







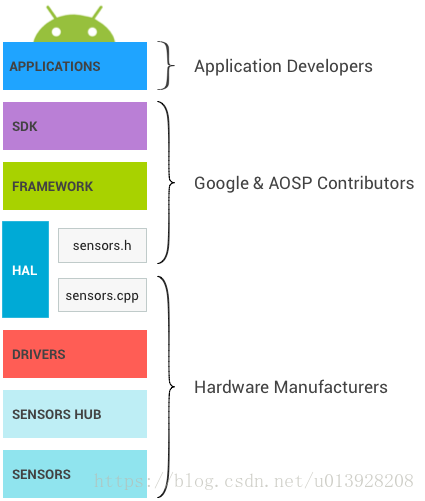
Android传感器属于虚拟设备,可提供来自以下各种物理传感器的数据:加速度计、陀螺仪、磁力计、气压计、湿度传感器、压力传感器、光传感器、近程传感器和心率传感器。下图显示的是 Android 传感器堆栈。尽管某些传感器可以绕过传感器中枢(如果存在)进行通信,但各个组件仅可与其上方和下方紧邻的组件通信。控制系统从应用向下流向传感器,数据从传感器向上流向应用。
框架负责将多个应用关联到 HAL。HAL 本身是单一客户端。如果框架级别没有发生这种多路复用,则在任何指定时间内只有一个应用可以访问各个传感器。当第一个应用注册到传感器时,框架会向 HAL 发送请求以激活传感器。当其他应用注册到相同的传感器时,框架会考虑每个应用的要求,并将更新的已请求参数发送到 HAL。
采样率将是请求的采样率的最大值,这意味着一些应用接收事件的频率会高于所请求的频率。
最大报告延迟将是请求的延迟的最小值。如果某个应用以 0 为最大报告延迟请求传感器,则所有应用将以连续模式从该传感器接收事件,即使某些应用以非零值的最大报告延迟请求传感器也是如此。有关详情,请参阅批处理。当注册到某个传感器的最后一个应用取消注册之后,框架会向 HAL 发送请求以停用该传感器,从而避免不必要的功耗。
Android 框架为部分复合传感器提供默认实现。如果设备上有陀螺仪、加速度计和磁力计,但没有旋转矢量、重力和线性加速度传感器,则该框架会实现这些传感器,以便应用仍可以使用它们。
1. SensorManager
frameworks/base/core/java/android/hardware/SystemSensorManager.java
SystemSensorManager继承自SensorManager
public SystemSensorManager(Context context, Looper mainLooper) {
synchronized(sLock) {
if (!sNativeClassInited) {
sNativeClassInited = true;
nativeClassInit(); //初始化
}
}
mMainLooper = mainLooper;
mTargetSdkLevel = context.getApplicationInfo().targetSdkVersion;
mContext = context;
mNativeInstance = nativeCreate(context.getOpPackageName()); //创建传感器实例
// 初始化传感器列表
for (int index = 0;;++index) {
Sensor sensor = new Sensor();
if (!nativeGetSensorAtIndex(mNativeInstance, sensor, index)) break;
mFullSensorsList.add(sensor);
mHandleToSensor.put(sensor.getHandle(), sensor);
}
}
frameworks/base/core/jni/android_hardware_SensorManager.cpp
将Java层的Sensor映射到JNI层的SensorOffsets
static void
nativeClassInit (JNIEnv *_env, jclass _this)
{
//android.hardware.Sensor
SensorOffsets& sensorOffsets = gSensorOffsets;
jclass sensorClass = (jclass)
MakeGlobalRefOrDie(_env, FindClassOrDie(_env, "android/hardware/Sensor"));
sensorOffsets.clazz = sensorClass;
sensorOffsets.name = GetFieldIDOrDie(_env, sensorClass, "mName", "Ljava/lang/String;");
sensorOffsets.vendor = GetFieldIDOrDie(_env, sensorClass, "mVendor", "Ljava/lang/String;");
sensorOffsets.version = GetFieldIDOrDie(_env, sensorClass, "mVersion", "I");
sensorOffsets.handle = GetFieldIDOrDie(_env, sensorClass, "mHandle", "I");
sensorOffsets.range = GetFieldIDOrDie(_env, sensorClass, "mMaxRange", "F");
sensorOffsets.resolution = GetFieldIDOrDie(_env, sensorClass, "mResolution","F");
sensorOffsets.power = GetFieldIDOrDie(_env, sensorClass, "mPower", "F");
sensorOffsets.minDelay = GetFieldIDOrDie(_env, sensorClass, "mMinDelay", "I");
sensorOffsets.fifoReservedEventCount =
GetFieldIDOrDie(_env,sensorClass, "mFifoReservedEventCount", "I");
sensorOffsets.fifoMaxEventCount = GetFieldIDOrDie(_env,sensorClass, "mFifoMaxEventCount", "I");
sensorOffsets.stringType =
GetFieldIDOrDie(_env,sensorClass, "mStringType", "Ljava/lang/String;");
sensorOffsets.requiredPermission =
GetFieldIDOrDie(_env,sensorClass, "mRequiredPermission", "Ljava/lang/String;");
sensorOffsets.maxDelay = GetFieldIDOrDie(_env,sensorClass, "mMaxDelay", "I");
sensorOffsets.flags = GetFieldIDOrDie(_env,sensorClass, "mFlags", "I");
sensorOffsets.setType = GetMethodIDOrDie(_env,sensorClass, "setType", "(I)Z");
sensorOffsets.setUuid = GetMethodIDOrDie(_env,sensorClass, "setUuid", "(JJ)V");
sensorOffsets.init = GetMethodIDOrDie(_env,sensorClass, "<init>", "()V");
// java.util.List;
ListOffsets& listOffsets = gListOffsets;
jclass listClass = (jclass) MakeGlobalRefOrDie(_env, FindClassOrDie(_env, "java/util/List"));
listOffsets.clazz = listClass;
listOffsets.add = GetMethodIDOrDie(_env,listClass, "add", "(Ljava/lang/Object;)Z");
// initialize java.lang.String and empty string intern
StringOffsets& stringOffsets = gStringOffsets;
stringOffsets.clazz = MakeGlobalRefOrDie(_env, FindClassOrDie(_env, "java/lang/String"));
stringOffsets.intern =
GetMethodIDOrDie(_env, stringOffsets.clazz, "intern", "()Ljava/lang/String;");
ScopedLocalRef<jstring> empty(_env, _env->NewStringUTF(""));
stringOffsets.emptyString = (jstring)
MakeGlobalRefOrDie(_env, _env->CallObjectMethod(empty.get(), stringOffsets.intern));
}
static jlong
nativeCreate
(JNIEnv *env, jclass clazz, jstring opPackageName)
{
ScopedUtfChars opPackageNameUtf(env, opPackageName);
return (jlong) &SensorManager::getInstanceForPackage(String16(opPackageNameUtf.c_str()));
}
frameworks/native/libs/sensor/SensorManager.cpp
SensorManager校验创建
ensorManager& SensorManager::getInstanceForPackage(const String16& packageName) {
waitForSensorService(nullptr);
Mutex::Autolock _l(sLock);
SensorManager* sensorManager;
auto iterator = sPackageInstances.find(packageName);
if (iterator != sPackageInstances.end()) {
sensorManager = iterator->second;
} else {
String16 opPackageName = packageName;
//作权限校验
if (opPackageName.size() <= 0) {
sp<IBinder> binder = defaultServiceManager()->getService(String16("permission"));
if (binder != 0) {
const uid_t uid = IPCThreadState::self()->getCallingUid();
Vector<String16> packages;
interface_cast<IPermissionController>(binder)->getPackagesForUid(uid, packages);
if (!packages.isEmpty()) {
opPackageName = packages[0];
} else {
ALOGE("No packages for calling UID");
}
} else {
ALOGE("Cannot get permission service");
}
}
sensorManager = new SensorManager(opPackageName); //创建实例
......
return *sensorManager;
}
SensorManager::SensorManager(const String16& opPackageName)
: mSensorList(0), mOpPackageName(opPackageName), mDirectConnectionHandle(1) {
// okay we're not locked here, but it's not needed during construction
assertStateLocked();
}
frameworks/native/libs/sensor/SensorManager.cpp
mSensorServer类型为ISensorServer,SensorService的远程代理
status_t SensorManager::assertStateLocked() {
bool initSensorManager = false;
if (mSensorServer == NULL) {
initSensorManager = true;
} else {
// Ping binder to check if sensorservice is alive.
status_t err = IInterface::asBinder(mSensorServer)->pingBinder();
if (err != NO_ERROR) {
initSensorManager = true;
}
}
if (initSensorManager) {
waitForSensorService(&mSensorServer); //等待传感服务上线
LOG_ALWAYS_FATAL_IF(mSensorServer == nullptr, "getService(SensorService) NULL");
class DeathObserver : public IBinder::DeathRecipient {
SensorManager& mSensorManager;
virtual void binderDied(const wp<IBinder>& who) {
ALOGW("sensorservice died [%p]", who.unsafe_get());
mSensorManager.sensorManagerDied();
}
public:
explicit DeathObserver(SensorManager& mgr) : mSensorManager(mgr) { }
};
mDeathObserver = new DeathObserver(*const_cast<SensorManager *>(this));
IInterface::asBinder(mSensorServer)->linkToDeath(mDeathObserver);
mSensors = mSensorServer->getSensorList(mOpPackageName); //从SensorService获取传感器列表
size_t count = mSensors.size();
mSensorList =
static_cast<Sensor const**>(malloc(count * sizeof(Sensor*)));
LOG_ALWAYS_FATAL_IF(mSensorList == NULL, "mSensorList NULL");
for (size_t i=0 ; i<count ; i++) {
mSensorList[i] = mSensors.array() + i;
}
}
return NO_ERROR;
}
frameworks/base/core/jni/android_hardware_SensorManager.cpp
static jboolean
nativeGetSensorAtIndex(JNIEnv *env, jclass clazz, jlong sensorManager, jobject sensor, jint index)
{
SensorManager* mgr = reinterpret_cast<SensorManager*>(sensorManager);
Sensor const* const* sensorList;
ssize_t count = mgr->getSensorList(&sensorList); //返回上面的传感器列表
if (ssize_t(index) >= count) {
return false;
}
return translateNativeSensorToJavaSensor(env, sensor, *sensorList[index]) != NULL;
}
frameworks/base/core/jni/android_hardware_SensorManager.cpp
将C层的Sensor转换成Java层的Sensor,同时绑定处理句柄handle
static jobject
translateNativeSensorToJavaSensor(JNIEnv *env, jobject sensor, const Sensor& nativeSensor) {
const SensorOffsets& sensorOffsets(gSensorOffsets);
if (sensor == NULL) {
// Sensor sensor = new Sensor();
sensor = env->NewObject(sensorOffsets.clazz, sensorOffsets.init, "");
}
if (sensor != NULL) {
jstring name = getJavaInternedString(env, nativeSensor.getName());
jstring vendor = getJavaInternedString(env, nativeSensor.getVendor());
jstring requiredPermission =
getJavaInternedString(env, nativeSensor.getRequiredPermission());
env->SetObjectField(sensor, sensorOffsets.name, name);
env->SetObjectField(sensor, sensorOffsets.vendor, vendor);
env->SetIntField(sensor, sensorOffsets.version, nativeSensor.getVersion());
env->SetIntField(sensor, sensorOffsets.handle, nativeSensor.getHandle()); //处理句柄
env->SetFloatField(sensor, sensorOffsets.range, nativeSensor.getMaxValue());
env->SetFloatField(sensor, sensorOffsets.resolution, nativeSensor.getResolution());
env->SetFloatField(sensor, sensorOffsets.power, nativeSensor.getPowerUsage());
env->SetIntField(sensor, sensorOffsets.minDelay, nativeSensor.getMinDelay());
env->SetIntField(sensor, sensorOffsets.fifoReservedEventCount,
nativeSensor.getFifoReservedEventCount());
env->SetIntField(sensor, sensorOffsets.fifoMaxEventCount,
nativeSensor.getFifoMaxEventCount());
env->SetObjectField(sensor, sensorOffsets.requiredPermission,
requiredPermission);
env->SetIntField(sensor, sensorOffsets.maxDelay, nativeSensor.getMaxDelay());
env->SetIntField(sensor, sensorOffsets.flags, nativeSensor.getFlags());
if (env->CallBooleanMethod(sensor, sensorOffsets.setType, nativeSensor.getType())
== JNI_FALSE) {
jstring stringType = getJavaInternedString(env, nativeSensor.getStringType());
env->SetObjectField(sensor, sensorOffsets.stringType, stringType);
}
// TODO(b/29547335): Rename "setUuid" method to "setId".
int64_t id = nativeSensor.getId();
env->CallVoidMethod(sensor, sensorOffsets.setUuid, id, 0);
}
return sensor;
}
2. SensorService
frameworks/native/services/sensorservice/SensorService.cpp
初始化硬件传感器和虚拟传感器
void SensorService::onFirstRef() {
ALOGD("nuSensorService starting...");
SensorDevice& dev(SensorDevice::getInstance());
sHmacGlobalKeyIsValid = initializeHmacKey();
if (dev.initCheck() == NO_ERROR) {
sensor_t const* list;
ssize_t count = dev.getSensorList(&list); //从SensorDevice获取硬件传感器列表
if (count > 0) {
ssize_t orientationIndex = -1;
bool hasGyro = false, hasAccel = false, hasMag = false;
uint32_t virtualSensorsNeeds =
(1<<SENSOR_TYPE_GRAVITY) |
(1<<SENSOR_TYPE_LINEAR_ACCELERATION) |
(1<<SENSOR_TYPE_ROTATION_VECTOR) |
(1<<SENSOR_TYPE_GEOMAGNETIC_ROTATION_VECTOR) |
(1<<SENSOR_TYPE_GAME_ROTATION_VECTOR);
for (ssize_t i=0 ; i<count ; i++) {
bool useThisSensor=true;
switch (list[i].type) {
case SENSOR_TYPE_ACCELEROMETER:
hasAccel = true; //存在硬件加速度传感器
break;
case SENSOR_TYPE_MAGNETIC_FIELD:
hasMag = true;
break;
case SENSOR_TYPE_ORIENTATION:
orientationIndex = i;
break;
case SENSOR_TYPE_GYROSCOPE:
case SENSOR_TYPE_GYROSCOPE_UNCALIBRATED:
hasGyro = true;
break;
case SENSOR_TYPE_GRAVITY:
case SENSOR_TYPE_LINEAR_ACCELERATION:
case SENSOR_TYPE_ROTATION_VECTOR:
case SENSOR_TYPE_GEOMAGNETIC_ROTATION_VECTOR:
case SENSOR_TYPE_GAME_ROTATION_VECTOR:
if (IGNORE_HARDWARE_FUSION) {
useThisSensor = false;
} else {
virtualSensorsNeeds &= ~(1<<list[i].type);
}
break;
}
if (useThisSensor) {
registerSensor( new HardwareSensor(list[i]) ); //注册硬件传感器
}
}
// it's safe to instantiate the SensorFusion object here
// (it wants to be instantiated after h/w sensors have been
// registered)
SensorFusion::getInstance();
if (hasGyro && hasAccel && hasMag) {
// Add Android virtual sensors if they're not already
// available in the HAL
bool needRotationVector =
(virtualSensorsNeeds & (1<<SENSOR_TYPE_ROTATION_VECTOR)) != 0;
registerSensor(new RotationVectorSensor(), !needRotationVector, true);
registerSensor(new OrientationSensor(), !needRotationVector, true);
bool needLinearAcceleration =
(virtualSensorsNeeds & (1<<SENSOR_TYPE_LINEAR_ACCELERATION)) != 0;
registerSensor(new LinearAccelerationSensor(list, count),
!needLinearAcceleration, true);
// virtual debugging sensors are not for user
registerSensor( new CorrectedGyroSensor(list, count), true, true);
registerSensor( new GyroDriftSensor(), true, true);
}
if (hasAccel && hasGyro) {
bool needGravitySensor = (virtualSensorsNeeds & (1<<SENSOR_TYPE_GRAVITY)) != 0;
registerSensor(new GravitySensor(list, count), !needGravitySensor, true);
bool needGameRotationVector =
(virtualSensorsNeeds & (1<<SENSOR_TYPE_GAME_ROTATION_VECTOR)) != 0;
registerSensor(new GameRotationVectorSensor(), !needGameRotationVector, true);
}
if (hasAccel && hasMag) {
bool needGeoMagRotationVector =
(virtualSensorsNeeds & (1<<SENSOR_TYPE_GEOMAGNETIC_ROTATION_VECTOR)) != 0;
registerSensor(new GeoMagRotationVectorSensor(), !needGeoMagRotationVector, true);
}
mInitCheck = NO_ERROR;
mAckReceiver = new SensorEventAckReceiver(this); //传感器事件应答接收器
mAckReceiver->run("SensorEventAckReceiver", PRIORITY_URGENT_DISPLAY);//启动应答线程
run("SensorService", PRIORITY_URGENT_DISPLAY);
// priority can only be changed after run
enableSchedFifoMode();
}
}
}
frameworks/native/services/sensorservice/SensorService.cpp
传感器应答线程,处理和转发虚拟传感器,硬件传感器事件
bool SensorService::threadLoop() {
const size_t vcount = mSensors.getVirtualSensors().size(); //虚拟传感器数量
const size_t minBufferSize = SensorEventQueue::MAX_RECEIVE_BUFFER_EVENT_COUNT;//传感器队列缓冲大小
const size_t numEventMax = minBufferSize / (1 + vcount); //最大事件数量
SensorDevice& device(SensorDevice::getInstance()); //传感器设备
const int halVersion = device.getHalDeviceVersion(); //硬件抽象层版本
do {
ssize_t count = device.poll(mSensorEventBuffer, numEventMax); //从SensorDevice中poll事件
// Reset sensors_event_t.flags to zero for all events in the buffer.
for (int i = 0; i < count; i++) {
mSensorEventBuffer[i].flags = 0;
}
SortedVector< sp<SensorEventConnection> > activeConnections; //传感器事件连接集合
populateActiveConnections(&activeConnections); //过滤活跃的连接
// handle virtual sensors
if (count && vcount) {
sensors_event_t const * const event = mSensorEventBuffer;
if (!mActiveVirtualSensors.empty()) {
size_t k = 0;
SensorFusion& fusion(SensorFusion::getInstance());
if (fusion.isEnabled()) {
for (size_t i=0 ; i<size_t(count) ; i++) {
fusion.process(event[i]);
}
}
for (size_t i=0 ; i<size_t(count) && k<minBufferSize ; i++) {
for (int handle : mActiveVirtualSensors) {
if (count + k >= minBufferSize) {
ALOGE("buffer too small to hold all events: "
"count=%zd, k=%zu, size=%zu",
count, k, minBufferSize);
break;
}
sensors_event_t out;
sp<SensorInterface> si = mSensors.getInterface(handle);
if (si == nullptr) {
ALOGE("handle %d is not an valid virtual sensor", handle);
continue;
}
if (si->process(&out, event[i])) { //处理虚拟传感器事件
mSensorEventBuffer[count + k] = out;
k++;
}
}
}
}
}
for (int i = 0; i < count; ++i) {
// sensor based on content of event.
if (mSensorEventBuffer[i].type == SENSOR_TYPE_DYNAMIC_SENSOR_META) {
if (mSensorEventBuffer[i].dynamic_sensor_meta.connected) {
if (mSensors.isNewHandle(handle)) {
const auto& uuid = mSensorEventBuffer[i].dynamic_sensor_meta.uuid;
sensor_t s = dynamicSensor;
// make sure the dynamic sensor flag is set
s.flags |= DYNAMIC_SENSOR_MASK;
// force the handle to be consistent
s.handle = handle;
SensorInterface *si = new HardwareSensor(s, uuid); //硬件传感器
}
}
}
}
size_t numConnections = activeConnections.size();
for (size_t i=0 ; i < numConnections; ++i) {
if (activeConnections[i] != 0) {
//发送传感器事件
activeConnections[i]->sendEvents(mSensorEventBuffer, count, mSensorEventScratch,
mMapFlushEventsToConnections);
needsWakeLock |= activeConnections[i]->needsWakeLock();
......
}
}
} while (!Thread::exitPending());
abort();
return false;
}
frameworks/native/services/sensorservice/SensorDevice.h
最终传感器服务调用传感器设备处理传感器的激活,启用,批处理等一系列操作
class SensorDevice : public Singleton<SensorDevice>, public Dumpable {
public:
private:
time_t mTs; // timestamp of the error
int mCount; // number of transport errors observed
};
ssize_t getSensorList(sensor_t const** list);
void handleDynamicSensorConnection(int handle, bool connected);
status_t initCheck() const;
int getHalDeviceVersion() const;
ssize_t poll(sensors_event_t* buffer, size_t count);//取数据
status_t activate(void* ident, int handle, int enabled); //激活
status_t batch(void* ident, int handle, int flags, int64_t samplingPeriodNs,
int64_t maxBatchReportLatencyNs); //批处理
// Call batch with timeout zero instead of calling setDelay() for newer devices.
status_t setDelay(void* ident, int handle, int64_t ns);
status_t flush(void* ident, int handle);
status_t setMode(uint32_t mode);
bool isDirectReportSupported() const;
int32_t registerDirectChannel(const sensors_direct_mem_t *memory);
void unregisterDirectChannel(int32_t channelHandle);
int32_t configureDirectChannel(int32_t sensorHandle,
int32_t channelHandle, const struct sensors_direct_cfg_t *config);
void disableAllSensors();
void enableAllSensors();
void autoDisable(void *ident, int handle);
status_t injectSensorData(const sensors_event_t *event);
void notifyConnectionDestroyed(void *ident);
}
3. Sensor事件
frameworks/base/core/java/android/hardware/SensorManager.java
public boolean registerListener(SensorListener listener, int sensors, int rate) {
return getLegacySensorManager().registerListener(listener, sensors, rate);
}
private LegacySensorManager getLegacySensorManager() {
synchronized (mSensorListByType) {
if (mLegacySensorManager == null) {
Log.i(TAG, "This application is using deprecated SensorManager API which will "
+ "be removed someday. Please consider switching to the new API.");
mLegacySensorManager = new LegacySensorManager(this); //返回一个代理
}
return mLegacySensorManager;
}
}
frameworks/base/core/java/android/hardware/LegacySensorManager.java
public boolean registerListener(SensorListener listener, int sensors, int rate) {
if (listener == null) {
return false;
}
boolean result = false;
result = registerLegacyListener(SensorManager.SENSOR_ACCELEROMETER,
Sensor.TYPE_ACCELEROMETER, listener, sensors, rate) || result;
result = registerLegacyListener(SensorManager.SENSOR_MAGNETIC_FIELD,
Sensor.TYPE_MAGNETIC_FIELD, listener, sensors, rate) || result;
result = registerLegacyListener(SensorManager.SENSOR_ORIENTATION_RAW,
Sensor.TYPE_ORIENTATION, listener, sensors, rate) || result;
result = registerLegacyListener(SensorManager.SENSOR_ORIENTATION,
Sensor.TYPE_ORIENTATION, listener, sensors, rate) || result;
result = registerLegacyListener(SensorManager.SENSOR_TEMPERATURE,
Sensor.TYPE_TEMPERATURE, listener, sensors, rate) || result;
return result;
}
private boolean registerLegacyListener(int legacyType, int type,
SensorListener listener, int sensors, int rate) {
boolean result = false;
// Are we activating this legacy sensor?
if ((sensors & legacyType) != 0) {
// if so, find a suitable Sensor
Sensor sensor = mSensorManager.getDefaultSensor(type); //获得一个传感器
if (sensor != null) {
synchronized (mLegacyListenersMap) {
//取出代理监听
LegacyListener legacyListener = mLegacyListenersMap.get(listener);
if (legacyListener == null) {
legacyListener = new LegacyListener(listener);
mLegacyListenersMap.put(listener, legacyListener); // 监听映射
}
// register this legacy sensor with this legacy listener
if (legacyListener.registerSensor(legacyType)) {
// and finally, register the legacy listener with the new apis
result = mSensorManager.registerListener(legacyListener, sensor, rate);
} else {
result = true; // sensor already enabled
}
}
}
}
return result;
}
frameworks/base/core/java/android/hardware/SensorManager.java
public boolean registerListener(SensorEventListener listener, Sensor sensor,
int samplingPeriodUs, int maxReportLatencyUs) {
int delay = getDelay(samplingPeriodUs);
return registerListenerImpl(listener, sensor, delay, null, maxReportLatencyUs, 0);
}
frameworks/base/core/java/android/hardware/SystemSensorManager.java
/** @hide */
@Override
protected boolean registerListenerImpl(SensorEventListener listener, Sensor sensor,
int delayUs, Handler handler, int maxBatchReportLatencyUs, int reservedFlags) {
synchronized (mSensorListeners) {
SensorEventQueue queue = mSensorListeners.get(listener);
if (queue == null) {
Looper looper = (handler != null) ? handler.getLooper() : mMainLooper;
final String fullClassName = listener.getClass().getEnclosingClass() != null ?
listener.getClass().getEnclosingClass().getName() :
listener.getClass().getName();
//创建传感器事件队列
queue = new SensorEventQueue(listener, looper, this, fullClassName);
if (!queue.addSensor(sensor, delayUs, maxBatchReportLatencyUs)) { //加入队列
queue.dispose();
return false;
}
mSensorListeners.put(listener, queue); //一个监听对应一个队列
return true;
} else {
return queue.addSensor(sensor, delayUs, maxBatchReportLatencyUs);
}
}
}
frameworks/base/core/java/android/hardware/SystemSensorManager.java
static final class SensorEventQueue extends BaseEventQueue {
private final SensorEventListener mListener;
private final SparseArray<SensorEvent> mSensorsEvents = new SparseArray<SensorEvent>();
public SensorEventQueue(SensorEventListener listener, Looper looper,
SystemSensorManager manager, String packageName) {
super(looper, manager, OPERATING_MODE_NORMAL, packageName);
mListener = listener;
}
@Override
public void addSensorEvent(Sensor sensor) {
SensorEvent t = new SensorEvent(Sensor.getMaxLengthValuesArray(sensor,
mManager.mTargetSdkLevel));
synchronized (mSensorsEvents) {
mSensorsEvents.put(sensor.getHandle(), t); //事件和处理句柄映射
}
}
@Override
public void removeSensorEvent(Sensor sensor) {
synchronized (mSensorsEvents) {
mSensorsEvents.delete(sensor.getHandle());
}
}
// Called from native code.
//由Native层调用
@SuppressWarnings("unused")
@Override
protected void dispatchSensorEvent(int handle, float[] values, int inAccuracy,
long timestamp) {
final Sensor sensor = mManager.mHandleToSensor.get(handle);
if (sensor == null) {
// sensor disconnected
return;
}
SensorEvent t = null;
synchronized (mSensorsEvents) {
t = mSensorsEvents.get(handle); //取出事件
}
if (t == null) {
// This may happen if the client has unregistered and there are pending events in
// the queue waiting to be delivered. Ignore.
return;
}
// Copy from the values array.
System.arraycopy(values, 0, t.values, 0, t.values.length);
t.timestamp = timestamp;
t.accuracy = inAccuracy;
t.sensor = sensor;
// call onAccuracyChanged() only if the value changes
final int accuracy = mSensorAccuracies.get(handle);
if ((t.accuracy >= 0) && (accuracy != t.accuracy)) {
mSensorAccuracies.put(handle, t.accuracy);
mListener.onAccuracyChanged(t.sensor, t.accuracy); //回调给调用者
}
mListener.onSensorChanged(t);
}
......
}
frameworks/base/core/java/android/hardware/SystemSensorManager.java
BaseEventQueue将对Native层的队列进行初始化
private static abstract class BaseEventQueue {
private static native long nativeInitBaseEventQueue(long nativeManager,
WeakReference<BaseEventQueue> eventQWeak, MessageQueue msgQ,
String packageName, int mode, String opPackageName);
private static native int nativeEnableSensor(long eventQ, int handle, int rateUs,
int maxBatchReportLatencyUs);
private static native int nativeDisableSensor(long eventQ, int handle);
private static native void nativeDestroySensorEventQueue(long eventQ);
private static native int nativeFlushSensor(long eventQ);
private static native int nativeInjectSensorData(long eventQ, int handle,
float[] values,int accuracy, long timestamp);
private long nSensorEventQueue;
private final SparseBooleanArray mActiveSensors = new SparseBooleanArray();
protected final SparseIntArray mSensorAccuracies = new SparseIntArray();
private final CloseGuard mCloseGuard = CloseGuard.get();
protected final SystemSensorManager mManager;
protected static final int OPERATING_MODE_NORMAL = 0;
protected static final int OPERATING_MODE_DATA_INJECTION = 1;
BaseEventQueue(Looper looper, SystemSensorManager manager, int mode, String packageName) {
if (packageName == null) packageName = "";
//初始化Native队列
nSensorEventQueue = nativeInitBaseEventQueue(manager.mNativeInstance,
new WeakReference<>(this), looper.getQueue(),
packageName, mode, manager.mContext.getOpPackageName());
mCloseGuard.open("dispose");
mManager = manager;
}
......
}
frameworks/base/core/jni/android_hardware_SensorManager.cpp
初始化传感器事件队列
static jlong nativeInitSensorEventQueue(JNIEnv *env, jclass clazz, jlong sensorManager,
jobject eventQWeak, jobject msgQ, jstring packageName, jint mode) {
SensorManager* mgr = reinterpret_cast<SensorManager*>(sensorManager);
ScopedUtfChars packageUtf(env, packageName);
String8 clientName(packageUtf.c_str());
sp<SensorEventQueue> queue(mgr->createEventQueue(clientName, mode));
sp<MessageQueue> messageQueue = android_os_MessageQueue_getMessageQueue(env, msgQ);
if (messageQueue == NULL) {
jniThrowRuntimeException(env, "MessageQueue is not initialized.");
return 0;
}
sp<Receiver> receiver = new Receiver(queue, messageQueue, eventQWeak); //处理来自SensorService的传感器事件
receiver->incStrong((void*)nativeInitSensorEventQueue);
return jlong(receiver.get());
}
frameworks/native/libs/sensor/SensorManager.cpp
sp<SensorEventQueue> SensorManager::createEventQueue(String8 packageName, int mode) {
sp<SensorEventQueue> queue;
Mutex::Autolock _l(mLock);
while (assertStateLocked() == NO_ERROR) {
sp<ISensorEventConnection> connection =
mSensorServer->createSensorEventConnection(packageName, mode, mOpPackageName);
if (connection == NULL) {
// SensorService just died or the app doesn't have required permissions.
ALOGE("createEventQueue: connection is NULL.");
return NULL;
}
f = new SensorEventQueue(connection); //创建SensorEventQueue
break;
}
return queue;
}
frameworks/native/services/sensorservice/SensorService.cpp
p<ISensorEventConnection> SensorService::createSensorEventConnection(const String8& packageName,
int requestedMode, const String16& opPackageName) {
//新建事件连接
sp<SensorEventConnection> result(new SensorEventConnection(this, uid, connPackageName,
requestedMode == DATA_INJECTION, connOpPackageName));
if (requestedMode == DATA_INJECTION) {
if (mActiveConnections.indexOf(result) < 0) {
//加入活跃连接队列
mActiveConnections.add(result);
}
result->updateLooperRegistration(mLooper); //更新Looper
}
return result;
}
frameworks/native/services/sensorservice/SensorEventConnection.cpp
SensorService::SensorEventConnection::SensorEventConnection(
const sp<SensorService>& service, uid_t uid, String8 packageName, bool isDataInjectionMode,
const String16& opPackageName)
: mService(service), mUid(uid), mWakeLockRefCount(0), mHasLooperCallbacks(false),
mDead(false), mDataInjectionMode(isDataInjectionMode), mEventCache(NULL),
mCacheSize(0), mMaxCacheSize(0), mPackageName(packageName), mOpPackageName(opPackageName),
mDestroyed(false) {
mChannel = new BitTube(mService->mSocketBufferSize); //通过BitTube传递事件
#if DEBUG_CONNECTIONS
mEventsReceived = mEventsSentFromCache = mEventsSent = 0;
mTotalAcksNeeded = mTotalAcksReceived = 0;
#endif
}
frameworks/native/libs/sensor/SensorEventQueue.cpp
SensorEventQueue::SensorEventQueue(const sp<ISensorEventConnection>& connection)
: mSensorEventConnection(connection), mRecBuffer(NULL), mAvailable(0), mConsumed(0),
mNumAcksToSend(0) {
mRecBuffer = new ASensorEvent[MAX_RECEIVE_BUFFER_EVENT_COUNT];
}
void SensorEventQueue::onFirstRef()
{
mSensorChannel = mSensorEventConnection->getSensorChannel();
}
frameworks/base/core/jni/android_hardware_SensorManager.cpp
Receiver继承自消息循环的LooperCallback, //Fd是BitTube的Fd,与消息循环共用一个Fd,回调传感器事件
class Receiver : public LooperCallback {
sp<SensorEventQueue> mSensorQueue;
sp<MessageQueue> mMessageQueue;
jobject mReceiverWeakGlobal;
jfloatArray mFloatScratch;
jintArray mIntScratch;
public:
......
private:
virtual void onFirstRef() {
LooperCallback::onFirstRef();
mMessageQueue->getLooper()->addFd(mSensorQueue->getFd(), 0,
ALOOPER_EVENT_INPUT, this, mSensorQueue.get());
}
virtual int handleEvent(int fd, int events, void* data) {
JNIEnv* env = AndroidRuntime::getJNIEnv();
sp<SensorEventQueue> q = reinterpret_cast<SensorEventQueue *>(data);
ScopedLocalRef<jobject> receiverObj(env, jniGetReferent(env, mReceiverWeakGlobal));
ssize_t n;
ASensorEvent buffer[16];
while ((n = q->read(buffer, 16)) > 0) {
for (int i=0 ; i<n ; i++) {
if (buffer[i].type == SENSOR_TYPE_STEP_COUNTER) {
// step-counter returns a uint64, but the java API only deals with floats
float value = float(buffer[i].u64.step_counter);
env->SetFloatArrayRegion(mFloatScratch, 0, 1, &value);
} else if (buffer[i].type == SENSOR_TYPE_DYNAMIC_SENSOR_META) {
float value[2];
value[0] = buffer[i].dynamic_sensor_meta.connected ? 1.f: 0.f;
value[1] = float(buffer[i].dynamic_sensor_meta.handle);
env->SetFloatArrayRegion(mFloatScratch, 0, 2, value);
} else if (buffer[i].type == SENSOR_TYPE_ADDITIONAL_INFO) {
env->SetIntArrayRegion(mIntScratch, 0, 14,
buffer[i].additional_info.data_int32);
env->SetFloatArrayRegion(mFloatScratch, 0, 14,
buffer[i].additional_info.data_float);
} else {
env->SetFloatArrayRegion(mFloatScratch, 0, 16, buffer[i].data);
}
if (buffer[i].type == SENSOR_TYPE_META_DATA) {
// This is a flush complete sensor event. Call dispatchFlushCompleteEvent
// method.
if (receiverObj.get()) {
env->CallVoidMethod(receiverObj.get(),
gBaseEventQueueClassInfo.dispatchFlushCompleteEvent,
buffer[i].meta_data.sensor);
}
} else if (buffer[i].type == SENSOR_TYPE_ADDITIONAL_INFO) {
// This is a flush complete sensor event. Call dispatchAdditionalInfoEvent
// method.
if (receiverObj.get()) {
int type = buffer[i].additional_info.type;
int serial = buffer[i].additional_info.serial;
env->CallVoidMethod(receiverObj.get(),
gBaseEventQueueClassInfo.dispatchAdditionalInfoEvent,
buffer[i].sensor,
type, serial,
mFloatScratch,
mIntScratch,
buffer[i].timestamp);
}
}else {
int8_t status;
switch (buffer[i].type) {
case SENSOR_TYPE_ORIENTATION:
case SENSOR_TYPE_MAGNETIC_FIELD:
case SENSOR_TYPE_ACCELEROMETER:
case SENSOR_TYPE_GYROSCOPE:
case SENSOR_TYPE_GRAVITY:
case SENSOR_TYPE_LINEAR_ACCELERATION:
status = buffer[i].vector.status;
break;
case SENSOR_TYPE_HEART_RATE:
status = buffer[i].heart_rate.status;
break;
default:
status = SENSOR_STATUS_ACCURACY_HIGH;
break;
}
if (receiverObj.get()) {
//调用Java层的dispatchSensorEvent,回调传感器事件
env->CallVoidMethod(receiverObj.get(),
gBaseEventQueueClassInfo.dispatchSensorEvent,
buffer[i].sensor,
mFloatScratch,
status,
buffer[i].timestamp);
}
}
if (env->ExceptionCheck()) {
mSensorQueue->sendAck(buffer, n);
ALOGE("Exception dispatching input event.");
return 1;
}
}
mSensorQueue->sendAck(buffer, n);
}
if (n<0 && n != -EAGAIN) {
// FIXME: error receiving events, what to do in this case?
}
return 1;
}
};
至此传感器系统架构基本分析完成,我们并没有涉及到具体的传感器驱动实现,只深入到HAL层,具体的手机由于传感器类型数量不同,各家厂商有各自不同的设计优化,比如使用特殊的传感器芯片,借助传感器中枢进行省电优化等。除此之外,传感器系统还涉及到动态传感器,传感器直通,传感器注入控制等。传感器如此重要且传感器让移动设备更加智能,更具未来感,比如屏下指纹,屏下摄像头等。














 304
304











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









