配算法
标准C(glibc)分配算法
STL(STLPort)分配算法
OS内部分配算法(伙伴/SLAB)
5. 大内高手—惯用手法
引用计数
预先分配
内存池
会话池
…
6. 大内高手—共享内存与线程局部存储
7. 大内高手—自动内存回收机制
8. 大内高手—常见内存错误
9. 大内高手—常用调试工具
大内高手—内存模型
了解linux的内存模型,或许不能让你大幅度提高编程能力,但是作为一个基本知识点应该熟悉。坐火车外出旅行时,即时你对沿途的地方一无所知,仍然可以到达目标地。但是你对整个路途都很比较清楚的话,每到一个站都知道自己在哪里,知道当地的风土人情,对比一下所见所想,旅程可能更有趣一些。
类似的,了解linux的内存模型,你知道每块内存,每个变量,在系统中处于什么样的位置。这同样会让你心情愉快,知道这些,有时还会让你的生活轻更松些。看看变量的地址,你可以大致断定这是否是一个有效的地址。一个变量被破坏了,你可以大致推断谁是犯罪嫌疑人。
Linux的内存模型,一般为:
| 地址 | 作用 | 说明 |
| >=0xc000 0000 | 内核虚拟存储器 | 用户代码不可见区域 |
| <0xc000 0000 | Stack(用户栈) | ESP指向栈顶 |
|
| ↓
↑ |
空闲内存 |
| >=0x4000 0000 | 文件映射区 |
|
| <0x4000 0000 |
↑ |
空闲内存
|
|
| Heap(运行时堆) | 通过brk/sbrk系统调用扩大堆,向上增长。 |
|
| .data、.bss(读写段) | 从可执行文件中加载 |
| >=0x0804 8000 | .init、.text、.rodata(只读段) | 从可执行文件中加载 |
| <0x0804 8000 | 保留区域 |
|
很多书上都有类似的描述,本图取自于《深入理解计算机系统》p603,略做修改。本图比较清析,很容易理解,但仍然有两点不足。下面补充说明一下:
1. 第一点是关于运行时堆的。
为说明这个问题,我们先运行一个测试程序,并观察其结果:
| #include <stdio.h>
int main(int argc, char* argv[]) { int first = 0; int* p0 = malloc(1024); int* p1 = malloc(1024 * 1024); int* p2 = malloc(512 * 1024 * 1024 ); int* p3 = malloc(1024 * 1024 * 1024 ); printf("main=%p print=%p\n", main, printf); printf("first=%p\n", &first); printf("p0=%p p1=%p p2=%p p3=%p\n", p0, p1, p2, p3);
getchar();
return 0; }
|
运行后,输出结果为:
main=0x8048404 print=0x8048324
first=0xbfcd1264
p0=0x9253008 p1=0xb7ec0008 p2=0x97ebf008 p3=0x57ebe008
l main和print两个函数是代码段(.text)的,其地址符合表一的描述。
l first是第一个临时变量,由于在first之前还有一些环境变量,它的值并非0xbfffffff,而是0xbfcd1264,这是正常的。
l p0是在堆中分配的,其地址小于0x4000 0000,这也是正常的。
l 但p1和p2也是在堆中分配的,而其地址竟大于0x4000 0000,与表一描述不符。
原因在于:运行时堆的位置与内存管理算法相关,也就是与malloc的实现相关。关于内存管理算法的问题,我们在后继文章中有详细描述,这里只作简要说明。在glibc实现的内存管理算法中,Malloc小块内存是在小于0x4000 0000的内存中分配的,通过brk/sbrk不断向上扩展,而分配大块内存,malloc直接通过系统调用mmap实现,分配得到的地址在文件映射区,所以其地址大于0x4000 0000。
从maps文件中可以清楚的看到一点:
| 00514000-00515000 r-xp 00514000 00:00 0 00624000-0063e000 r-xp 00000000 03:01 718192 /lib/ld-2.3.5.so 0063e000-0063f000 r-xp 00019000 03:01 718192 /lib/ld-2.3.5.so 0063f000-00640000 rwxp 0001a000 03:01 718192 /lib/ld-2.3.5.so 00642000-00766000 r-xp 00000000 03:01 718193 /lib/libc-2.3.5.so 00766000-00768000 r-xp 00124000 03:01 718193 /lib/libc-2.3.5.so 00768000-0076a000 rwxp 00126000 03:01 718193 /lib/libc-2.3.5.so 0076a000-0076c000 rwxp 0076a000 00:00 0 08048000-08049000 r-xp 00000000 03:01 1307138 /root/test/mem/t.exe 08049000-0804a000 rw-p 00000000 03:01 1307138 /root/test/mem/t.exe 09f5d000-09f7e000 rw-p 09f5d000 00:00 0 [heap] 57e2f000-b7f35000 rw-p 57e2f000 00:00 0 b7f44000-b7f45000 rw-p b7f44000 00:00 0 bfb2f000-bfb45000 rw-p bfb2f000 00:00 0 [stack] |
2. 第二是关于多线程的。
现在的应用程序,多线程的居多。表一所描述的模型无法适用于多线程环境。按表一所述,程序最多拥有上G的栈空间,事实上,在多线程情况下,能用的栈空间是非常有限的。为了说明这个问题,我们再看另外一个测试:
| #include <stdio.h> #include <pthread.h>
void* thread_proc(void* param) { int first = 0; int* p0 = malloc(1024); int* p1 = malloc(1024 * 1024);
printf("(0x%x): first=%p\n", pthread_self(), &first); printf("(0x%x): p0=%p p1=%p \n", pthread_self(), p0, p1);
return 0; }
#define N 5 int main(int argc, char* argv[]) { int first = 0; int i= 0; void* ret = NULL; pthread_t tid[N] = {0};
printf("first=%p\n", &first); for(i = 0; i < N; i++) { pthread_create(tid+i, NULL, thread_proc, NULL); }
for(i = 0; i < N; i++) { pthread_join(tid[i], &ret); }
return 0; }
|
运行后,输出结果为:
first=0xbfd3d35c
(0xb7f2cbb0): first=0xb7f2c454
(0xb7f2cbb0): p0=0x84d52d8 p1=0xb4c27008
(0xb752bbb0): first=0xb752b454
(0xb752bbb0): p0=0x84d56e0 p1=0xb4b26008
(0xb6b2abb0): first=0xb6b2a454
(0xb6b2abb0): p0=0x84d5ae8 p1=0xb4a25008
(0xb6129bb0): first=0xb6129454
(0xb6129bb0): p0=0x84d5ef0 p1=0xb4924008
(0xb5728bb0): first=0xb5728454
(0xb5728bb0): p0=0x84d62f8 p1=0xb7e2c008
我们看一下:
主线程与第一个线程的栈之间的距离:0xbfd3d35c - 0xb7f2c454=0x7e10f08=126M
第一个线程与第二个线程的栈之间的距离:0xb7f2c454 - 0xb752b454=0xa01000=10M
其它几个线程的栈之间距离均为10M。
也就是说,主线程的栈空间最大为126M,而普通线程的栈空间仅为10M,超这个范围就会造成栈溢出。
栈溢出的后果是比较严重的,或者出现Segmentation fault错误,或者出现莫名其妙的错误。
大内高手—栈/堆
l 栈
栈作为一种基本数据结构,我并不感到惊讶,用来实现函数调用,这也司空见惯的作法。直到我试图找到另外一种方式实现递归操作时,我才感叹于它的巧妙。要实现递归操作,不用栈不是不可能,而是找不出比它更优雅的方式。
尽管大多数编译器在优化时,会把常用的参数或者局部变量放入寄存器中。但用栈来管理函数调用时的临时变量(局部变量和参数)是通用做法,前者只是辅助手段,且只在当前函数中使用,一旦调用下一层函数,这些值仍然要存入栈中才行。
通常情况下,栈向下(低地址)增长,每向栈中PUSH一个元素,栈顶就向低地址扩展,每从栈中POP一个元素,栈顶就向高地址回退。一个有兴趣的问题:在x86平台上,栈顶寄存器为ESP,那么ESP的值在是PUSH操作之前修改呢,还是在PUSH操作之后修改呢?PUSH ESP这条指令会向栈中存入什么数据呢?据说x86系列CPU中,除了286外,都是先修改ESP,再压栈的。由于286没有CPUID指令,有的OS用这种方法检查286的型号。
一个函数内的局部变量以及其调用下一级函数的参数,所占用的内存空间作为一个基本的单元,称为一个帧(frame)。在gdb里,f 命令就是用来查看指定帧的信息的。在两个frame之间通过还存有其它信息,比如上一层frame的分界地址(EBP)等。
关于栈的基本知识,就先介绍这么多,我们下面来看看一些关于栈的技巧及应用:
1. backtrace的实现
callstack调试器的基本功能之一,利用此功能,你可以看到各级函数的调用关系。在gdb中,这一功能被称为backtrace,输入bt命令就可以看到当前函数的callstack。它的实现多少有些有趣,我们在这里研究一下。
我们先看看栈的基本模型
堆
有人可能会说,全局内存就是全局变量嘛,有必要专门一章来介绍吗?这么简单的东西,还能玩出花来?我从来没有深究它,不一样写程序吗?关于全局内存这个主题虽然玩不出花来,但确实有些重要,了解这些知识,对于优化程序的时间和空间很有帮助。因为有好几次这样经历,我才决定花一章篇幅来介绍它。
正如大家所知道的,全局变量是放在全局内存中的,但反过来却未必成立。用static修饰的局部变量就是放在放全局内存的,它的作用域是局部的,但生命期是全局的。在有的嵌入式平台中,堆实际上就是一个全局变量,它占用相当大的一块内存,在运行时,把这块内存进行二次分配。
这里我们并不强调全局变量和全局内存的差别。在本文中,全局强调的是它的生命期,而不是它的作用域,所以有时可能把两者的概念互换。
一般来说,在一起定义的两个全局变量,在内存的中位置是相邻的。这是一个简单的常识,但有时挺有用,如果一个全局变量被破坏了,不防先查查其前后相关变量的访问代码,看看是否存在越界访问的可能。
在ELF格式的可执行文件中,全局内存包括三种:bss、data和rodata。其它可执行文件格式与之类似。了解了这三种数据的特点,我们才能充分发挥它们的长处,达到速度与空间的最优化。
1. bss
已经记不清bss代表Block Storage Start还是Block Started by Symbol。像这我这种没有用过那些史前计算机的人,终究无法明白这样怪异的名字,也就记不住了。不过没有关系,重要的是,我们要清楚bss全局变量有什么样特点,以及如何利用它。
通俗的说,bss是指那些没有初始化的和初始化为0的全局变量。它有什么特点呢,让我们来看看一个小程序的表现。
| int bss_array[1024 * 1024] = {0};
int main(int argc, char* argv[]) { return 0; } |
[root@localhost bss]# gcc -g bss.c -o bss.exe
[root@localhost bss]# ll
total 12
-rw-r--r-- 1 root root 84 Jun 22 14:32 bss.c
-rwxr-xr-x 1 root root 5683 Jun 22 14:32 bss.exe
变量bss_array的大小为4M,而可执行文件的大小只有5K。 由此可见,bss类型的全局变量只占运行时的内存空间,而不占文件空间。
另外,大多数操作系统,在加载程序时,会把所有的bss全局变量全部清零,无需要你手工去清零。但为保证程序的可移植性,手工把这些变量初始化为0也是一个好习惯。
2. data
与bss相比,data就容易明白多了,它的名字就暗示着里面存放着数据。当然,如果数据全是零,为了优化考虑,编译器把它当作bss处理。通俗的说,data指那些初始化过(非零)的非const的全局变量。它有什么特点呢,我们还是来看看一个小程序的表现。
| int data_array[1024 * 1024] = {1};
int main(int argc, char* argv[]) { return 0; } |
[root@localhost data]# gcc -g data.c -o data.exe
[root@localhost data]# ll
total 4112
-rw-r--r-- 1 root root 85 Jun 22 14:35 data.c
-rwxr-xr-x 1 root root 4200025 Jun 22 14:35 data.exe
仅仅是把初始化的值改为非零了,文件就变为4M多。由此可见,data类型的全局变量是即占文件空间,又占用运行时内存空间的。
3. rodata
rodata的意义同样明显,ro代表read only,即只读数据(const)。关于rodata类型的数据,要注意以下几点:
l 常量不一定就放在rodata里,有的立即数直接编码在指令里,存放在代码段(.text)中。
l 对于字符串常量,编译器会自动去掉重复的字符串,保证一个字符串在一个可执行文件(EXE/SO)中只存在一份拷贝。
l rodata是在多个进程间是共享的,这可以提高空间利用率。
l 在有的嵌入式系统中,rodata放在ROM(如norflash)里,运行时直接读取ROM内存,无需要加载到RAM内存中。
l 在嵌入式linux系统中,通过一种叫作XIP(就地执行)的技术,也可以直接读取,而无需要加载到RAM内存中。
由此可见,把在运行过程中不会改变的数据设为rodata类型的,是有很多好处的:在多个进程间共享,可以大大提高空间利用率,甚至不占用RAM空间。同时由于rodata在只读的内存页面(page)中,是受保护的,任何试图对它的修改都会被及时发现,这可以帮助提高程序的稳定性。
4. 变量与关键字
static关键字用途太多,以致于让新手模糊。不过,总结起来就有两种作用,改变生命期和限制作用域。如:
l 修饰inline函数:限制作用域
l 修饰普通函数:限制作用域
l 修饰局部变量:改变生命期
l 修饰全局变量:限制作用域
const 关键字倒是比较明了,用const修饰的变量放在rodata里,字符串默认就是常量。对const,注意以下几点就行了。
l 指针常量:指向的数据是常量。如 const char* p = “abc”; p指向的内容是常量 ,但p本身不是常量,你可以让p再指向”123”。
l 常量指针:指针本身是常量。如:char* const p = “abc”; p本身就是常量,你不能让p再指向”123”。
l 指针常量 + 常量指针:指针和指针指向的数据都是常量。const char* const p =”abc”; 两者都是常量,不能再修改。
violatile关键字通常用来修饰多线程共享的全局变量和IO内存。告诉编译器,不要把此类变量优化到寄存器中,每次都要老老实实的从内存中读取,因为它们随时都可能变化。这个关键字可能比较生僻,但千万不要忘了它,否则一个错误让你调试好几天也得不到一点线索。
内存管理器(一)
作为一个C程序员,每天都在和malloc/free/calloc/realloc系列函数打交道。也许和它们混得太熟了,反而忽略了它们的存在,甚至有了三五年的交情,仍然对它们的实现一无所知。相反,一些好奇心未泯的新手,对它们的实现有着浓厚的兴趣。当初正是一个新同事的问题,促使我去研究内存管理算法的实现。
内存管理算法多少有些神秘,我们很少想着去实现自己的内存管理算法,这也难怪:有这样需求的情况并不多。其实,至于内存分配算法的实现,说简单也简单,说复杂也复杂。要写一个简单的,或许半天时间就可以搞掂,而要写一个真正实用的,可能要花上你几周甚至几个月的时间。
malloc和free是两个核心函数,而calloc和realloc之所以存在,完全是为了提高效率的缘故。否则完全可以用malloc和free的组合来模拟它们。
拿calloc函数的实现来说,在32位机上,内存管理器保证内存至少是4字节对齐的,其长度也会扩展到能被4字节整除,那么其清零算法就可以优化。可以一次清零4个字节,这大大提高清零速度。
拿realloc函数的实现来说,如果realloc的指针后面有足够的空间,内存管理器可以直接扩展其大小,而无须拷贝原有内容。当然,新大小比原来还小时,更不拷贝了。相反,通过malloc和free来实现realloc时,两种情况下都要拷贝,效率自然会低不少。
另外还有两个非机标准的,但很常用的函数,也涉及到内存分配:strdup和strndup。这两个函数在linux和win32下都支持,非常方便。这完全可以用malloc来模拟,而且没有性能上的损失。
这里我们主要关注malloc和free两个函数的实现,并以glibc 2.3.5(32位linux) 为例分析。
内存管理器的目标
内存管理器为什么难写?在设计内存管理算法时,要考虑什么因素?管理内存这是内存管理器的功能需求。正如设计其它软件一样,质量需求一样占有重要的地位。分析内存管理算法之前,我们先看看对内存管理算法的质量需求有哪些:
l 最大化兼容性
要实现内存管理器时,先要定义出分配器的接口函数。接口函数没有必要标新立异,而是要遵循现有标准(如POSIX或者Win32),让使用者可以平滑的过度到新的内存管理器上。
l 最大化可移植性
通常情况下,内存管理器要向OS申请内存,然后进行二次分配。所以,在适当的时候要扩展内存或释放多余的内存,这要调用OS提供的函数才行。OS提供的函数则是因平台而异,尽量抽象出平台相关的代码,保证内存管理器的可移植性。
l 浪费最小的空间
内存管理器要管理内存,必然要使用自己一些数据结构,这些数据结构本身也要占内存空间。在用户眼中,这些内存空间毫无疑问是浪费掉了,如果浪费在内存管理器身的内存太多,显然是不可以接受的。
内存碎片也是浪费空间的罪魁祸首,若内存管理器中有大量的内存碎片,它们是一些不连续的小块内存,它们总量可能很大,但无法使用,这也是不可以接受的。
l 最快的速度
内存分配/释放是常用的操作。按着2/8原则,常用的操作就是性能热点,热点函数的性能对系统的整体性能尤为重要。
l 最大化可调性(以适应于不同的情况)
内存管理算法设计的难点就在于要适应用不同的情况。事实上,如果缺乏应用的上下文,是无法评估内存管理算法的好坏的。可以说在任何情况下,专用算法都比通用算法在时/空性能上的表现更优。
为每种情况都写一套内存管理算法,显然是不太合适的。我们不需要追求最优算法,那样代价太高,能达到次优就行了。设计一套通用内存管理算法,通过一些参数对它进行配置,可以让它在特定情况也有相当出色的表现,这就是可调性。
l 最大化局部性(Locality)
大家都知道,使用cache可以提高程度的速度,但很多人未必知道cache使程序速度提高的真正原因。拿CPU内部的cache和RAM的访问速度相比,速度可能相差一个数量级。两者的速度上的差异固然重要,但这并不是提高速度的充分条件,只是必要条件。
另外一个条件是程序访问内存的局部性(Locality)。大多数情况下,程序总访问一块内存附近的内存,把附近的内存先加入到cache中,下次访问cache中的数据,速度就会提高。否则,如果程序一会儿访问这里,一会儿访问另外一块相隔十万八千里的内存,这只会使数据在内存与cache之间来回搬运,不但于提高速度无益,反而会大大降低程序的速度。
因此,内存管理算法要考虑这一因素,减少cache miss和page fault。
l 最大化调试功能
作为一个C/C++程序员,内存错误可以说是我们的噩梦,上一次的内存错误一定还让你记忆犹新。内存管理器提供的调试功能,强大易用,特别对于嵌入式环境来说,内存错误检测工具缺乏,内存管理器提供的调试功能就更是不可或缺了。
l 最大化适应性
前面说了最大化可调性,以便让内存管理器适用于不同的情况。但是,对于不同情况都要去调设置,无疑太麻烦,是非用户友好的。要尽量让内存管理器适用于很广的情况,只有极少情况下才去调设置。
设计是一个多目标优化的过程,有些目标之间存在着竞争。如何平衡这些竞争力是设计的难点之一。在不同的情况下,这些目标的重要性又不一样,所以根本不存在一个最好的内存分配算法。
关于glibc的内存分配器,我们并打算做代码级分析,只谈谈几点有趣的东西:
1. Glibc分配算法概述:
l 小于等于64字节:用pool算法分配。
l 64到512字节之间:在最佳凭配算法分配和pool算法分配中取一种合适的。
l 大于等于512字节:用最佳凭配算法分配。
l 大于等于128K:直接调用OS提供的函数(如mmap)分配。
2. Glibc扩展内存的方式:
l int brk(void *end_data_segment);
本函数用于扩展堆空间(堆空间的定义可参考内存模型一章),用end_data_segment指明堆的结束地址。
l void *sbrk(ptrdiff_t increment);
本函数用于扩展堆空间(堆空间的定义可参考内存模型一章),用increment指定要增加的大小。
l void* mmap(void *start, size_t length, int prot , int flags, int fd, off_t offset);
本函数用于分配大块内存了,如前面所述大于128K的内存。
3. 空指针和零长度内存
l free(NULL)会让程序crash吗?答案是不会,标准C要求free接受空指针,然后什么也不做。
l malloc(0)会分配成功吗?答案是会的,它会返回一块最小内存给你。
4. 对齐与取整
l 内存管理器会保证分配出来的内存地址是对齐的,通常是4或8字节对齐。
l 内存管理器会对要求内存长度取整,让内存长度能被4或8的整除。
5. 已经分配内存的结构
| |
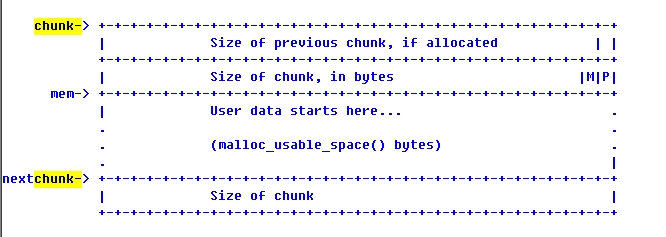
如果前面有一块有效内存块的,则第一个size_t指明前一块内存的大小。
第二个size_t指明自己的大小,同时还指明:自己是不是用mmap分配的(M),前面是否有一个效内存块(P)。你可能觉得奇怪,在32位机上,sizeof(size_t)就是32位,怎么还能留下两个位来保存标志呢?前面我们说了,会对内存长度取整,保证最低2或3bits为0,即是空闲的。
6. 空闲内存的管理
| |
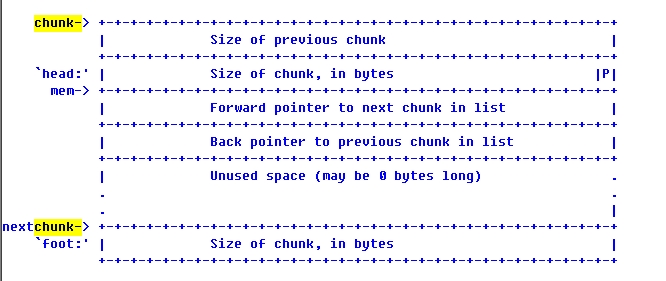
由此可以看出,最小内存块的长度为16字节:
sizeof(size_t) +
sizeof(size_t) +
sizeof(void*) +
sizeof(void*) +
0
这一招非常管用,第一次看到时,感觉简直太巧妙了。这使得无需要额外的内存来管理空闲块,利用空闲块自己,把空闲块强制转换成一个双向链表就行了。
大内高手—共享内存与线程局部存储
城里的人想出去,城外的人想进来。这是《围城》里的一句话,它可能比《围城》本身更加有名。我想这句话的前提是,要么住在城里,要么住在城外,二者只能居其一。否则想住在城里就可以住在城里,想住在城外就可以住在城外,你大可以选择单日住在城里,双日住在城外,也就没有心思去想出去还是进来了。
理想情况是即可以住在城里又可以住在城外,而不是走向极端。尽管像青蛙一样的两栖动物绝不会比人类更高级,但能适应于更多环境的能力毕竟有它的优势。技术也是如此,共享内存和线程局部存储就是实例,它们是为了防止走向内存完全隔离和完全共享两个极端的产物。
当我们发明了MMU时,大家认为天下太平了,各个进程空间独立,互不影响,程序的稳定性将大提高。但马上又认识到,进程完全隔离也不行,因为各个进程之间需要信息共享。于是就搞出一种称为共享内存的东西。
当我们发明了线程的时,大家认为这下可爽了,线程可以并发执行,创建和切换的开销相对进程来说小多了。线程之间的内存是共享的,线程间通信快捷又方便。但马上又认识到,有些信息还是不共享为好,应该让各个线程保留一点隐私。于是就搞出一个线程局部存储的玩意儿。
共享内存和线程局部存储是两个重要又不常用的东西,平时很少用,但有时候又离不了它们。本文介绍将两者的概念、原理和使用方法,把它们放在自己的工具箱里,以供不时之需。
1. 共享内存
大家都知道进程空间是独立的,它们之间互不影响。比如同是0xabcd1234地址的内存,在不同的进程中,它们的数据是不同的,没有关系的。这样做的好处很多:每个进程的地址空间变大了,它们独占4G(32位)的地址空间,让编程实现更容易。各个进程空间独立,一个进程死掉了,不会影响其它进程,提高了系统的稳定性。
要做到进程空间独立,光靠软件是难以实现的,通常要依赖于硬件的帮助。这种硬件通常称为MMU(Memory Manage Unit),即所谓的内存管理单元。在这种体系结构下,内存分为物理内存和虚拟内存两种。物理内存就是实际的内存,你机器上装了多大内存就有多大内存。而应用程序中使用的是虚拟内存,访问内存数据时,由MMU根据页表把虚拟内存地址转换对应的物理内存地址。
MMU把各个进程的虚拟内存映射到不同的物理内存上,这样就保证了进程的虚拟内存是独立的。然而,物理内存往往远远少于各个进程的虚拟内存的总和。怎么办呢,通常的办法是把暂时不用的内存写到磁盘上去,要用的时候再加载回内存中来。一般会搞一个专门的分区保存内存数据,这就是所谓的交换分区。
这些工作由内核配合MMU硬件完成,内存管理是操作系统内核的重要功能。其中为了优化性能,使用了不少高级技术,所以内存管理通常比较复杂。比如:在决定把什么数据换出到磁盘上时,采用最近最少使用的策略,把常用的内存数据放在物理内存中,把不常用的写到磁盘上,这种策略的假设是最近最少使用的内存在将来也很少使用。在创建进程时使用COW(Copy on Write)的技术,大大减少了内存数据的复制。为了提高从虚拟地址到物理地址的转换速度,硬件通常采用TLB技术,把刚转换的地址存在cache里,下次可以直接使用。
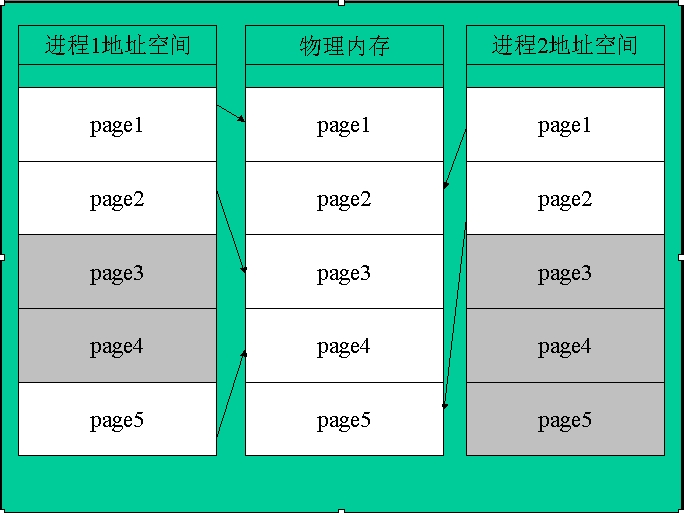
从虚拟内存到物理内存的映射并不是一个字节一个字节映射的,而是以一个称为页(page)最小单位的为基础的,页的大小视硬件平台而定,通常是4K。当应用程序访问的内存所在页面不在物理内存中时,MMU产生一个缺页中断,并挂起当前进程,缺页中断负责把相应的数据从磁盘读入内存中,再唤醒挂起的进程。
进程的虚拟内存与物理内存映射关系如下图所示(灰色页为被不在物理内存中的页):
也许我们很少直接使用共享内存,实际上除非性能上有特殊要求,我更愿意采用socket或者管道作为进程间通信的方式。但我们常常间接的使用共享内存,大家都知道共享库(或称为动态库)的优点是,多个应用程序可以公用。如果每个应用程序都加载一份共享库到内存中,显然太浪费了。所以操作系统把共享库放在共享内存中,让多个应用程序共享。另外,同一个应用程序运行多个实例时,也采用同样的方式,保证内存中只有一份可执行代码。这样的共享内存是设为只读属性的,防止应用程序无意中破坏它们。当调试器要设置断点时,相应的页面被拷贝一分,设置为可写的,再向其中写入断点指令。这些事情完全由操作系统等底层软件处理了,应用程序本身无需关心。
共享内存是怎么实现的呢?我们来看看下图(黄色页为共享内存):
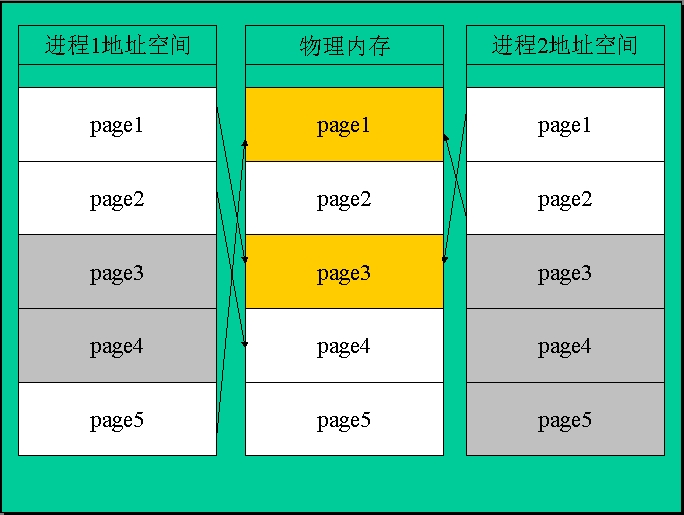
由上图可见,实现共享内存非常容易,只是把两个进程的虚拟内存映射同一块物理内存就行了。不过要注意,物理内存相同而虚拟地址却不一定相同,如图中所示进程1的page5和进程2的page2都映射到物理内存的page1上。
如何在程序中使用共享内存呢?通常很简单,操作系统或者函数库提供了一些API给我们使用。如:
Linux:
| void * mmap(void *start, size_t length, int prot , int flags, int fd, off_t offset); int munmap(void *start, size_t length); |
Win32:
HANDLE CreateFileMapping( HANDLE hFile, // handle to file LPSECURITY_ATTRIBUTES lpAttributes, // security DWORD flProtect, // protection DWORD dwMaximumSizeHigh, // high-order DWORD of size DWORD dwMaximumSizeLow, // low-order DWORD of size LPCTSTR lpName // object name ); BOOL UnmapViewOfFile( LPCVOID lpBaseAddress // starting address ); |
2. 线程局部存储(TLS)
同一个进程中的多个线程,它们的内存空间是共享的(栈除外),在一个线程修改的内存内容,对所有线程都生效。这是一个优点也是一个缺点。说它是优点,线程的数据交换变得非常快捷。说它是缺点,一个线程死掉了,其它线程也性命不保; 多个线程访问共享数据,需要昂贵的同步开销,也容易造成同步相关的BUG;。
在unix下,大家一直都对线程不是很感兴趣,直到很晚以后才引入线程这东西。像X Sever要同时处理N个客户端的连接,每秒钟要响应上百万个请求,开发人员宁愿自己实现调度机制也不用线程。让人很难想象X Server是单进程单线程模型的。再如Apache(1.3x),在unix下的实现也是采用多进程模型的,把像记分板等公共信息放入共享内存中,也不愿意采用多线程模型。
正如《unix编程艺术》中所说,线程局部存储的出现,使得这种情况出现了转机。采用线程局部存储,每个线程有一定的私有空间。这可以避免部分无意的破坏,不过仍然无法避免有意的破坏行为。
个人认为,这完全是因为unix程序不喜欢面向对象方法引起的,数据没有很好的封装起来,全局变量满天飞,在多线程情况下自然容易出问题。如果采用面向对象的方法,可以让这种情况大为改观,而无需要线程局部存储来帮忙。
当然,多一种技术就多一种选择,知道线程局部存储还是有用的。尽管只用过几次线程局部存储的方法,在那种情况下,没有线程局部存储,确实很难用其它办法实现。
线程局部存储在不同的平台有不同的实现,可移植性不太好。幸好要实现线程局部存储并不难,最简单的办法就是建立一个全局表,通过当前线程ID去查询相应的数据,因为各个线程的ID不同,查到的数据自然也不同了。
大多数平台都提供了线程局部存储的方法,无需要我们自己去实现:
linux:
| 方法一: int pthread_key_create(pthread_key_t *key, void (*destructor)(void*)); int pthread_key_delete(pthread_key_t key); void *pthread_getspecific(pthread_key_t key); int pthread_setspecific(pthread_key_t key, const void *value); 方法二: __thread int i; |
Win32
| 方法一: DWORD TlsAlloc(VOID); BOOL TlsFree( DWORD dwTlsIndex // TLS index ); BOOL TlsSetValue( DWORD dwTlsIndex, // TLS index LPVOID lpTlsValue // value to store ); LPVOID TlsGetValue( DWORD dwTlsIndex // TLS index ); 方法二: |
大内高手—常见内存错误
随着诸如代码重构和单元测试等方法引入实践,调试技能渐渐弱化了,甚至有人主张废除调试器。这是有道理的,原因在于调试的代价往往太大了,特别是调试系统集成之后的BUG,一个BUG花了几天甚至数周时间并非罕见。
而这些难以定位的BUG基本上可以归为两类:内存错误和并发问题。而又以内存错误最为普遍,即使是久经沙场的老手,也有时也难免落入陷阱。前事不忘,后世之师,了解这些常见的错误,在编程时就加以注意,把出错的概率降到最低,可以节省不少时间。
这些列举一些常见的内存错误,供新手参考。
1.内存泄露。
大家都知道,在堆上分配的内存,如果不再使用了,应该把它释放掉,以便后面其它地方可以重用。在C/C++中,内存管理器不会帮你自动回收不再使用的内存。如果你忘了释放不再使用的内存,这些内存就不能被重用,就造成了所谓的内存泄露。
把内存泄露列为首位,倒并不是因为它有多么严重的后果,而因为它是最为常见的一类错误。一两处内存泄露通常不至于让程序崩溃,也不会出现逻辑上的错误,加上进程退出时,系统会自动释放该进程所有相关的内存,所以内存泄露的后果相对来说还是比较温和的。当然了,量变会产生质变,一旦内存泄露过多以致于耗尽内存,后续内存分配将会失败,程序可能因此而崩溃。
现在的PC机内存够大了,加上进程有独立的内存空间,对于一些小程序来说,内存泄露已经不是太大的威胁。但对于大型软件,特别是长时间运行的软件,或者嵌入式系统来说,内存泄露仍然是致命的因素之一。
不管在什么情况下,采取比较谨慎的态度,杜绝内存泄露的出现,都是可取的。相反,认为内存有的是,对内存泄露放任自流都不是负责的。尽管一些工具可以帮助我们检查内存泄露问题,我认为还是应该在编程时就仔细一点,及早排除这类错误,工具只是用作验证的手段。
2.内存越界访问。
内存越界访问有两种:一种是读越界,即读了不属于自己的数据,如果所读的内存地址是无效的,程度立刻就崩溃了。如果所读内存地址是有效的,在读的时候不会出问题,但由于读到的数据是随机的,它会产生不可预料的后果。另外一种是写越界,又叫缓冲区溢出。所写入的数据对别人来说是随机的,它也会产生不可预料的后果。
内存越界访问造成的后果非常严重,是程序稳定性的致命威胁之一。更麻烦的是,它造成的后果是随机的,表现出来的症状和时机也是随机的,让BUG的现象和本质看似没有什么联系,这给BUG的定位带来极大的困难。
一些工具可以够帮助检查内存越界访问的问题,但也不能太依赖于工具。内存越界访问通常是动态出现的,即依赖于测试数据,在极端的情况下才会出现,除非精心设计测试数据,工具也无能为力。工具本身也有一些限制,甚至在一些大型项目中,工具变得完全不可用。比较保险的方法还是在编程是就小心,特别是对于外部传入的参数要仔细检查。
3.野指针。
野指针是指那些你已经释放掉的内存指针。当你调用free(p)时,你真正清楚这个动作背后的内容吗?你会说p指向的内存被释放了。没错,p本身有变化吗?答案是p本身没有变化。它指向的内存仍然是有效的,你继续读写p指向的内存,没有人能拦得住你。
释放掉的内存会被内存管理器重新分配,此时,野指针指向的内存已经被赋予新的意义。对野指针指向内存的访问,无论是有意还是无意的,都为此会付出巨大代价,因为它造成的后果,如同越界访问一样是不可预料的。
释放内存后立即把对应指针置为空值,这是避免野指针常用的方法。这个方法简单有效,只是要注意,当然指针是从函数外层传入的时,在函数内把指针置为空值,对外层的指针没有影响。比如,你在析构函数里把this指针置为空值,没有任何效果,这时应该在函数外层把指针置为空值。
4.访问空指针。
空指针在C/C++中占有特殊的地址,通常用来判断一个指针的有效性。空指针一般定义为0。现代操作系统都会保留从0开始的一块内存,至于这块内存有多大,视不同的操作系统而定。一旦程序试图访问这块内存,系统就会触发一个异常。
操作系统为什么要保留一块内存,而不是仅仅保留一个字节的内存呢?原因是:一般内存管理都是按页进行管理的,无法单纯保留一个字节,至少要保留一个页面。保留一块内存也有额外的好处,可以检查诸如p=NULL; p[1]之类的内存错误。
在一些嵌入式系统(如arm7)中,从0开始的一块内存是用来安装中断向量的,没有MMU的保护,直接访问这块内存好像不会引发异常。不过这块内存是代码段的,不是程序中有效的变量地址,所以用空指针来判断指针的有效性仍然可行。
在访问指针指向的内存时,在确保指针不是空指针。访问空指针指向的内存,通常会导致程度崩溃,或者不可预料的错误。
5.引用未初始化的变量。
未初始化变量的内容是随机的(像VC一类的编译器会把它们初始化为固定值,如0xcc),使用这些数据会造成不可预料的后果,调试这样的BUG也是非常困难的。
对于态度严谨的程度员来说,防止这类BUG非常容易。在声明变量时就对它进行初始化,是一个编程的好习惯。另外也要重视编译器的警告信息,发现有引用未初始化的变量,立即修改过来。
6.不清楚指针运算。
对于一些新手来说,指针常常让他们犯糊涂。
比如int *p = …; p+1等于(size_t)p + 1吗
老手自然清楚,新手可能就搞不清了。事实上, p+n 等于 (size_t)p + n * sizeof(*p)
指针是C/C++中最有力的武器,功能非常强大,无论是变量指针还是函数指针,都应该掌握都非常熟练。只要有不确定的地方,马上写个小程序验证一下。对每一个细节都了然于胸,在编程时会省下不少时间。
7.结构的成员顺序变化引发的错误。
在初始化一个结构时,老手可能很少像新手那样老老实实的,一个成员一个成员的为结构初始化,而是采用快捷方式,如:
Struct s
{
int l;
char* p;
};
int main(int argc, char* argv[])
{
struct s s1 = {4, "abcd"};
return 0;
}
以上这种方式是非常危险的,原因在于你对结构的内存布局作了假设。如果这个结构是第三方提供的,他很可能调整结构中成员的相对位置。而这样的调整往往不会在文档中说明,你自然很少去关注。如果调整的两个成员具有相同数据类型,编译时不会有任何警告,而程序的逻辑上可能相距十万八千里了。
正确的初始化方法应该是(当然,一个成员一个成员的初始化也行):
struct s
{
int l;
char* p;
};
int main(int argc, char* argv[])
{
struct s s1 = {.l=4, .p = "abcd"};
struct s s2 = {l:4, p:"abcd"};
return 0;
}
8.结构的大小变化引发的错误。
我们看看下面这个例子:
struct base
{
int n;
};
struct s
{
struct base b;
int m;
};
在OOP中,我们可以认为第二个结构继承了第一结构,这有什么问题吗?当然没有,这是C语言中实现继承的基本手法。
现在假设第一个结构是第三方提供的,第二个结构是你自己的。第三方提供的库是以DLL方式分发的,DLL最大好处在于可以独立替换。但随着软件的进化,问题可能就来了。
当第三方在第一个结构中增加了一个新的成员int k;,编译好后把DLL给你,你直接给了客户了。程序加载时不会有任何问题,在运行逻辑可能完全改变!原因是两个结构的内存布局重叠了。解决这类错误的唯一办法就是全部重新相关的代码。
解决这类错误的唯一办法就是重新编译全部代码。由此看来,DLL并不见得可以动态替换,如果你想了解更多相关内容,建议阅读《COM本质论》。
9.分配/释放不配对。
大家都知道malloc要和free配对使用,new要和delete/delete[]配对使用,重载了类new操作,应该同时重载类的delete/delete[]操作。这些都是书上反复强调过的,除非当时晕了头,一般不会犯这样的低级错误。
而有时候我们却被蒙在鼓里,两个代码看起来都是调用的free函数,实际上却调用了不同的实现。比如在Win32下,调试版与发布版,单线程与多线程是不同的运行时库,不同的运行时库使用的是不同的内存管理器。一不小心链接错了库,那你就麻烦了。程序可能动则崩溃,原因在于在一个内存管理器中分配的内存,在另外一个内存管理器中释放时出现了问题。
10.返回指向临时变量的指针
大家都知道,栈里面的变量都是临时的。当前函数执行完成时,相关的临时变量和参数都被清除了。不能把指向这些临时变量的指针返回给调用者,这样的指针指向的数据是随机的,会给程序造成不可预料的后果。
下面是个错误的例子:
char* get_str(void)
{
char str[] = {"abcd"};
return str;
}
int main(int argc, char* argv[])
{
char* p = get_str();
printf("%s\n", p);
return 0;
}
下面这个例子没有问题,大家知道为什么吗?
char* get_str(void)
{
char* str = {"abcd"};
return str;
}
int main(int argc, char* argv[])
{
char* p = get_str();
printf("%s\n", p);
return 0;
}
11.试图修改常量
在函数参数前加上const修饰符,只是给编译器做类型检查用的,编译器禁止修改这样的变量。但这并不是强制的,你完全可以用强制类型转换绕过去,一般也不会出什么错。
而全局常量和字符串,用强制类型转换绕过去,运行时仍然会出错。原因在于它们是是放在.rodata里面的,而.rodata内存页面是不能修改的。试图对它们修改,会引发内存错误。
下面这个程序在运行时会出错:
int main(int argc, char* argv[])
{
char* p = "abcd";
*p = '1';
return 0;
}
12.误解传值与传引用
在C/C++中,参数默认传递方式是传值的,即在参数入栈时被拷贝一份。在函数里修改这些参数,不会影响外面的调用者。如:
#include <stdlib.h>
#include <stdio.h>
void get_str(char* p)
{
p = malloc(sizeof("abcd"));
strcpy(p, "abcd");
return;
}
int main(int argc, char* argv[])
{
char* p = NULL;
get_str(p);
printf("p=%p\n", p);
return 0;
}
在main函数里,p的值仍然是空值。
13.重名符号。
无论是函数名还是变量名,如果在不同的作用范围内重名,自然没有问题。但如果两个符号的作用域有交集,如全局变量和局部变量,全局变量与全局变量之间,重名的现象一定要坚决避免。gcc有一些隐式规则来决定处理同名变量的方式,编译时可能没有任何警告和错误,但结果通常并非你所期望的。
下面例子编译时就没有警告:
t.c
#include <stdlib.h>
#include <stdio.h>
int count = 0;
int get_count(void)
{
return count;
}
main.c
#include <stdio.h>
extern int get_count(void);
int count;
int main(int argc, char* argv[])
{
count = 10;
printf("get_count=%d\n", get_count());
return 0;
}
如果把main.c中的int count;修改为int count = 0;,gcc就会编辑出错,说multiple definition of `count'。它的隐式规则比较奇妙吧,所以还是不要依赖它为好。
14. 栈溢出。
我们在前面关于堆栈的一节讲过,在PC上,普通线程的栈空间也有十几M,通常够用了,定义大一点的临时变量不会有什么问题。
而在一些嵌入式中,线程的栈空间可能只5K大小,甚至小到只有256个字节。在这样的平台中,栈溢出是最常用的错误之一。在编程时应该清楚自己平台的限制,避免栈溢出的可能。
15. 误用sizeof。
尽管C/C++通常是按值传递参数,而数组则是例外,在传递数组参数时,数组退化为指针(即按引用传递),用sizeof是无法取得数组的大小的。
从下面这个例子可以看出:
void test(char str[20])
{
printf("%s:size=%d\n", __func__, sizeof(str));
}
int main(int argc, char* argv[])
{
char str[20] = {0};
test(str);
printf("%s:size=%d\n", __func__, sizeof(str));
return 0;
}
[root@localhost mm]# ./t.exe
test:size=4
main:size=20
16. 字节对齐。
字节对齐主要目的是提高内存访问的效率。但在有的平台(如arm7)上,就不光是效率问题了,如果不对齐,得到的数据是错误的。
所幸的是,大多数情况下,编译会保证全局变量和临时变量按正确的方式对齐。内存管理器会保证动态内存按正确的方式对齐。要注意的是,在不同类型的变量之间转换时要小心,如把char*强制转换为int*时,要格外小心。
另外,字节对齐也会造成结构大小的变化,在程序内部用sizeof来取得结构的大小,这就足够了。若数据要在不同的机器间传递时,在通信协议中要规定对齐的方式,避免对齐方式不一致引发的问题。
17. 字节顺序。
字节顺序历来是设计跨平台软件时头疼的问题。字节顺序是关于数据在物理内存中的布局的问题,最常见的字节顺序有两种:大端模式与小端模式。
大端模式是高位字节数据存放在低地址处,低位字节数据存放在高地址处。
小端模式指低位字节数据存放在内存低地址处,高位字节数据存放在内存高地址处;
比如long n = 0x11223344。
模式
第1个字节
第2个字节
第3个字节
第4个字节
大端模式
0x11
0x22
0x33
0x44
小端模式
0x44
0x33
0x22
0x11
在普通软件中,字节顺序问题并不引人注目。而在开发与网络通信和数据交换有关的软件时,字节顺序问题就要特殊注意了。
18. 多线程共享变量没有用valotile修饰。
在关于全局内存的一节中,我们讲了valotile的作用,它告诉编译器,不要把变量优化到寄存器中。在开发多线程并发的软件时,如果这些线程共享一些全局变量,这些全局变量最好用valotile修饰。这样可以避免因为编译器优化而引起的错误,这样的错误非常难查。
可能还有其它一些内存相关错误,一时想不全面,这里算是抛砖引玉吧,希望各位高手补充。
大内高手—惯用手法
《POSA》中根据模式粒度把模式分为三类:架构模式、设计模式和惯用手法。其中把分层模式、管道过滤器和微内核模式等归为架构模式,把代理模式、命令模式和出版-订阅模式等归为设计模式,而把引用计数等归为惯用手法。这三类模式间的界限比较模糊,在特定的情况,有的设计模式可以作为架构模式来用,有的把架构模式也作为设计模式来用。
在通常情况下,我们可以说架构模式、设计模式和惯用手法,三者的重要性依次递减,毕竟整体决策比局部决策的影响面更大。但是任何整体都是局部组成的,局部的决策也会影响全局。惯用手法的影响虽然是局部的,其作用仍然很重要。它不但在提高软件的质量方面,而且在加快软件开发进度方面都有很大贡献。本文介绍几种关于内存的惯用手法,这些手法对于老手来说已经习以为常,对于新手来说则是必修秘技。
1. 预分配
假想我们实现了一个动态数组(vector)时,当向其中增加元素时,它会自动扩展(缩减)缓冲区的大小,无需要调用者关心。扩展缓冲区的大小的原理都是一样的:
l 先分配一块更大的缓冲区。
l 把数据从老的缓冲区拷贝到新的缓冲区。
l 释放老的缓冲区。
如果你使用realloc来实现,内存管理器可能会做些优化:如果老的缓冲区后面有连续的空闲空间,它只需要简单的扩展老的缓冲区,而跳过后面两个步骤。但在大多数情况下,它都要通过上述三个步骤来完成扩展。
以此可见,扩展缓冲区对调用者来说虽然是透明的,但决不是免费的。它得付出相当大的时间代价,以及由此产生的产生内存碎片问题。如果每次向vector中增加一个元素,都要扩展缓冲区,显然是不太合适的。
此时我们可以采用预分配机制,每次扩展时,不是需要多大就扩展多大,而是预先分配一大块内存。这一大块可以供后面较长一段时间使用,直到把这块内存全用完了,再继续用同样的方式扩展。
预分配机制比较常见,多见于一些带buffer的容器实现中,比如像vector和string等。
2. 对象引用计数
在面向对象的系统中,对象之间的协作关系非常复杂。所谓协作其实就调用对象的函数或者向对象发送消息,但不管调用函数还是发送消息,总是要通过某种方式知道目标对象才行。而最常见的做法就是保存目标对象的引用(指针),直接引用对象而不是拷贝对象,提高了时间和空间上的效率,也避免了拷贝对象的麻烦,而且有的地方就是要对象共享才行。
对象被别人引用了,但自己可能并不知道。此时麻烦就来了,如果对象被释放了,对该对象的引用就变成了野针,系统随时可能因此而崩溃。不释放也不行,因为那样会出现内存泄露。怎么办呢?
此时我们可以采用对象引用计数,对象有一个引用计数器,不管谁要引用这个对象,就要把对象的引用计数器加1,如果不再该引用了,就把对象的引用计数器减1。当对象的引用计数器被减为0时,说明没有其它对象引用它,该对象就可以安全的释放了。这样,对象的生命周期就得到了有效的管理。
对象引用计数运用相当广泛。像在COM和glib里,都是作为对象系统的基本设施之一。即使在像JAVA和C#等现代语言中,对象引用计数也是非常重要的,它是实现垃圾回收(GC)的基本手段之一。
代码示例: (atlcom.h: CcomObject)
| STDMETHOD_(ULONG, AddRef)() {return InternalAddRef();} STDMETHOD_(ULONG, Release)() { ULONG l = InternalRelease(); if (l == 0) delete this; return l; } |
3. 写时拷贝(COW)
OS内核创建子进程的过程是最常见而且最有效的COW例子:创建子进程时,子进程要继承父进程内存空间中的数据。但继承之后,两者各自有独立的内存空间,修改各自的数据不会互相影响。
要做到这一点,最简单的办法就是直接把父进程的内存空间拷贝一份。这样做可行,但问题在于拷贝内容太多,无论是时间还是空间上的开销都让人无法接受。况且,在大多数情况下,子进程只会使用少数继承过来的数据,而且多数是读取,只有少量是修改,也就说大部分拷贝的动作白做了。怎么办呢?
此时可以采用写时拷贝(COW),COW代表Copy on Write。最初的拷贝只是个假象,并不是真正的拷贝,只是把引用计数加1,并设置适当的标志。如果双方都只是读取这些数据,那好办,直接读就行了。而任何一方要修改时,为了不影响另外一方,它要把数据拷贝一份,然后修改拷贝的这一份。也就是说在修改数据时,拷贝动作才真正发生。
当然,在真正拷贝的时候,你可以选择只拷贝修改的那一部分,或者拷贝全部数据。在上面的例子中,由于内存通常是按页面来管理的,拷贝时只拷贝相关的页面,而不是拷贝整个内存空间。
写时拷贝(COW)对性能上的贡献很大,差不多任何带MMU的OS都会采用。当然它不限于内核空间,在用户空间也可以使用,比如像一些String类的实现也采用了这种方法。
代码示例(MFC:strcore.cpp):
拷贝时只是增加引用计数:
| CString::CString(const CString& stringSrc) { ASSERT(stringSrc.GetData()->nRefs != 0); if (stringSrc.GetData()->nRefs >= 0) { ASSERT(stringSrc.GetData() != _afxDataNil); m_pchData = stringSrc.m_pchData; InterlockedIncrement(&GetData()->nRefs); } else { Init(); *this = stringSrc.m_pchData; } } |
修改前才拷贝:
| void CString::MakeUpper() { CopyBeforeWrite(); _tcsupr(m_pchData); }
void CString::MakeLower() { CopyBeforeWrite(); _tcslwr(m_pchData); }
|
拷贝动作:
| void CString::CopyBeforeWrite() { if (GetData()->nRefs > 1) { CStringData* pData = GetData(); Release(); AllocBuffer(pData->nDataLength); memcpy(m_pchData, pData->data(), (pData->nDataLength+1)*sizeof(TCHAR)); } ASSERT(GetData()->nRefs <= 1); } |
4. 固定大小分配
频繁的分配大量小块内存是内存管理器的挑战之一。
首先是空间利用率上的问题:由于内存管理本身的需要一些辅助内存,假设每块内存需要8字节用作辅助内存,那么即使只要分配4个字节这样的小块内存,仍然要浪费8字节内存。一块小内存不要紧,若存在大量小块内存,所浪费的空间就可观了。
其次是内存碎片问题:频繁分配大量小块内存,很容易造成内存碎片问题。这不但降低内存管理器的效率,同时由于这些内存不连续,虽然空闲却无法使用。
此时可以采用固定大小分配,这种方式通常也叫做缓冲池(pool)分配。缓冲池(pool)先分配一块或者多块连续的大块内存,把它们分成N块大小相等的小块内存,然后进行二次分配。由于这些小块内存大小是固定的,管理大开销非常小,往往只要一个标识位用于标识该单元是否空闲,或者甚至不需要任何标识位。另外,缓冲池(pool)中所有这些小块内存分布在一块或者几块连接内存上,所以不会有内存碎片问题。
固定大小分配运用比较广泛,差不多所有的内存管理器都用这种方法来对付小块内存,比如glibc、STLPort和linux的slab等。
5. 会话缓冲池分配(Session Pool)
服务器要长时间运行,内存泄露是它的威胁之一,任何小概率的内存泄露,都可能会累积到具有破坏性的程度。从它们的运行模式来看,它们总是不断的重复某个过程,而在这个过程中,又要分配大量(次数)内存。
比如像WEB服务器,它不断的处理HTTP请求,我们把一次HTTP请求,称为一次会话。一次会话要经过很多阶段,在这个过程要做各种处理,要多次分配内存。由于处理比较复杂,分配内存的地方又比较多,内存泄露可以说防不甚防。
针对这种情况,我们可以采用会话缓冲池分配。它基于多次分配一次释放的策略,在过程开始时创建会话缓冲池(Session Pool),这个过程中所有内存分配都通过会话缓冲池(Session Pool)来分配,当这个过程完成时,销毁掉会话缓冲池(Session Pool),即释放这个过程中所分配的全部内存。
因为只需要释放一次,内存泄露的可能大大降低。会话缓冲池分配并不是太常见,apache采用的这种用法。后来自己用过两次,感觉效果不错。
当然还有其一些内存惯用手法,如cache等,这里不再多说。上述部分手法在《实时设计模式》里有详细的描述,大家可以参考一下。
笔者水平有限,若遗漏了某些重要的内存惯用手法,还望各位高手补充。
Cited from:http://blog.chinaunix.net/u/30686/showart.php?id=247782















 112
112

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









