






该算法 转速环采用广义预测控制和扩展状态观测器作为前馈叠加输出为给定转矩 给定转矩经过牛顿迭代法数值求解得到dq电流 仿真表明具有良好的调速性能 和抗干扰能力
ID:7678651585887577
Keepmoving




该算法转速环采用广义预测控制和扩展状态观测器作为前馈叠加输出,以实现给定转矩的控制。通过牛顿迭代法进行数值求解,得到dq电流。仿真结果表明,该算法具有良好的调速性能和抗干扰能力。
在现代工业中,控制系统的性能和稳定性对于提高生产效率和保障生产质量至关重要。特别是在电机控制领域,提高控制系统的转速跟踪精度和抗干扰能力是一个具有挑战性的任务。为了解决这个问题,本文提出了一种基于广义预测控制和扩展状态观测器的转速控制算法。
广义预测控制(GPC)是一种针对非线性系统建模和控制的方法,通过建立系统的数学模型和对未来状态的预测来实现控制目标。在该算法中,首先建立了电机转速环的数学模型,包括电机动态特性、负载特性等。然后,利用广义预测控制算法对转速进行预测,并生成相应的控制信号。
扩展状态观测器(ESO)是一种用于估计系统状态的观测器,通过测量系统输出和输入信息,估计系统的状态变量,从而实现对系统的控制。在该算法中,利用扩展状态观测器对电机转速进行状态估计,并将估计值作为前馈输入,叠加在控制信号中,以进一步提高控制性能。
为了实现给定转矩的控制,本文提出了一种牛顿迭代法对电流进行数值求解的方法。通过迭代更新,可以得到使转矩误差最小化的dq电流。
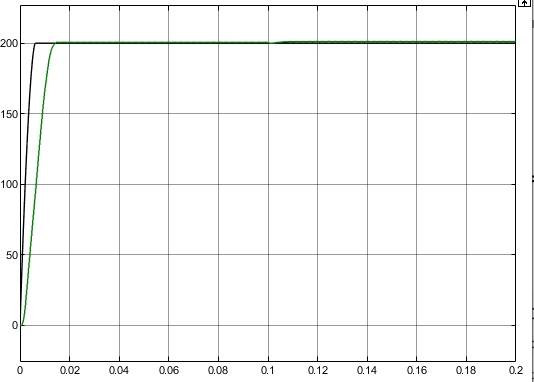
为了验证该算法的性能,我们进行了仿真实验。实验结果表明,该算法在转速跟踪精度和抗干扰能力方面均表现出色。在转速变化过程中,系统能够快速响应,并且能够有效抑制外部干扰对系统性能的影响。
综上所述,该算法通过采用广义预测控制和扩展状态观测器,以及牛顿迭代法对电流进行数值求解,实现了给定转矩的控制。仿真实验结果表明,该算法具有良好的调速性能和抗干扰能力,适用于电机控制领域。
尽管本文提出的算法在仿真实验中表现出色,但仍然存在一些局限性。例如,在真实环境中,电机控制系统可能受到更多的干扰和噪声,需要进一步优化算法以提高鲁棒性。
未来的研究方向可以包括但不限于,进一步优化算法的性能和稳定性,考虑更多的控制因素和约束条件,并进行实际系统的验证。通过不断改进和创新,我们有望在电机控制领域取得更好的控制效果和应用效益。
综上所述,本文提出了一种基于广义预测控制和扩展状态观测器的转速控制算法,并通过牛顿迭代法对电流进行数值求解。仿真实验结果表明,该算法在转速跟踪精度和抗干扰能力方面表现出色,具有较好的应用前景。未来的研究可以进一步优化算法的性能和稳定性,并且在实际系统中进行验证。希望本文的研究能够为电机控制领域的研究和应用提供一定的参考和借鉴。
相关的代码,程序地址如下:http://coupd.cn/651585887577.html

















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









