






NeRF-Det: Learning Geometry-Aware Volumetric Representation for Multi-View 3D Object Detection
NeRF-Det: 为多视角三维物体检测学习几何感知容积表示法
介绍
本文介绍了一种新颖的方法,用于仅使用RGB图像作为输入进行室内3D目标检测。作者提出了利用神经辐射场(NeRF)来显式估计3D几何形状,以提高检测性能。他们引入了几何先验来增强NeRF的泛化能力,并通过共享的多层感知器(MLP)连接检测和NeRF分支,使NeRF能够高效地适应检测任务。该方法在基准数据集上超过了现有的最先进方法,并且能够在不进行场景特定优化的情况下很好地泛化到未见过的场景。文档提供了相关工作的概述,并详细描述了所提出的NeRF-Det方法。
架构图
架构说明
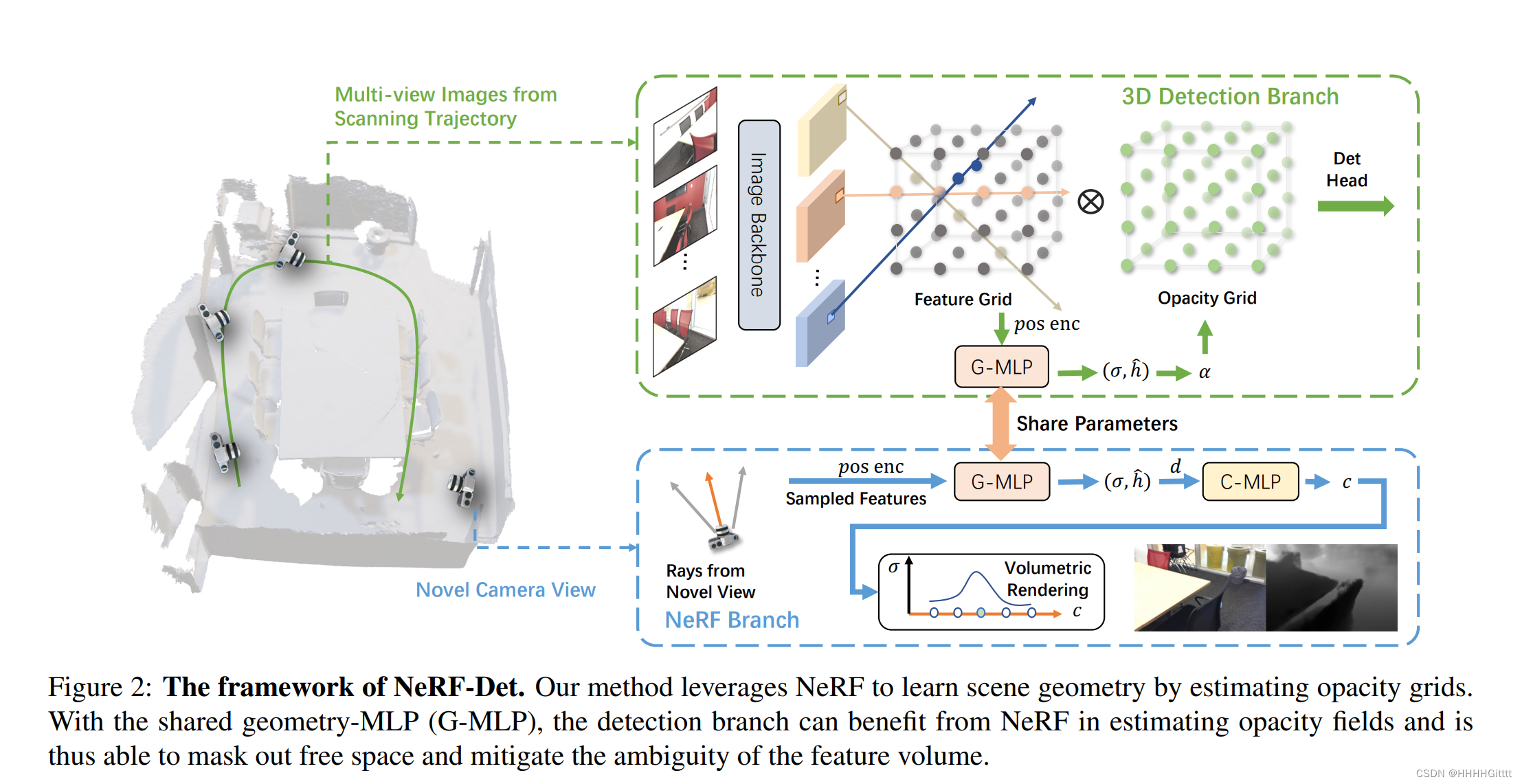
NeRF-Det的框架。我们的方法利用 NeRF 通过估计不透明度网格来学习场景几何形状。通过共享几何 MLP (G-MLP),检测分支可以从 NeRF 中获益,从而能够屏蔽可用空间并减轻特征体积的模糊性。
解读
-
利用NeRF学习场景几何:NeRF-Det方法通过NeRF(Neural Radiance Fields)来学习场景的3D几何结构。NeRF是一种利用深度学习来从多视角2D图像重建连续3D场景表示的技术,它能够为场景中的每个点估计颜色和体积密度(或不透明度)。在NeRF-Det中,特别强调了利用NeRF估计“不透明度网格”(opacity grids),这些网格代表了场景中不同位置的不透明度,从而揭示了场景的几何结构。
-
共享几何MLP(G-MLP):NeRF-Det引入了一个共享的几何多层感知器(Geometry-MLP,简称G-MLP),这是一个深度神经网络模块,用于连接NeRF的几何学习部分和目标检测分支。通过这种设计,目标检测分支能够直接利用从NeRF学到的场景几何信息。
-
从NeRF中受益:由于目标检测分支和NeRF通过G-MLP紧密连接,检测分支能够从NeRF估计的不透明度场中受益。这意味着检测算法可以更准确地区分场景中的空间区域是属于实体物体(不透明)还是空闲空间(透明或半透明)。
-
解决特征体积的歧义:通过利用NeRF提供的不透明度信息,NeRF-Det能够“屏蔽掉”(mask out)空闲空间,并减少特征体积(feature volume)中的歧义。在3D目标检测中,特征体积歧义是一个常见问题,因为来自背景或不相关区域的特征可能会干扰目标的准确检测。通过排除这些空闲空间,NeRF-Det能够更专注于实际物体的特征,从而提高检测性能。
实验Experimental Result
主要介绍了以下内容:
-
实验设置和评估方法:论文详细介绍了实验的设置,包括使用的数据集、评估指标以及比较的基线方法。实验主要在ScanNet数据集上进行,评估指标包括新视角合成的峰值信噪比(PSNR)和深度估计的均方根误差(RMSE)。
-
新视角合成和深度估计结果:尽管新视角合成和深度估计不是本文的主要焦点,但作者报告了在这两个任务上的平均结果。对于新视角合成,实现了20+的PSNR,而对于深度估计,实现了0.756的RMSE。这些结果虽然不是最先进的,但与现有方法相比,证明了作者方法在渲染合理深度方面的有效性。
-
消融研究:作者进行了多项消融研究,以探讨不同组件对NeRF-Det性能的影响,包括不同的特征采样策略、是否共享G-MLP、不同的损失函数以及不同的特征输入方式。
-
3D检测性能:文中展示了NeRF-Det在3D检测任务上的性能,包括在不同视图下的平均精度(mAP@.25和mAP@.50)。结果表明,提出的方法能够有效地利用多视图观测进行3D检测,并且在处理场景几何时表现出色。
-
定性结果和讨论:提供了更多的新视角合成和深度估计的可视化结果,展示了方法在测试集上的泛化能力。特别是在一些较难的案例上,如充满彩色书籍的书架和极其密集排列的椅子场景,方法能够给出合理的新视角合成结果和准确的几何预测。
-
对室外3D检测的讨论:虽然这部分内容在提供的引用中没有详细描述,但文中强调了NeRF-Det与其他方法在室外3D检测方面的不同之处,指出了其在模拟场景几何方面的优势。
通过在ScanNet和ARKITScene数据集上的广泛实验,论文证明了其方法的有效性,实现了使用RGB输入进行室内3D检测的最先进性能。特别是,NeRF分支也展示了对未见场景的良好泛化能力。
论文指出,尽管NeRF-Det在多视图观测的3D检测中表现出色,但在处理室外3D检测时仍存在挑战,特别是在如何有效地利用NeRF学习来引导3D检测方面。作者计划在未来的工作中解决这些问题,并将NeRF-Det应用于室外3D检测。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









