






PID反步滑膜控制四旋翼无人机轨迹跟踪控制算法仿真分析
一、背景与目标
在本次技术博客文章中,我们将针对四旋翼无人机轨迹跟踪控制算法展开详细的分析与仿真。基于后文所提到的某个具体的关键词段落,我们的目标围绕PID反步控制、滑膜控制这两种算法展开讨论,通过构建三维仿真模型来验证其在无人机轨迹跟踪中的应用效果。同时,我们还将提供相关的建模过程、仿真结果及对应的文献资料(PPT格式)。
二、仿真过程与方法
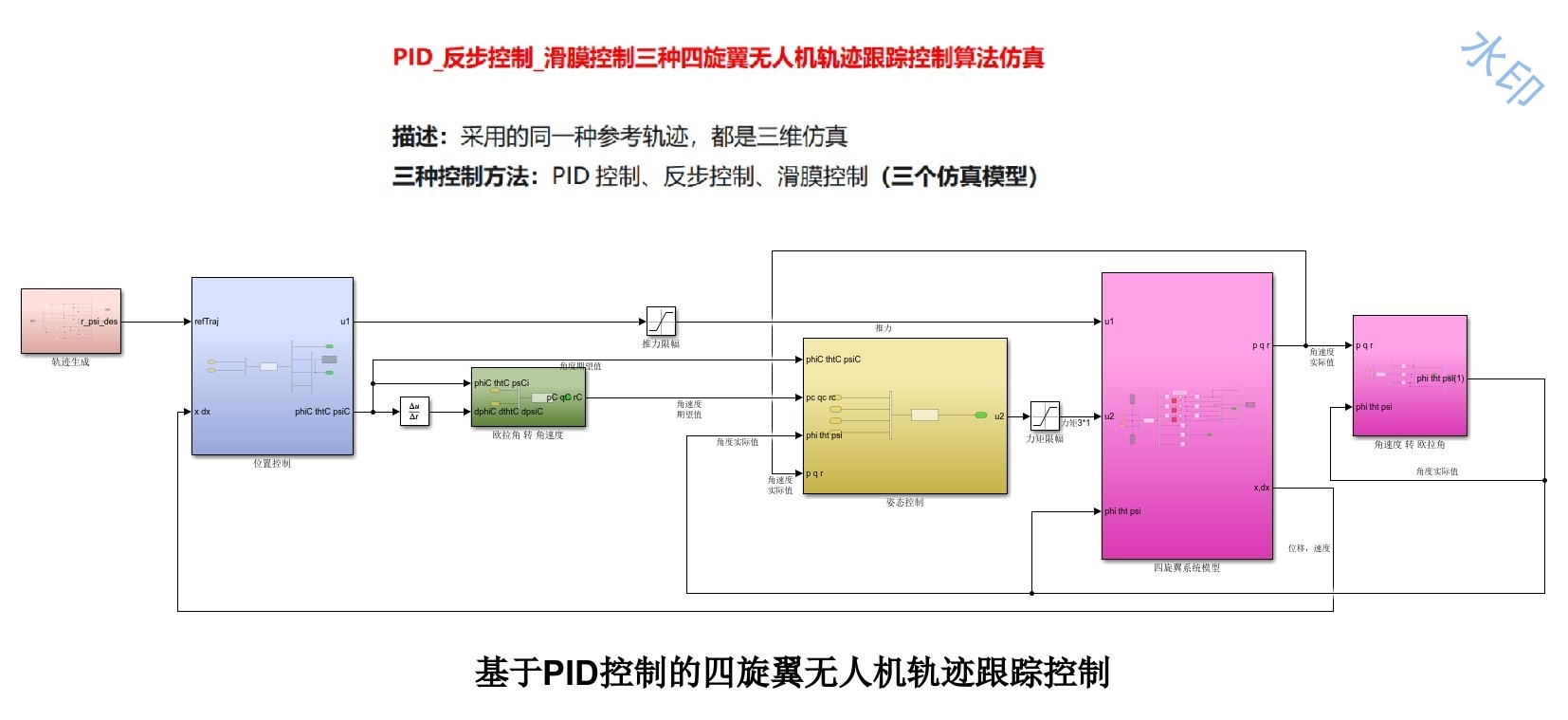
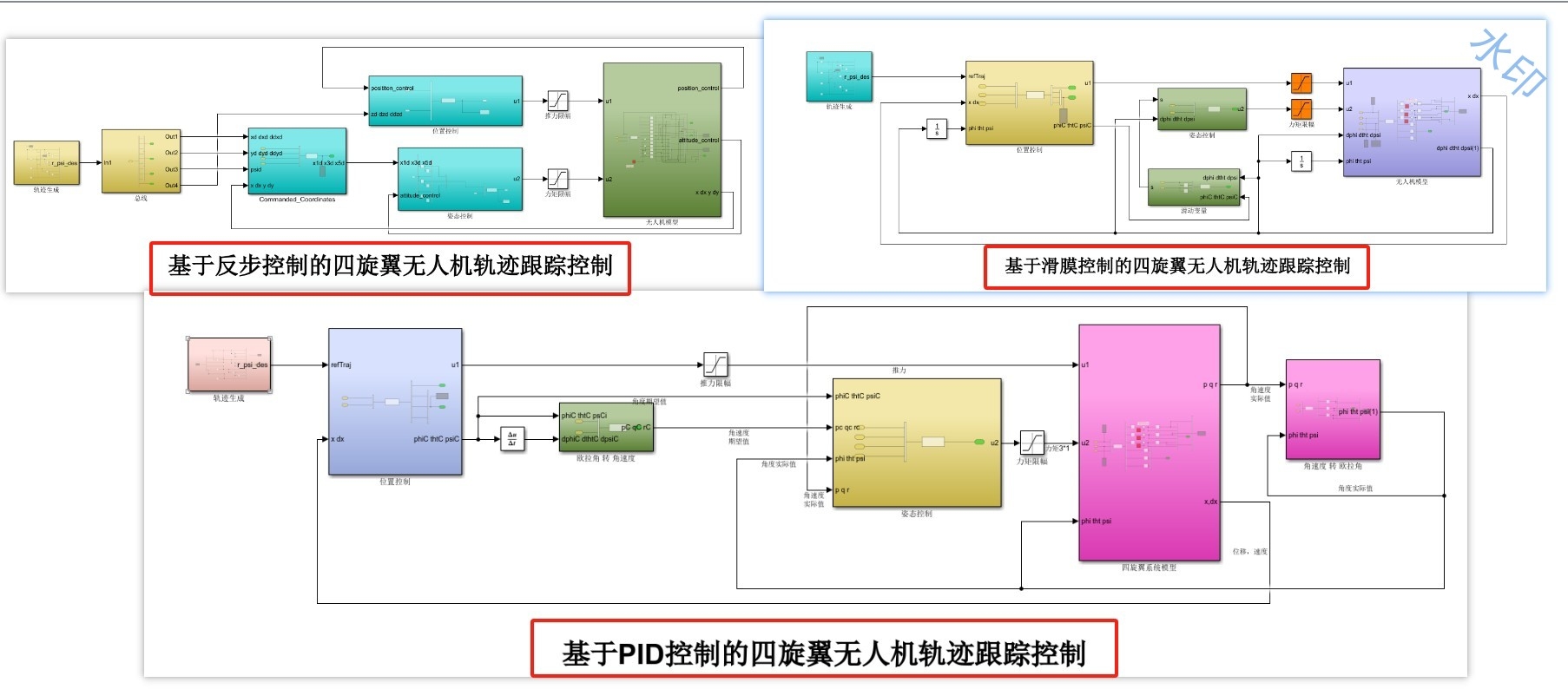
(一)PID反步控制仿真模型
为了全面分析PID反步控制在无人机轨迹跟踪中的应用,我们采用了一种简化的三维仿真模型。在仿真过程中,我们采用了相同的参考轨迹,以确保结果的可靠性。
- 模型构建
在仿真过程中,我们首先定义了无人机、路径规划算法、PID控制器等关键参数。然后,通过设定无人机在不同轨迹路径下的运动状态,模拟其在实际环境中的行为。
- 参数设置与调整
在PID反步控制仿真中,我们根据实际需求设置了PID控制器的参数,如比例系数、积分系数和微分系数等。同时,为了实现轨迹跟踪的效果,我们还加入了滑膜控制的辅助策略。
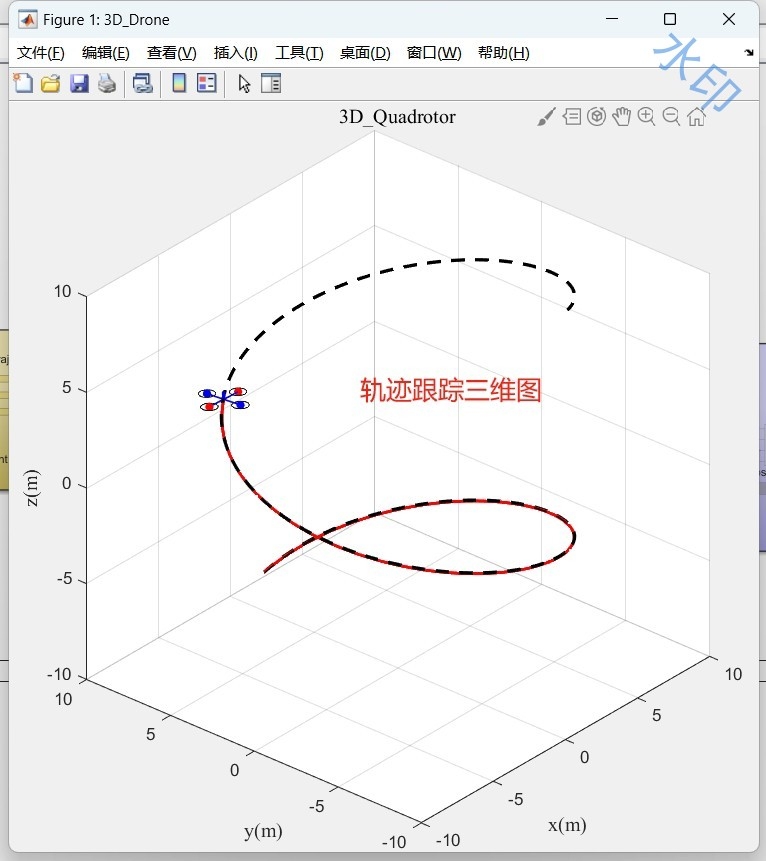
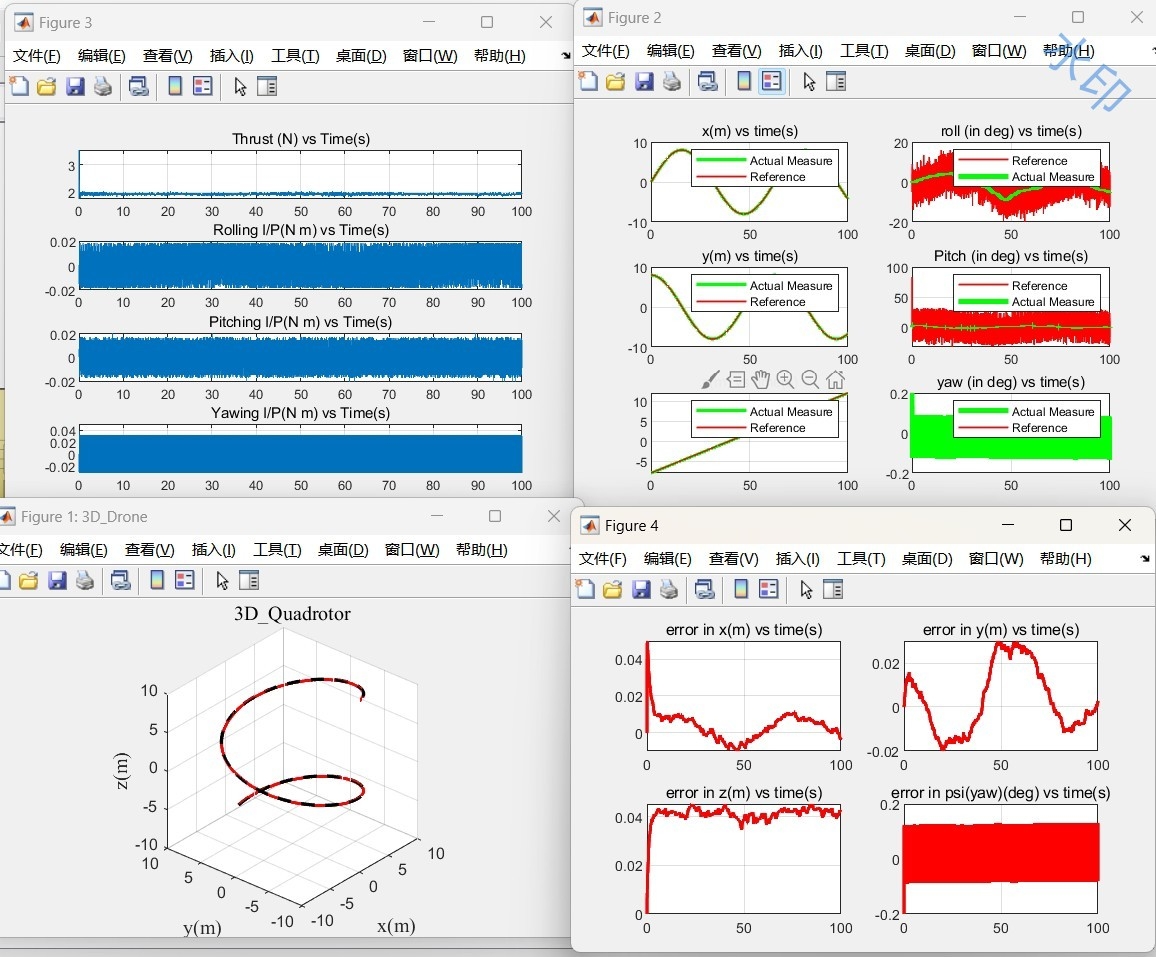
- 三维仿真展示
通过运行三维仿真模型,我们可以直观地观察到无人机在不同轨迹路径下的运动状态,包括其姿态、速度、加速度等关键参数的变化。此外,还可以通过仿真结果来评估PID反步控制算法在实际应用中的效果。
(二)滑膜控制仿真模型
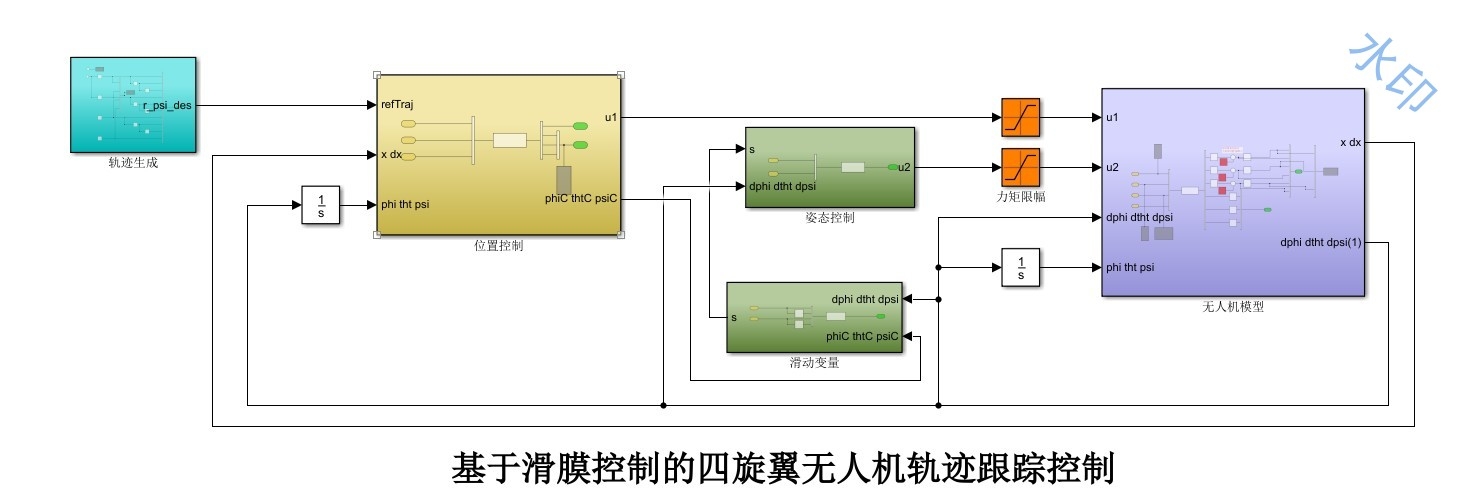
滑膜控制是一种基于动态特性的控制策略,它通过在线实时调整控制参数来优化的动态性能。在本次仿真中,我们同样构建了滑膜控制的三维仿真模型。
- 模型构建
在滑膜控制仿真模型中,我们同样定义了无人机、路径规划算法等关键参数。然后,通过设定滑膜控制的参数调整规则和动态响应特性,模拟无人机在特定轨迹路径下的动态响应过程。
- 参数调整与仿真结果分析
在滑膜控制仿真中,我们主要关注了滑膜控制的参数调整对无人机轨迹跟踪效果的影响。通过调整滑膜控制的参数,我们可以优化无人机的动态响应性能,提高其在特定轨迹路径下的跟踪精度和稳定性。
(三)总结与展望
通过本次仿真分析,我们可以看到PID反步控制和滑膜控制这两种轨迹跟踪控制算法在无人机轨迹跟踪中的应用效果。两种算法在不同应用场景下都有其独特的优势和适用性。在实际应用中,我们可以根据具体需求选择合适的控制算法来提高无人机的轨迹跟踪精度和稳定性。
同时,我们也期待未来能够进一步研究和发展更多的无人机轨迹跟踪控制算法,为无人机技术的发展和应用提供更多的可能性。此外,我们也希望相关领域的专家和学者能够继续关注无人机技术的发展,为无人机技术的进步和应用做出更多的贡献。
三、文献资料(PPT格式)准备
为了更好地支持本次技术博客文章的内容展示,我们准备了相关的文献资料(PPT格式)。这些文献资料主要包含以下内容:
- PID控制算法的相关研究论文;
- 反步控制算法的相关研究论文;
- 滑膜控制算法的相关研究论文;
- 四旋翼无人机轨迹跟踪的实际应用案例;
- 三维仿真模型的搭建过程与关键参数设置指南;
- 三维图形的展示与分析结果。
四、结论
本次技术博客文章围绕PID反步控制和滑膜控制这两种轨迹跟踪控制算法展开详细的分析与仿真。通过构建三维仿真模型并展示仿真结果,我们可以更好地理解这两种算法在无人机轨迹跟踪中的应用效果。同时,我们也期待相关领域的专家和学者能够继续关注无人机技术的发展,为无人机技术的进步和应用做出更多的贡献。
PID_反步控制_滑膜控制三种四旋翼无人机轨迹跟踪控制算法仿真
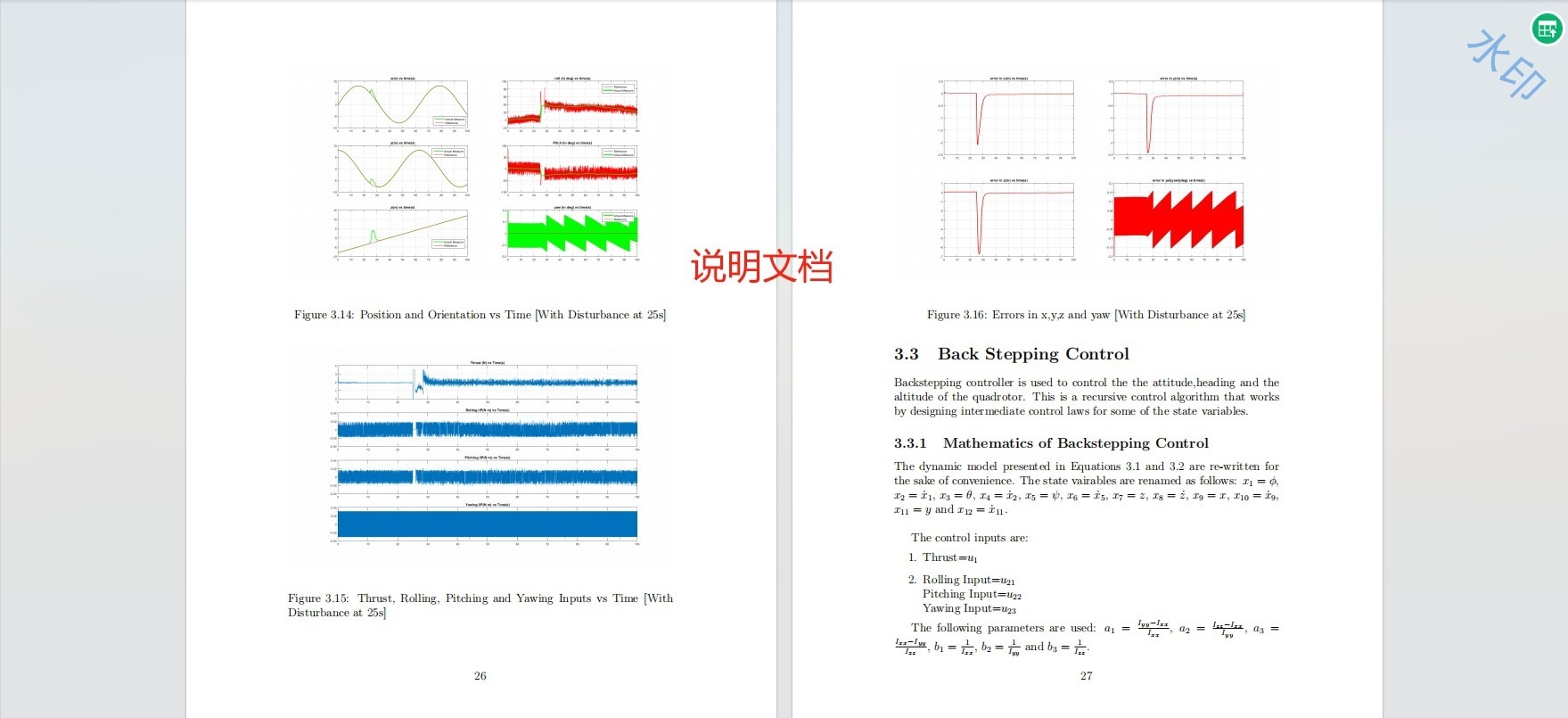
附带对应的说明文档,提供建模过程与仿真结果文献(英文)PPT
描述:采用的同一种参考轨迹,都是三维仿真
三种控制方法:
[1]PID控制、[2]反步控制、[3]滑膜控制(三个仿真模型)
每个仿真均应用了同一种轨迹路径,直接运行即可出三维图,可以实现四旋翼无人机轨迹的跟踪




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









