







1.概念
1.1一些定义
- 图(Graph)是由顶点的有穷非空集合和顶点之间边的集合组成,通常表示为G(V,E),G表示一个图,V是图中顶点的集合,E是图G中边的集合。注:线性表中的数据叫元素;树中叫结点;图中称为顶点(Vertex)。线性表中可以没有元素,树中可以没有结点,但图中不能没有顶点,可以没有边。
- 无向边:顶点Vi和Vj之间的边没有方向,成这条边为无向边,用(Vi,Vj)表示。
- 无向图:图中任意两个顶点的边都是无向边。
- 有向边:若从顶点Vi到Vj的边有方向,则称这条边为有向边,也成为弧(Arc),用<Vi,Vj>表示,其中Vi为弧尾,Vj为弧头。
- 有向图:图中任意两个顶点的边都是有向边。
- 简单图:不存在指向自身的边和重合的边的图。
无向完全图:无向图中,任意两个顶点之间都存在边。
有向完全图:有向图中,任意两个顶点之间都存在方向相反的两条弧。
稀疏图;有很少条边或弧的图称为稀疏图,反之称为稠密图。
权(Weight):表示从图中一个顶点到另一个顶点的距离或耗费。
网:带有权重的图。
度:与特定顶点相连接的边数。
出度、入度:有向图中的概念,出度表示以此顶点为起点的边的数目,入度表示以此顶点为终点的边的数目。
环:第一个顶点和最后一个顶点相同的路径。
简单环:除去第一个顶点和最后一个顶点后没有重复顶点的环。
连通图:任意两个顶点都相互连通的图。
1.2图的分类
根据边是否有方向,图分为有向图和无向图。
无向图是指图中所有的边都不区分方向,如下图所示
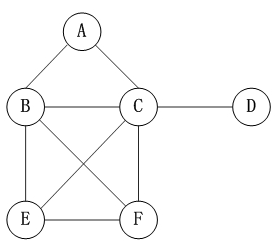
图中顶点V1={A,B,C,D,E,F}
边E1={(A,B),(A,C),(B,C),(B,E),(B,F),(C,F),(C,D),(E,F),(C,E)}
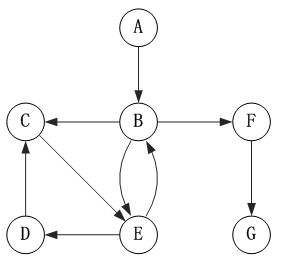
有向图是指边带有方向,从弧尾指向弧头,如下图所示
2.图的存储结构
由于图的不同顶点的度数不同,若按照最大度数设计结点结构会造成存储浪费;如果按照顶点自己的度数设计不同结构,又会导致操作不便。
2.1邻接矩阵
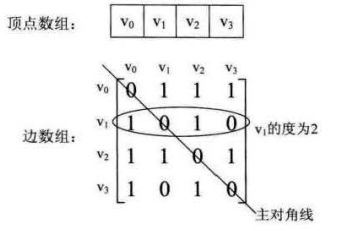
邻接矩阵使用两个数组存储图的信息,其中一个一维数组存储顶点,另一个二维数组存储边的信息
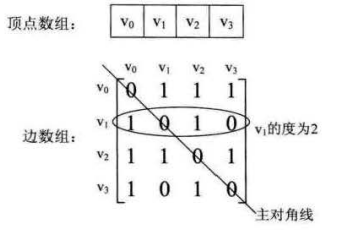
如上图所示,数组中对角线元素为0,因此不存在顶点到自身的边。某行元素之和代表该顶点的出度,列元素之和代表入度。
如果是带有权值的网,二维数组中不在用0和1表示,而是把元素值表示为权值,不存在的边表示为无穷,对角线上的元素依然是0。
邻接矩阵定义的图比较方便,直接根据顶点个数定义相应大小的二维数组,再根据边的关系填充数据即可。对于无向图,邻接矩阵是个对称矩阵,因此实际上会有一定的空间浪费。
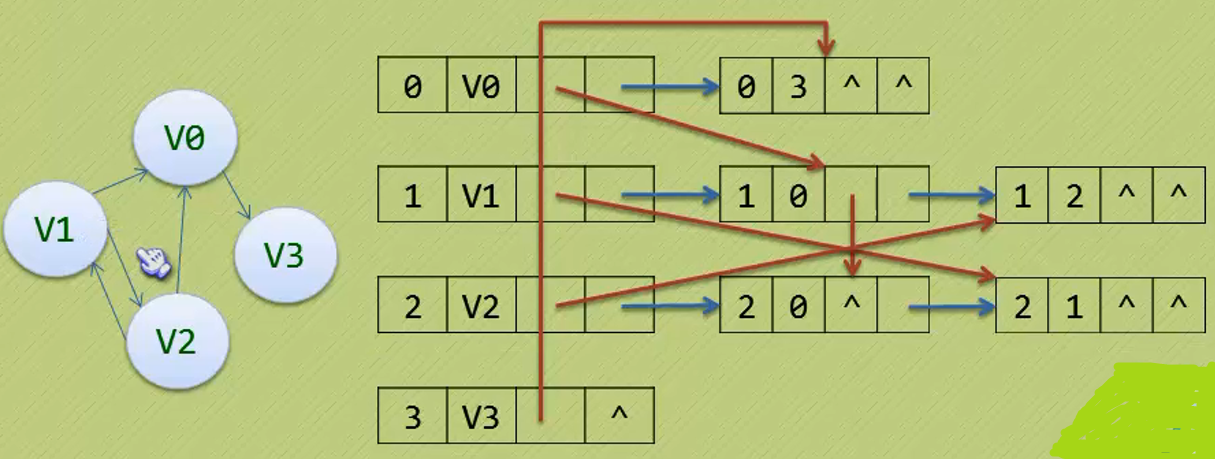
2.2邻接表
由于邻接矩阵造成了空间浪费,因此引入邻接表的概念,即用链表存储边的信息
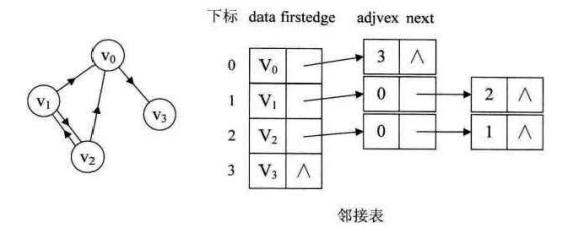
如上图,数组用于存储顶点信息,其附带一个指针域指向第一个边,边的数据域存放了顶点在数组中的下表位置,指针域指向下一个边结点。连接表显示了顶点的出度信息,但需要遍历整个图才能知道出度信息。
2.3十字链表
十字链表将邻接表和逆邻接表相结合,解决了邻接表的缺陷
如上图,顶点结构中包含数据域、指向出边表的指针以及指向出边表的指针。边结构中第一个元素为边的起点在数组中的下标,第二个元素为边的终点在顶点数组中的下标,第三个元素指向入边表指针域,第四个元素指向出边表的下一边。
3.图的遍历
从图中国某一个顶点出发遍历其余顶点,每个顶点仅被访问一次。
3.1深度优先遍历
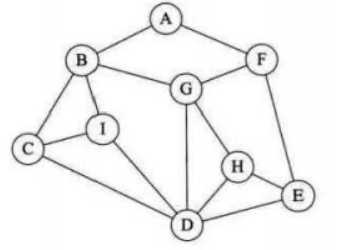
相当于一条路走到黑,发现多个出度时,首先选择右手边的边前进,当发现出度之后的顶点被访问过时,则回退一步继续搜查,发现没有访问过的顶点时继续前进,否则继续后退,直到所有顶点都被访问为止,以下图为例子
(1)从A出发,发现出度为B,F。选择右手边的B。A->B
(2)从B出发,出度为C,I,G,选择右手边的C
(3)从C出发,出度为I,D,选择右手边的D
(4)从D出发,出度为I,G,H,E,选择右手边的E
(5)从E出发,出度为H,F,选择右手边的F
(6)从F出发,出度为A,G,选择右手边的A,但发现A已经被遍历过,所以选择G
(7)从G出发,出度为B,D,H,B,D访问过了,选择H
(8)从H出发,出度为D,F,均被访问过了。但此时图中的节点并没有遍历完全,因此我们要按原路返回,去找没走过的路
(9)回退到G,发现所连接的BDFH均被访问;
(10)回退到F,没有通道;回退到E,没有通道,回退到D,发现一个点I,进行标记(若此时与D相邻的还有其他顶点,则在此时一起进行标记);然后继续回退到A,走完整个路
int visited[MAXVEX] = {0};
void DFS(MGraphy g,int i){
visited[i] = 1;
printf("%c,\t",g.vexs[i]);
for (int j = 0; j < g.vnum; j++) {
if(g.arc[i][j]!=0 && g.arc[i][j]!=IUNFINITY && !visited[j]){
DFS(g,j);
}
}
}
void DFSTraverse(MGraphy g){
printf("deep first search begin.\n");
for (int i = 0; i < g.vnum; i++) {
if(!visited[i]){
DFS(g,i);
}
}
}
int main() {
MGraphy g ;
createGraphy(&g);
printf("graphy create success ! ! !\n");
DFSTraverse(g);
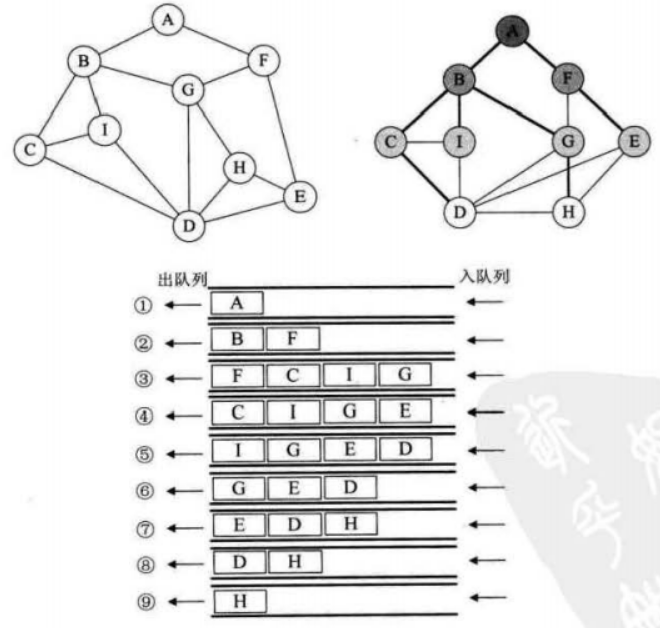
}3.2广度优先遍历
需要使用队列进行辅助,思路是每发现一个顶点后将其入队,将其设置为已经访问的标志后出队,找到和其相连的所有顶点并入队,再出队第一个位置的元素,如此往复。
void BFSTraverse(MGraphy g){
SeqQueue *queue;
initQueue(queue); // 顺序表实现的队列,先初始化
int visited[] = {0}; // 初始化每个结点对应为未访问
int a;
for(int i=0;i<g.vnum;i++){ // 对每个结点进行深度遍历
if(visited[i] == 0){
visited[i] = 1;
printf("%c",g.vexs[i]); // 深度遍历后对结点进行打印操作
enQueue(queue,i); // 将节点放到队列中
while (queueLength(queue)){
deQueue(queue,&a); // 取出对头元素,进行广度遍历
for (int j = 0; j < g.vnum; ++j) {
if(g.arc[a][j] == 1 && visited[j]==0){ // 存在边,且对应的店没有方问过
visited[j] = 1;
printf("%c",g.vexs[j]);
enQueue(queue,j); // 遍历后再入队
}
}
}
}
}
}

















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









