代码
#include <stdlib.h>
#include <string.h>
#include <curses.h>
#include <signal.h>
#include <sys/time.h>
#define ROW_SMALL 10
#define COL_SMALL 10
#define ROW_LARGE 20
#define COL_LARGE 20
#define MODE_SMALL 1
#define MODE_LARGE 2
#define MINE_SMALL 10
#define MINE_LARGE 20
#define MINE 1
#define FLAG 2
#define PRESSED 1
#define RELEASED 2
#define WIN 1
#define LOSE 2
#define CHAR_BLANK ' '
#define CHAR_MINE '*'
#define CHAR_FLAG '?'
#define CHAR_ROW_SMALL_1 "------------"
#define CHAR_ROW_SMALL_2 "| |"
#define CHAR_ROW_LARGE_1 "----------------------"
#define CHAR_ROW_LARGE_2 "| |"
int win();
void game_over_splash();
void human_over(int flag);
void clear_cursor();
void draw_cursor();
void move_up();
void move_down();
void move_left();
void move_right();
void play();
int boom();
void set_flag(int state);
void generate_mine();
void select_mode();
void draw_map();
void draw_time();
void draw_flag();
int in_map(int y, int x);
void show_num(int y, int x);
void timer(int sig);
void game_over();
void init();
void init_game();
int set_ticker(int n_msec);
struct weiyi {
int x, y;
};
int mode;
int flag_cnt, flag_success;
unsigned long cur_time, min_time_small, min_time_large;
int cursor_x, cursor_y;
int old_x, old_y;
int map_small[ROW_SMALL][COL_SMALL];
int map_large[ROW_LARGE][COL_LARGE];
int visited[ROW_LARGE][COL_LARGE];
struct weiyi around[9] = {
-1,-1, 0,-1, 1,-1,
-1,0, 0,0, 1,0,
-1,1, 0,1, 1,1
};
int main()
{
init();
play();
return 0;
}
void play()
{
int ch;
while (1) {
ch = getch();
switch (ch) {
case 'W':
case 'w':
move_up();
break;
case 'S':
case 's':
move_down();
break;
case 'A':
case 'a':
move_left();
break;
case 'D':
case 'd':
move_right();
break;
case ' ':
attroff(A_STANDOUT);
show_num(cursor_y, cursor_x);
memset(visited, 0, sizeof(int)*ROW_LARGE*COL_LARGE);
draw_cursor();
break;
case 'Z':
case 'z':
if ((old_x != cursor_x) || (old_y != cursor_y)) {
set_flag(PRESSED);
}
else {
set_flag(RELEASED);
old_x = cursor_x;
old_y = cursor_y;
}
break;
case 'Q':
case 'q':
init_game();
break;
default:
break;
}
}
}
int boom()
{
if (MODE_SMALL == mode) {
if (MINE == map_small[cursor_y-1][cursor_x-1])
return 1;
return 0;
}
else if (MODE_LARGE == mode) {
if (MINE == map_large[cursor_y-1][cursor_x-1])
return 1;
return 0;
}
}
void set_flag(int state)
{
move(cursor_y, cursor_x);
if (PRESSED == state) {
flag_cnt ++;
addch(CHAR_FLAG);
}
else if (RELEASED == state) {
flag_cnt --;
addch(CHAR_BLANK);
}
refresh();
draw_flag();
if (MODE_SMALL == mode) {
if ((PRESSED == state) &&
(map_small[cursor_y-1][cursor_x-1]))
flag_success ++;
else if ((PRESSED == state) &&
(map_small[cursor_y-1][cursor_x-1]))
flag_success --;
}
else if (MODE_LARGE == mode) {
if ((PRESSED == state) &&
(map_large[cursor_y-1][cursor_x-1]))
flag_success ++;
else if ((PRESSED == state) &&
(map_large[cursor_y-1][cursor_x-1]))
flag_success --;
}
if (win()) {
human_over(WIN);
}
}
int in_map(int y, int x)
{
if (y < 1)
return 0;
if (x < 1)
return 0;
if (MODE_SMALL == mode) {
if (y > ROW_SMALL)
return 0;
if (x > COL_SMALL)
return 0;
}
else if (MODE_LARGE == mode) {
if (y > ROW_LARGE)
return 0;
if (x > COL_LARGE)
return 0;
}
return 1;
}
int win()
{
if (MODE_SMALL == mode)
return ((MINE_SMALL == flag_success) &&
(MINE_SMALL == flag_cnt));
else if (MODE_LARGE == mode)
return ((MINE_LARGE == flag_success) &&
(MINE_LARGE == flag_cnt));
}
void game_over_splash()
{
int i, j;
if (MODE_SMALL == mode) {
for (i = 0; i < ROW_SMALL; i ++) {
for (j = 0; j < COL_SMALL; j ++) {
if (map_small[i][j]) {
move(i+1, j+1);
addch(CHAR_MINE);
}
}
}
}
else if (MODE_LARGE == mode) {
for (i = 0; i < ROW_LARGE; i ++) {
for (j = 0; j < COL_LARGE; j ++) {
if (map_large[i][j]) {
move(i+1, j+1);
addch(CHAR_MINE);
}
}
}
}
refresh();
}
void show_num(int y, int x)
{
int i, cnt = 0;
int x0, y0;
if (boom()) {
game_over_splash();
human_over(LOSE);
return;
}
if (win()) {
human_over(WIN);
}
for (i = 0; i < 9; i ++) {
x0 = x + around[i].x;
y0 = y + around[i].y;
if (in_map(y0, x0)) {
if ((MODE_SMALL == mode) &&
(map_small[y0-1][x0-1] == MINE)) {
cnt ++;
}
else if ((MODE_LARGE == mode) &&
(map_large[y0-1][x0-1] == MINE)) {
cnt ++;
}
}
}
move(y, x);
addch('0'+cnt);
refresh();
visited[y-1][x-1] = 1;
if (0 == cnt) {
for (i = 0; i < 9; i ++) {
x0 = x + around[i].x;
y0 = y + around[i].y;
if (in_map(y0, x0) && !visited[y0-1][x0-1]) {
show_num(y0, x0);
}
}
}
}
void clear_cursor()
{
char ch;
move(cursor_y, cursor_x);
attroff(A_STANDOUT);
ch = (char)inch();
addch(ch);
refresh();
}
void draw_cursor()
{
char ch;
move(cursor_y, cursor_x);
ch = (char)inch();
attron(A_STANDOUT);
addch(ch);
refresh();
}
void move_up()
{
clear_cursor();
if (cursor_y > 1)
cursor_y --;
draw_cursor();
}
void move_down()
{
clear_cursor();
if (MODE_SMALL == mode) {
if (cursor_y < ROW_SMALL)
cursor_y ++;
}
else if (MODE_LARGE == mode) {
if (cursor_y < ROW_LARGE)
cursor_y ++;
}
draw_cursor();
}
void move_left()
{
clear_cursor();
if (cursor_x > 1)
cursor_x --;
draw_cursor();
}
void move_right()
{
clear_cursor();
if (MODE_SMALL == mode) {
if (cursor_x < COL_SMALL)
cursor_x ++;
}
else if (MODE_LARGE == mode) {
if (cursor_x < COL_LARGE)
cursor_x ++;
}
draw_cursor();
}
void timer(int sig)
{
static int cnt = 0;
if (cnt >= 1) {
cnt = 0;
cur_time ++;
draw_time();
}
else {
cnt ++;
}
}
void draw_flag()
{
attroff(A_STANDOUT);
if (MODE_SMALL == mode) {
move(5, COL_SMALL+3);
printw("flag number : %d", flag_cnt);
}
else if (MODE_LARGE == mode) {
move(5, COL_LARGE+3);
printw("flag number : %d", flag_cnt);
}
refresh();
attron(A_STANDOUT);
}
void draw_time()
{
attroff(A_STANDOUT);
if (MODE_SMALL == mode) {
move(0, COL_SMALL+3);
printw("time : %d hours %d minutes %d seconds",
cur_time/3600, cur_time%3600/60, cur_time%3600%60);
move(2, COL_SMALL+3);
printw("record : %d hours %d minutes %d seconds",
min_time_small/3600, min_time_small%3600/60,
min_time_small%3600%60);
}
else if (MODE_LARGE == mode) {
move(0, COL_LARGE+3);
printw("time : %d hours %d minutes %d seconds",
cur_time/3600, cur_time%3600/60, cur_time%3600%60);
move(2, COL_LARGE+3);
printw("record : %d hours %d minutes %d seconds",
min_time_large/3600, min_time_large%3600/60,
min_time_large%3600%60);
}
refresh();
attron(A_STANDOUT);
}
void draw_map()
{
int i;
clear();
if (MODE_SMALL == mode) {
move(0, 0);
printw(CHAR_ROW_SMALL_1);
for (i = 1; i <= ROW_SMALL; i ++) {
move(i, 0);
printw(CHAR_ROW_SMALL_2);
}
move(i, 0);
printw(CHAR_ROW_SMALL_1);
}
else if (MODE_LARGE == mode) {
move(0, 0);
printw(CHAR_ROW_LARGE_1);
for (i = 1; i <= ROW_LARGE; i ++) {
move(i, 0);
printw(CHAR_ROW_LARGE_2);
}
move(i, 0);
printw(CHAR_ROW_LARGE_1);
}
refresh();
}
void select_mode()
{
int ch, flag;
clear();
move(0, 10);
printw("Select Mode");
move(3, 10);
printw("1. Small (1)");
move(5, 10);
printw("2. Large (2)");
move(7, 10);
printw("3. Quit (3)");
flag = 1;
while(flag) {
ch = getch();
switch (ch) {
case '1':
mode = MODE_SMALL;
flag = 0;
break;
case '2':
mode = MODE_LARGE;
flag = 0;
break;
case '3':
game_over();
flag = 0;
break;
default:
break;
}
}
}
void human_over(int flag)
{
set_ticker(0);
clear_cursor();
if (MODE_SMALL == mode) {
move(ROW_SMALL+3, 0);
if (WIN == flag) {
if (cur_time < min_time_small) {
printw("New Time Record : \
%d hours %d minutes %d seconds",
cur_time/3600,
cur_time%3600/60,
cur_time%3600%60);
min_time_small = cur_time;
}
else {
printw("You Win!");
}
}
else if (LOSE == flag) {
printw("You Lose!");
}
}
else if (MODE_LARGE == mode) {
move(ROW_LARGE+3, 0);
if (WIN == flag) {
if (cur_time < min_time_large) {
printw("New Time Record : \
%d hours %d minutes %d seconds",
cur_time/3600,
cur_time%3600/60,
cur_time%3600%60);
min_time_large = cur_time;
}
else {
printw("You Win!");
}
}
else if (LOSE == flag) {
printw("You Lose!");
}
}
refresh();
sleep(3);
init_game();
}
void game_over()
{
endwin();
exit(0);
}
void generate_mine()
{
int i, j, k;
if (MODE_SMALL == mode) {
for (k = 0; k < MINE_SMALL; ) {
i = rand() % ROW_SMALL;
j = rand() % COL_SMALL;
if (map_small[i][j] != MINE) {
map_small[i][j] = MINE;
k ++;
}
else {
continue;
}
}
}
else if (MODE_LARGE == mode) {
for (k = 0; k < MINE_LARGE; ) {
i = rand() % ROW_LARGE;
j = rand() % COL_LARGE;
if (map_large[i][j] != MINE) {
map_large[i][j] = MINE;
k ++;
}
else {
continue;
}
}
}
}
void init()
{
initscr();
clear();
cbreak();
noecho();
curs_set(0);
srand(time(0));
signal(SIGALRM, timer);
min_time_large = min_time_small = ~0;
init_game();
}
void init_game()
{
set_ticker(0);
attroff(A_STANDOUT);
select_mode();
if (MODE_SMALL == mode)
memset(map_small, 0, sizeof(int)*ROW_SMALL*COL_SMALL);
else if (MODE_LARGE == mode)
memset(map_large, 0, sizeof(int)*ROW_LARGE*COL_LARGE);
draw_map();
generate_mine();
cursor_x = (MODE_SMALL == mode) ? COL_SMALL/2+1 : COL_LARGE/2+1;
cursor_y = (MODE_SMALL == mode) ? ROW_SMALL/2+1 : ROW_LARGE/2+1;
old_x = cursor_x;
old_y = cursor_y;
draw_cursor();
cur_time = 0;
flag_cnt = 0;
flag_success = 0;
set_ticker(500);
draw_time();
draw_flag();
}
int set_ticker(int n_msec)
{
struct itimerval timeset;
long n_sec, n_usec;
n_sec = n_msec / 500;
n_usec = (n_msec % 500) * 1000L;
timeset.it_interval.tv_sec = n_sec;
timeset.it_interval.tv_usec = n_usec;
timeset.it_value.tv_sec = n_sec;
timeset.it_value.tv_usec = n_usec;
return setitimer(ITIMER_REAL, ×et, NULL);
}
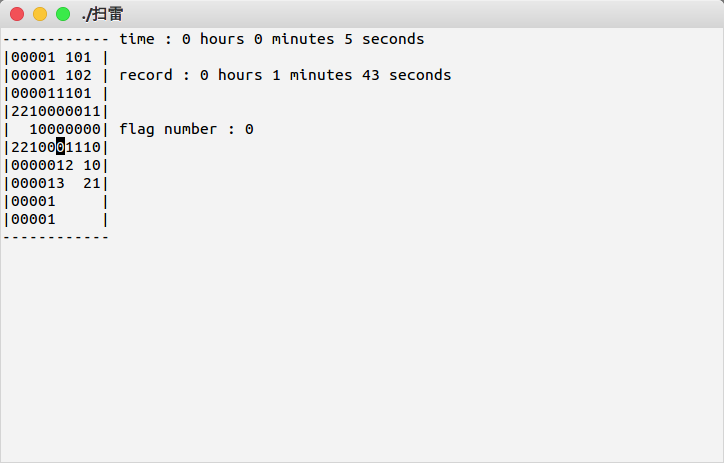
结果
视频
c语言小游戏























 3万+
3万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









