硬件环境
开发板:nanopi2 (cpu:A9 s5p4418 )
软件环境
内核版本: linux3.4.39
交叉编译器:arm-Linux-gcc version 4.9.3 (ctng-1.21.0-229g-FA) 64位系统版本
Linux3.4内核GPIO驱动说明
Kernel 2.6.32版本以上提供了gpio口管理的库文件/kernel/drivers/gpio/gpiolib.c。
相关的接口:
1.int gpio_request(unsigned gpio, const char *label)
申请一个pin脚作为gpio口,命名为 * label,如果经过判断空闲的 申请成功了做一些初始的bit位设置。
2.void gpio_free(unsigned gpio)
释放这个gpio口
3.int gpio_direction_input(unsigned gpio)
设置gpio口为输入模式
4.int gpio_direction_output(unsigned gpio, int value)
设置gpio口为输出模式 value为初始值 0为高电平/1为低电平
5.void __gpio_set_value(unsigned gpio, int value)
设置gpio口的值
6.int __gpio_get_value(unsigned gpio)
获取gpio口的值
底层芯片具体实现
在drivers/gpio下实现了通用的基于gpiolib的GPIO驱动,其中定义了一个通用的用于描述底层GPIO控制器的gpio_chip结构体,并要求具体的SoC实现gpio_chip结构体的成员函数,最后透过gpiochip_add()注册gpio_chip。
驱动程序源码
#include <linux/module.h>
#include <linux/gpio.h>
#include <linux/delay.h>
#include <linux/kernel.h>
#include <linux/moduleparam.h>
#include <linux/init.h>
#include <linux/hrtimer.h>
#include <linux/ktime.h>
#include <linux/device.h>
#include <linux/kdev_t.h>
#include <linux/interrupt.h>
#include <linux/sched.h>
#include <linux/miscdevice.h>
#include <mach/platform.h>
#include <mach/devices.h>
#define DEVICE_NAME "4418_relay"
unsigned int J1_GPIO = PAD_GPIO_C + 11;
unsigned int J2_GPIO = PAD_GPIO_C + 12;
#define J1_OFF 0x00
#define J1_ON 0x01
#define J2_OFF 0x10
#define J2_ON 0x11
char drv_buf[2];
static int update_relay(void)
{
switch(drv_buf[0]) {
case J1_ON:
gpio_set_value(J1_GPIO, 0);
return 0;
case J1_OFF:
gpio_set_value(J1_GPIO, 1);
return 0;
case J2_ON:
gpio_set_value(J2_GPIO, 0);
return 0;
case J2_OFF:
gpio_set_value(J2_GPIO, 1);
return 0;
default:
return -EINVAL;
}
}
static int relay_write(struct file *file, const char * buffer, size_t count, loff_t * ppos)
{
unsigned long err;
err = copy_from_user(drv_buf, buffer, 1);
update_relay();
return 1;
}
static struct file_operations dev_fops={
write:relay_write,
};
static struct miscdevice misc = {
.minor = MISC_DYNAMIC_MINOR,
.name = DEVICE_NAME,
.fops = &dev_fops,
};
static int __init my_relay_init(void)
{
int ret;
gpio_direction_output(J1_GPIO, 1);
gpio_direction_output(J2_GPIO, 1);
ret = misc_register(&misc);
printk (DEVICE_NAME"\t#NanoPi2 J1 J2 initialized\n");
return ret;
}
static void __exit my_relay_exit(void)
{
misc_deregister(&misc);
}
module_init(my_relay_init);
module_exit(my_relay_exit);
MODULE_LICENSE("GPL");
MODULE_AUTHOR("TONY");
MODULE_DESCRIPTION("91arm.com Relay Driver");
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
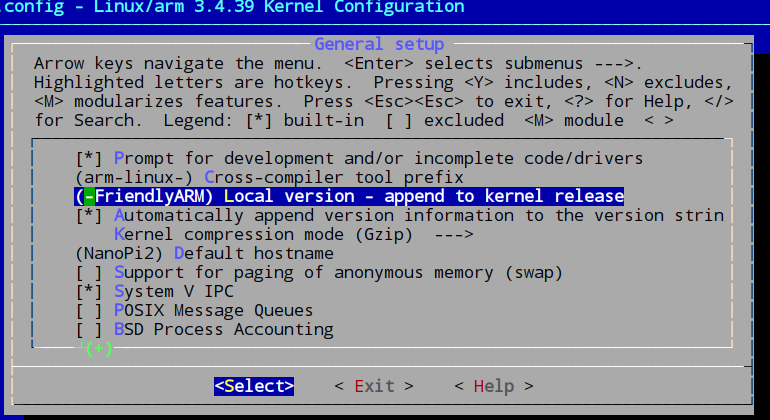
修改内核配置菜单,增加当前驱动配置。
内核配置参考文档
内核模块编译
make CROSS_COMPILE=arm-linux- modules
内核模块不能加载问题
insmod 加载出现如下问题
root@nanopi2:/home/fa
insmod: ERROR: could not insert module 4418_relay.ko: Invalid module format
查看错误信息,version magic驱动程序同开发板内核不匹配。
root@nanopi2:/home/fa
[ 2589.164000] 4418_relay: version magic '3.4.39-s5p4418 SMP preempt mod_unload ARMv7 p2v8 ' should be '3.4.39-FriendlyARM SMP preempt mod_unload ARMv7 p2v8 '
修改内核版本信息,-s5p4418改成内核的FriendlyARM。
测试程序源码
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <errno.h>
#define DEV_FILE "/dev/4418_relay"
#define J1_OFF 0x00
#define J1_ON 0x01
#define J2_OFF 0x10
#define J2_ON 0x11
int main()
{
int fd_dev=-1;
char dat[2];
int cmd;
printf("nanoPi driver Test\n");
fd_dev = open(DEV_FILE,O_RDWR);
if(fd_dev<0){
printf("open device err\n");
return 0;
}
while(1){
printf("1:J1 OFF 2:J1 ON 3:J2 OFF 4:J2 ON\n");
printf("Please input:");
scanf("%d",&cmd);
switch(cmd){
case 1:
dat[0] = J1_OFF;
break;
case 2:
dat[0] = J1_ON;
break;
case 3:
dat[0] = J2_OFF;
break;
case 4:
dat[0] = J2_ON;
break;
default:
break;
}
write(fd_dev,dat,1);
}
return 0;
}





















 2911
2911











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









