







拓扑排序主要是为解决一个工程能否顺序进行的问题,但有时我们还需要解决工程完成需要的最短时间问题。如果我们要对一个流程图获得最短时间,就必须要分析它们的拓扑关系,并且找到当中最关键的流程,这个流程的时间就是最短时间。
在前面讲了AOV网的基础上,来介绍一个新的概念。在一个表示工程的带权有向图中,用顶点表示事件,用有向边表示活动,用边上的权值表示活动的持续时间,这种有向图的边表示活动的网,称之为AOE网(Activity On edge Network)。由于一个工程,总有一个开始,一个结束,在正常情况下,AOE网只有一个源点一个汇点。
既然AOE网是表示工程流程的,所以就具有明显的工程属性。只有在某顶点代表的事件发生后,从该顶点出发的各活动才能开始。只有在进入某顶点的各活动都已经结束,该顶点代表的事件才能发生。
尽管AOV网和AOE网都是用来对工程建模的,但它们还是有很大的区别,主要体现在AOV网是顶点表示活动的网,它只描述活动之间的制约关系,而AOE网是用边表示活动的网,边上的权值表示活动持续的时间,如图7-9-3所示两图的对比。因此,AOE网是要建立在活动之间制约关系没有矛盾的基础之上,再来分析完成整个工程需要多少时间,或者为缩短完成工程所需时间,应当加快哪些活动等问题。
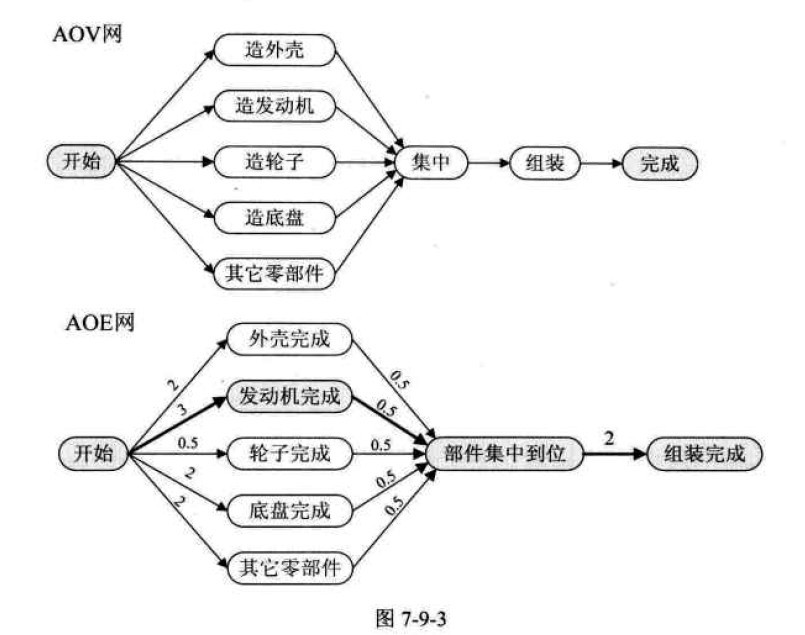
我们把路径上各个活动所持续的时间之后称为路径长度,从源点到汇点具有最大长度的路径叫关键路径,在关键路径上完成的活动叫关键活动。显然就图7-9-3的AOE网而言,开始->发动机完成->部件集中到位->组装完成就是关键路径,路径长度为5.5。
如果我们需要缩短整个工期,去改进轮子的生产效率,哪怕改动成0.1也无益于整个工期的变化,只有缩短关键路径上的关键活动时间才才可以减少整个工期长度。例如如果发动机制造缩短为2.5,整车组装缩短为1.5,那么关键路径就为4.5,整整缩短了一天的时间。
如果某项活动的最早开始时间和最晚开始时间一样,表示中间没有空隙,则此项活动就为关键活动。为此,我们需要定义以下几个参数。
1、事件的最早发生时间 etv(earliest time of vertex):即顶点vk 的最早发生时间。
2、事件的最晚发生时间 ltv(latest time of vertex):即顶点vk 的最短发生时间。也就是每个顶点对应的事件最晚需要开始的时间,超出此时间将会延误整个工期。
3、活动的最早开工时间 ete (earliest time of edge):即弧ak 的最早发生时间。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









