







改造前
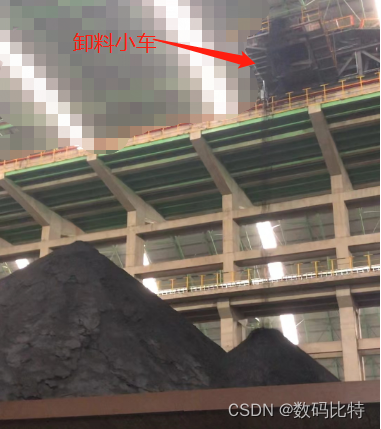
钢铁企业环保升级改造,新建了一座封闭堆料场做试点。整个料场东西两侧各9个料仓,两侧各3台刮板机加一条传送带,料场中间高架上两台卸料小车各负责向一侧卸料。工作沟通效率低,现场作业靠电话、对讲机沟通;安全生产和工人健康,刮板机需要人员现场操作;降本增效,增加机器整体工作效率,减少操作工和调度人员数量。

改造前料场工作流程
1、卸料。
铁矿粉从码头通过几公里的传送带输送到料场,料场中间高架两侧有卸料小车向指定的料仓卸料。卸料过程由总控室人工控制,需要联系码头约定卸料时间,远程移动卸料小车到指定料仓位置,通知料场作业人员指定料仓禁止刮板机活动。
卸料
2、平料。
铁矿粉通过卸料小车落到料仓内,形成一个个锥形料堆。为快速响应烧结车间的送料需求,在卸料之后和送料之前会进行平料作业。平料作业就是通过刮板机将料堆斜面尽量刮平,斜面底部接近仓底外边界。
3、送料。
刮板机移动到指定料仓内,从料仓一侧向另一侧移动,刮板下降到料堆侧面贴合后开始刮料。刮下来矿粉通过底部传送带输送到烧结车间。
改造设想
1、卸料任
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









