






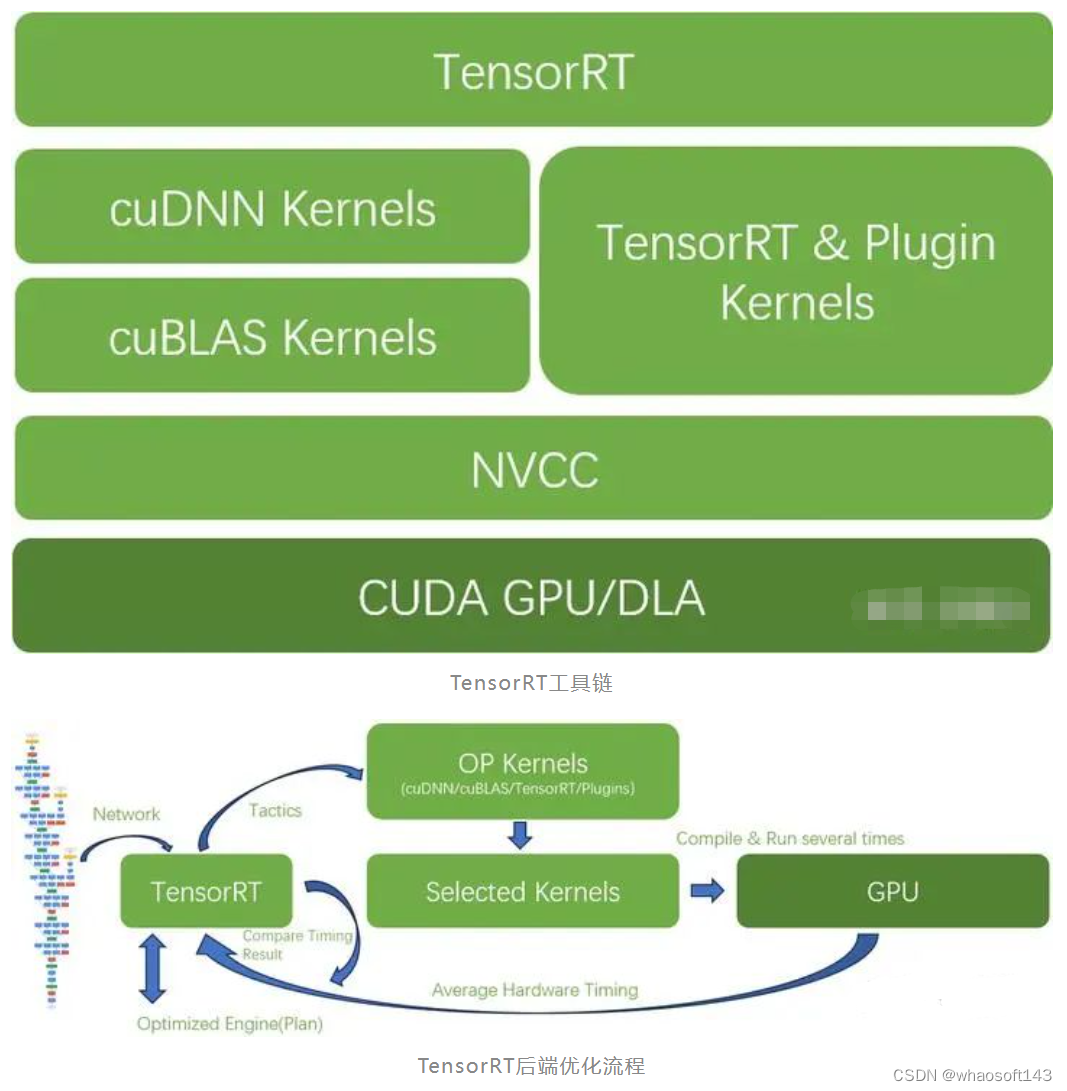
这里讲述TRT是如何做到比其他框架更快的,总结了TensorRT工具链以及TensorRT后端优化流程。
2016年Nvidia为自家GPU加速推理而提供的SDK,人们有时也把它叫做推理框架。
#为什么?
只有Nvidia最清楚自家GPU或DLA该如何优化,所以TensorRT跑网络的速度是最快的,比直接用Pytorch快N倍。
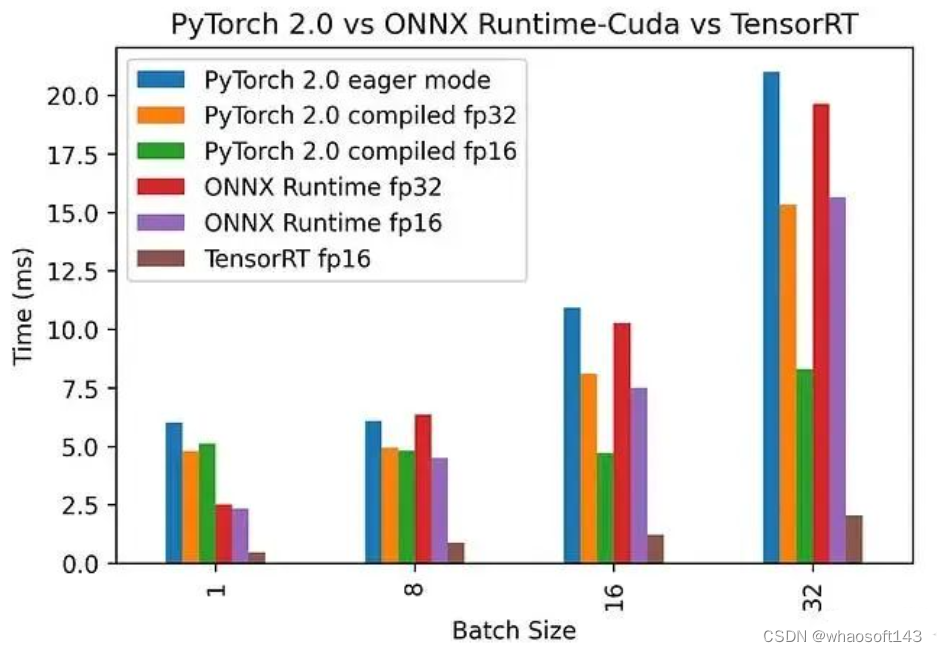
遥遥领先的TensorRT
#怎么做到的?
1. 搜索整个优化空间
与Pytorch等其它训练框架最大区别是,TensorRT的网络优化算法是基于目标GPU所做的推理性能优化,而其它框架一方面需要综合考虑训练和推理,更重要的是它们没有在目标GPU上做针对性的优化。
TensorRT又是如何针对目标GPU优化的呢?
简单讲就是在可能的设计空间中搜索出全局最优解。
这个搜索空间有哪些变量呢?
比如CUDA架构中的编程模型所对应的,将tensor划分为多少个block?以及这些block如何组织到Grid中
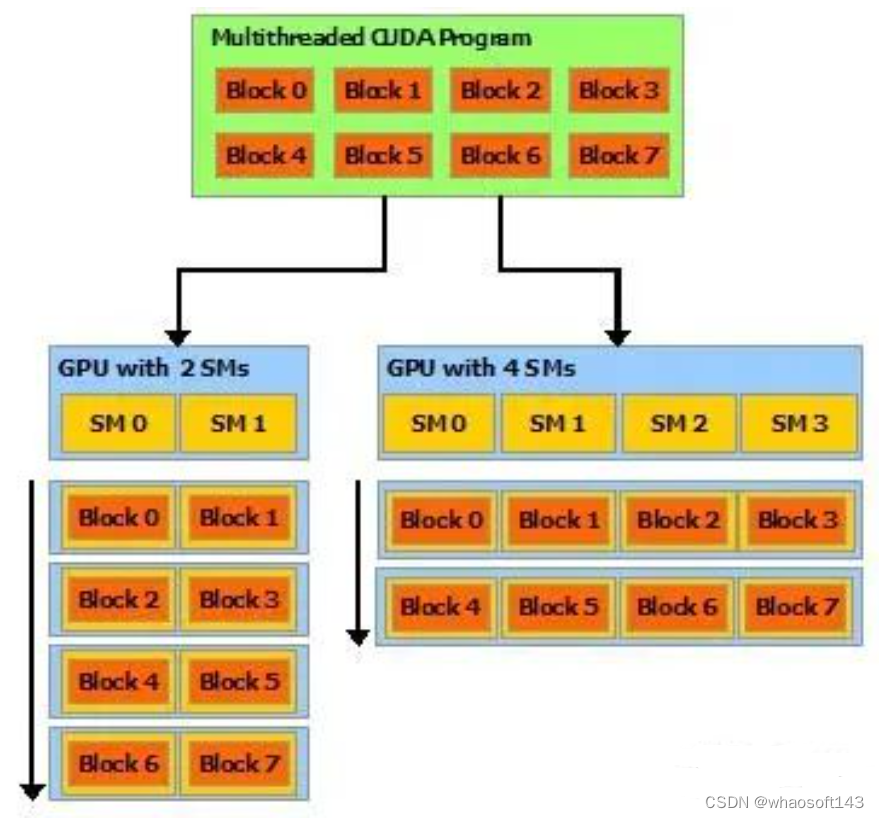
任务被划分为多个Block
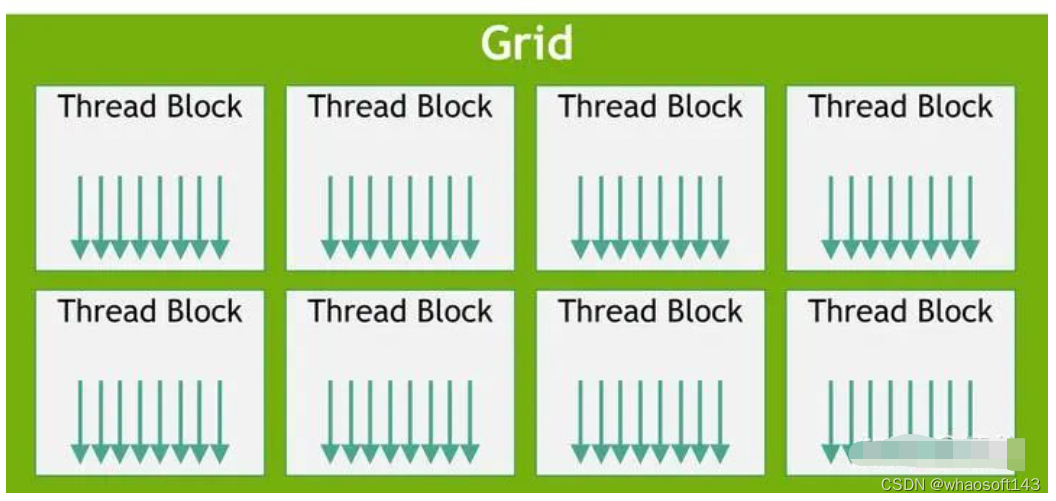
Block以Grid的方式组织起来
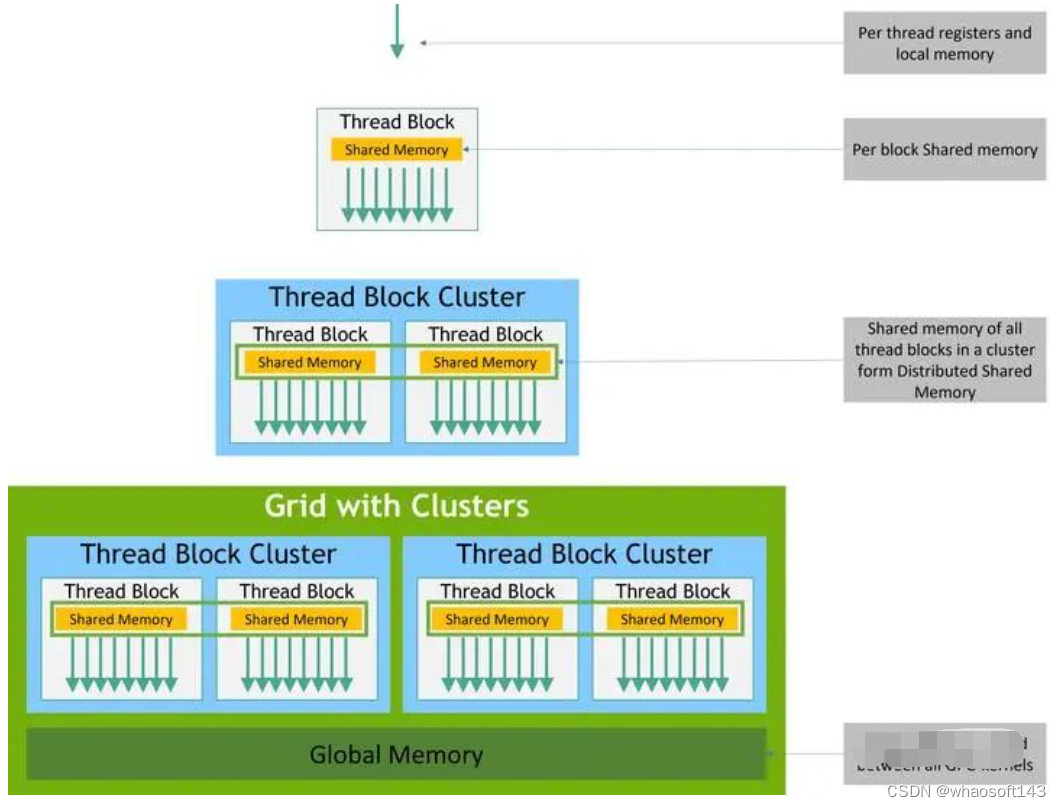
不同的组织层次以对应不同的存储体系结构中的不同存储器
再举例,使用什么样的指令完成计算,可能是FFMA、FMMA,可能是TensorCore指令...
更难的部分可能是tensor数据流的调度,把他们放在local、share还是global memory呢?如何摆放呢?
这些变量组合在一起是一个巨大的搜索空间,可能你的CPU计算几天也得不出个结果来。
但是我们知道神经网络的计算是由一个个粒度更大的算子组成的,算子上面还有粒度更大的层结构。我们也清楚地知道层与层之间相对独立,也就是说可以针对每层计算优化,最后把优化后的层串在一起大概率就是网络的全局最优解。
于是,TensorRT预先写了很多算子和层(CUDA Kernel)。当然这些算子的输入和输出tensor是可以配置的,以适应网络输入和输出的不同以及GPU资源的不同。
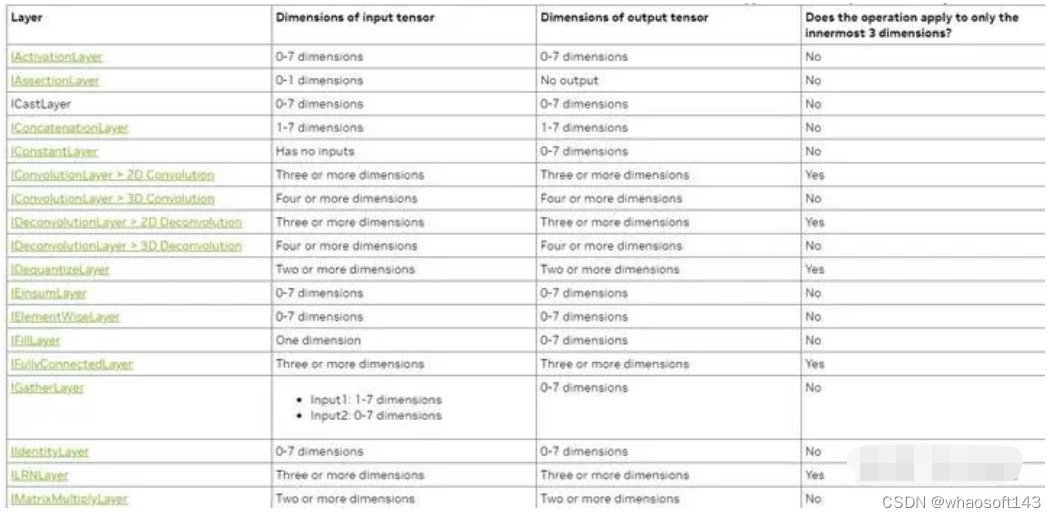
部分优化好的算子
搜索空间变小了,从原来的指令级别的搜索,上升到了算子级别的搜索。因为这些实现都是用CUDA kernel所写,更准确的说是Kernel级别的搜索了。
但是tensor数据流的调度问题并没有解决,这也是最关键和复杂的地方。我们应该将输入tensor划分为多少个Block呢?这些Blocks应该分配给多少个线程呢?tensor存储在哪呢?local/share/global memory的哪些地方呢?中间计算结果存储在哪里呢?
对于计算部分是可以通过模拟的方式(类似指令集仿真器)计算得到性能的,但是tensor数据流在share/L2/Global Memory的流动过程就很难通过仿真计算得到精确结果,因为要被模拟的数据量和线程数过大,何况要尝试的可能性还很多,靠CPU仿真计算的思路就别想了。唯一办法就是让候选算子在目标GPU上直接跑跑,统计出性能,最后通过比对选出最优解。TensorRT把这个过程叫做Timing,TensorRT甚至可以将优化的中间过程存储下来供你分析,叫做timing caching(通过trtexec --timingCacheFile=<file>)。
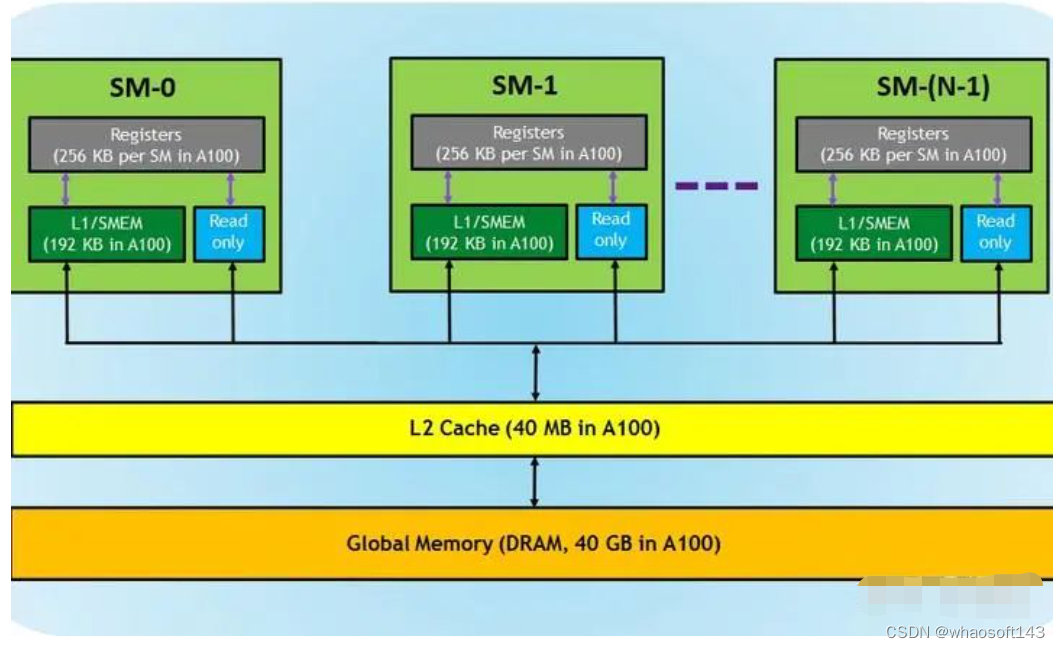
Nvida GPU memory架构
以上所描述的优化过程可以叫做Hardware Aware Optimazation
总结起来优化器会重点分析:
- Type of hardware(Hardware capability...)
- Memory footprint(Share, Cache, Global...)
- Input and output shape
- Weight shapes
- Weight sparsity
- Level of quantization (so, reconsider memory)
而这些是Pytorch等框架不会去深入挖掘的,尤其是对存储系统的优化。
2. 强制选择Kernel
由于Block之间线程的运行顺序是随机的,CPU可能在向GDDR/HBM读写数据,甚至GPU的时钟频率也在随负载的变化而变化,这导致了不同系统运行环境下GPU的性能表现会有差异。这种差异也可能导致TensorRT Timing的最优解不是实际推理时的最优解,可能选择了次优的Kernel。
TensorRT提供了一个补救方法,就是强制指定选择某个Kernel实现,如果你很确信它是最优解的话。
TensorRT提供的API叫做AlgorithmSelector
3. Plugin
当然,你对自己设计的算子更有把握,可以自己写Kernel,然后指定使用它
不过更多情况下,是因为发现TensorRT不支持某个算子,你才被迫去写Kernel,毕竟CUDA编程不简单,何况性能还需要足够好。
4. cuBLAS和cuDNN
TensorRT安装指导要求你先安装CUDA SDK和cuDNN
CUDA SDK需要安装是显而易见的,因为TensorRT所调用的Kernel需要NVCC编译器来编译成Nvidia GPU的汇编指令序列啊
但是CUDA SDK中还有一个cuBLAS库也是被TensorRT所依赖的,我们知道C++库BLAS(Basic Linear Algebra Subprograms),它是针对CPU进行的线性代数计算优化,那么cuBLAS就是针对CUDA GPU开发的线性代数计算库,它的底层当然也就是用CUDA Kernel写成的。典型的矩阵乘法算子就可以直接调用cuBLAS了。
cuBLAS开发的很早,应该是CUDA生态最早的一批库了吧,但是随着深度学习的普及,Nvidia又在生态中加入了cuDNN库,它的层次更高,封装了到了网络层,所以其实TensorRT也可以直接调用优化好的cuDNN库中的Kernel?是也不是
TensorRT可以选择所谓Tactic(策略)来决定是使用TensorRT写的Kernel还是cuBLAS和cuDNN的
5. Tactic
TensorRT的Tactic能决定很多优化选项
例如,每次timing某个算子时需要平均的运行次数。缺省TensorRT会运行四次,以降低不确定性带来的误差,但这个次数是可以修改的。
还可以决定上面提到的Kernel库的选择,Plugin的选择,GPU时钟频率锁定等。
6. 量化
TensorRT当然具备网络量化能力,提供了将全网都量化到int8的隐性量化方式,也提供了插入Q/DQ Layer的显性量化方式。
混合量化是Nvidia做的很优秀的地方,这对于高效利用计算资源起到了重要作用,不过,这个另外的话题,以后有机会再谈。
7. 多应用推理和多卡推理
其实这才是Nvidia强悍的地方,在友商都在谈单卡性能时,其实多卡或多节点才是Nvidia的杀手锏
另外,对于单卡性能富余的情况下,可能希望有多个流并行推理,这个对于TensorRT来说也是必须支持的
#TensorRT的内核到底是什么?
答:根据网络、输入、输出tensor、目标GPU的资源,通过实际运行,在候选Kernel库中择优的一个Hardware Aware优化器。
#编译器
最后,如果非要套用编译器前后端理论的话,上述谈到的部分应该属于编译器后端部分了,因为它已经和底层硬件息息相关了。只不过它逻辑上处于于NVCC这个实体编译器的上层。而编译器前端,也就是与硬件不相关的图融合部分是也是在TensorRT的Builder内完成的。
最后送上两幅图,作为总结
最后在说一下这个
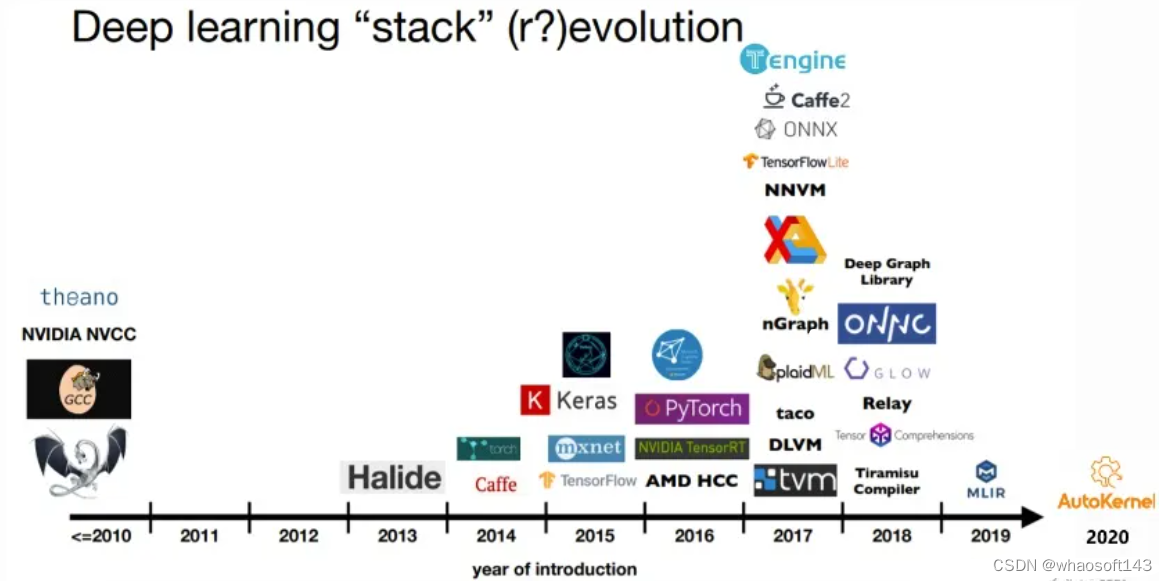
AI编译器入门
坏消息是
框架太多了,Pytorch、TensorFlow、Caffe、Mxnet、Keras、PaddlePaddle...
语言太多了,C/C++、Python、Java、Fortran...
XPU太多了,CPU、GPU、APU、DPU、TPU、NPU、GPGPU、FPGA、ASIC...

好消息是
AI开发框架大部分是基于Python语言的,当然很多也支持C、Java等,但至少我们的组合少了很多。
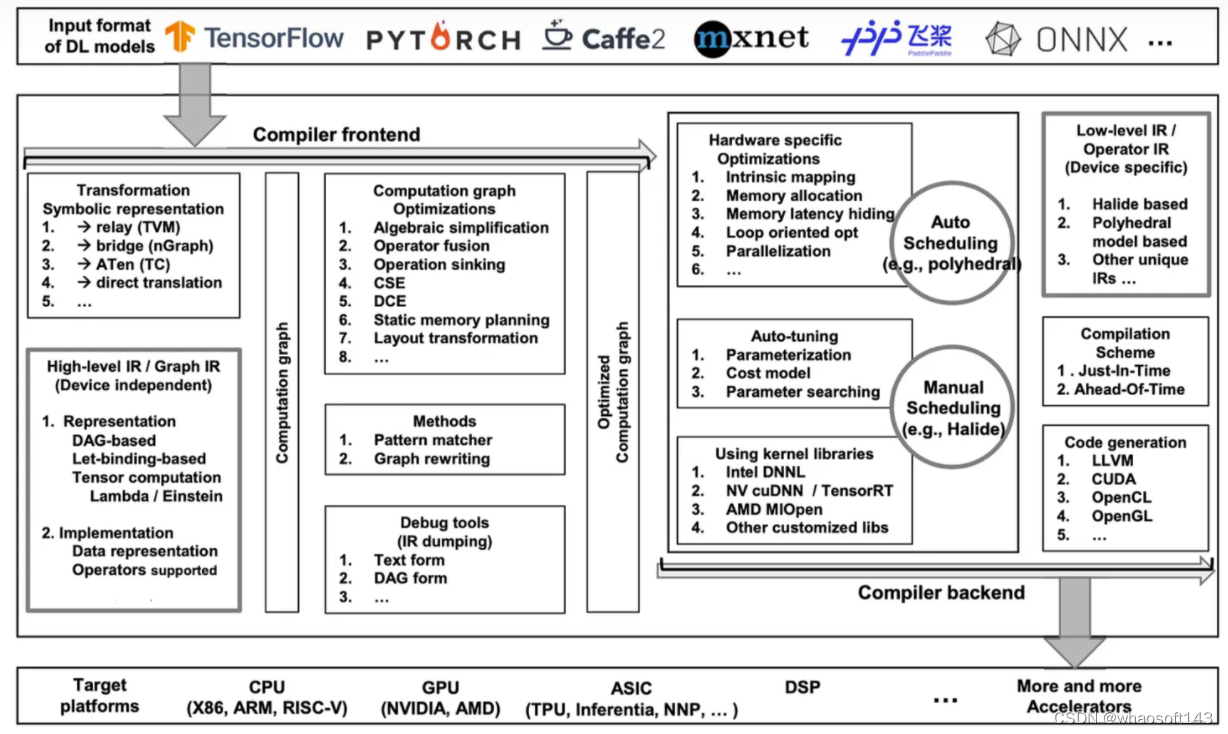
但是无论如何,AI开发者在采用不同框架、不同语言在不同目标device上部署的组合情况还是非常多,如果每个组合都开发一套编译器框架实在是太费力。那么该如何简化整个行业编译器的开发负担呢? 答案就是IR(Intermediate representation)。
宏观上讲,不同AI框架虽然有很多不同,但是他们最终都会生成神经网络结构,这些结构适合用图表示;不同编程语言语法有很多不同,但是他们都是在表达程序运行的数据移动、控制、计算、输出等;不同处理器虽然也有很大不同,但是他们大部分都是基于冯洛伊曼架构,即便FPGA、ASIC与众不同,也逃不过指令、数据流、控制、计算等基本要素。
既然有这么多共性,那么就可以在每一层次上做一个兼容的表达,所有框架都可以输出成一个图表达,所有编程语言都可以输出成某个数据结构表达。
IR不是个新东西,我们可以来看看历史。
以LLVM(low level virtual machine)为例来,它的输入是高级编程语言,输出是机器码。还含一系列模块和工具链。初略来说,LLVM由3个部分组成,前端、中端和后端。这个中端就是我们说的IR。
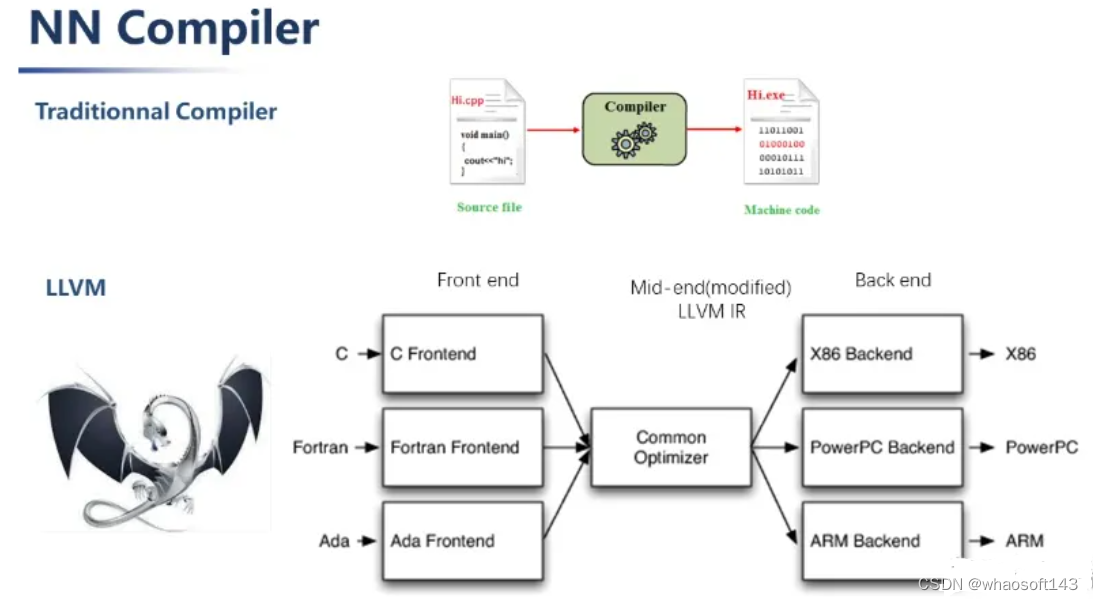
如果有一个新的编程语言需要在各种处理器上运行程序,那么它可以借用LLVM,并且只开发前端模块,前端模块将高级语言转化为LLVM IR,然后优化和各种处理器机器码生产的事就可以省了。
另一方面,如果有个新的处理器需要适配各种编程语言,那么它可以借用LLVM,并且只开发后端模块,并且和LLVM IR连接起来,然后前端和优化的事就可以省了。
这种方法,极大简化了编译器开发工作量,尤其在扩展性上非常优秀。
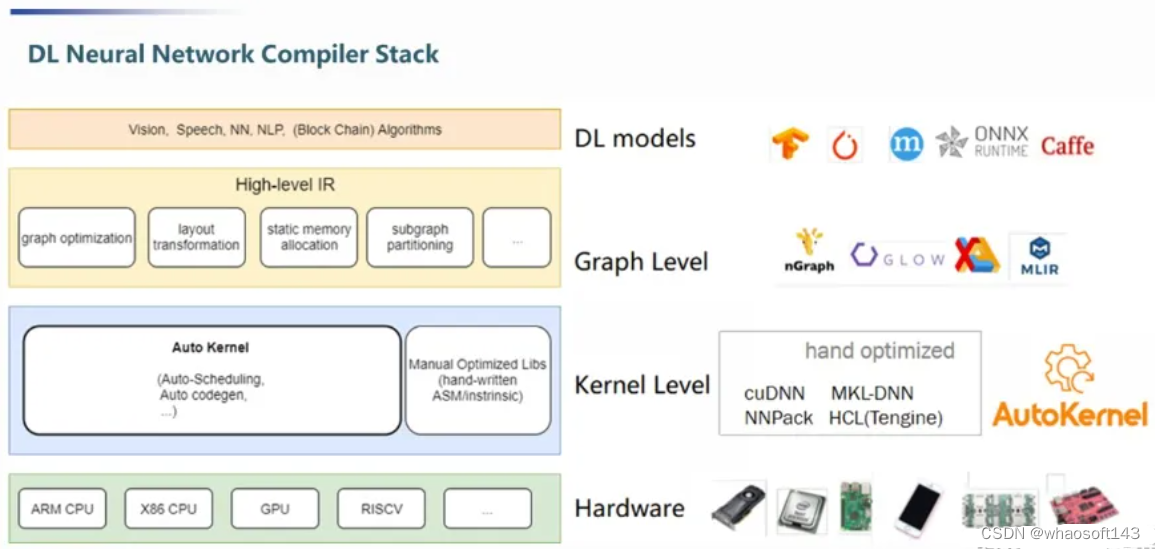
AI编译器分层思路
借鉴了LLVM传统编译器后,我们可以把AI编译器也按类似的思路分解为“语言/框架”“IR”“硬件”的层次结构,只不过,为了让IR更细分(LLVM也如此),还可以把IR分为与硬件无关和有关两个部分,这样的好处是能让框架输出的高层IR与硬件无关,高层IR的优化结果就可以被所有硬件所共享。说白了还是避免重复劳动嘛,人懒也是一种美德:)
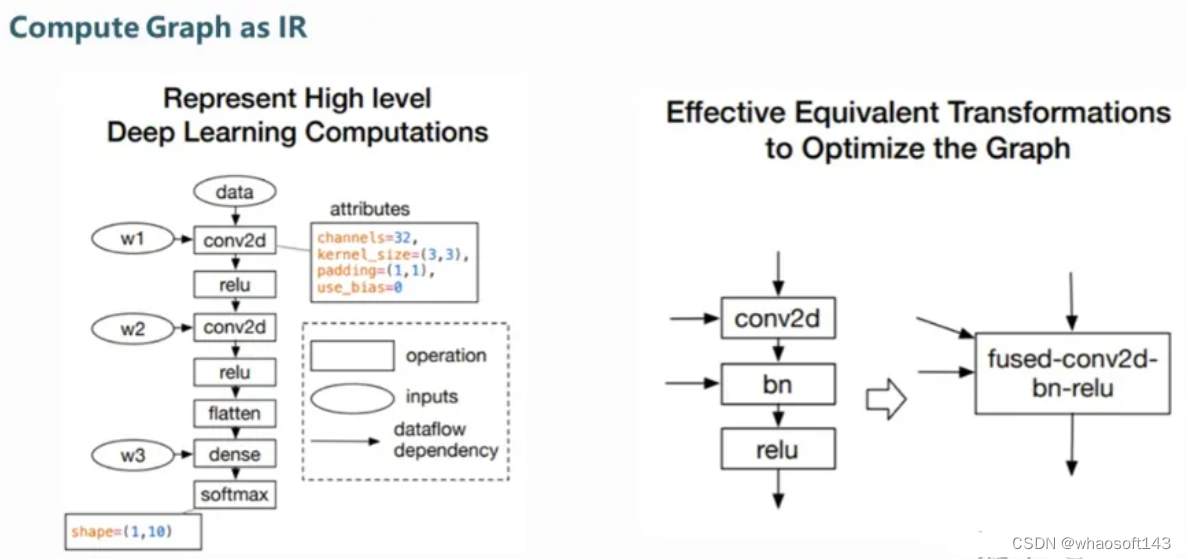
高层IR的抽象层次是以神经网络的“层”为出发点的,因为网络图优化的一个重要发力点就是“层”之间的融合,层之间的运行顺序,并行,以层为单位的数据载入、输出、存储分配等。
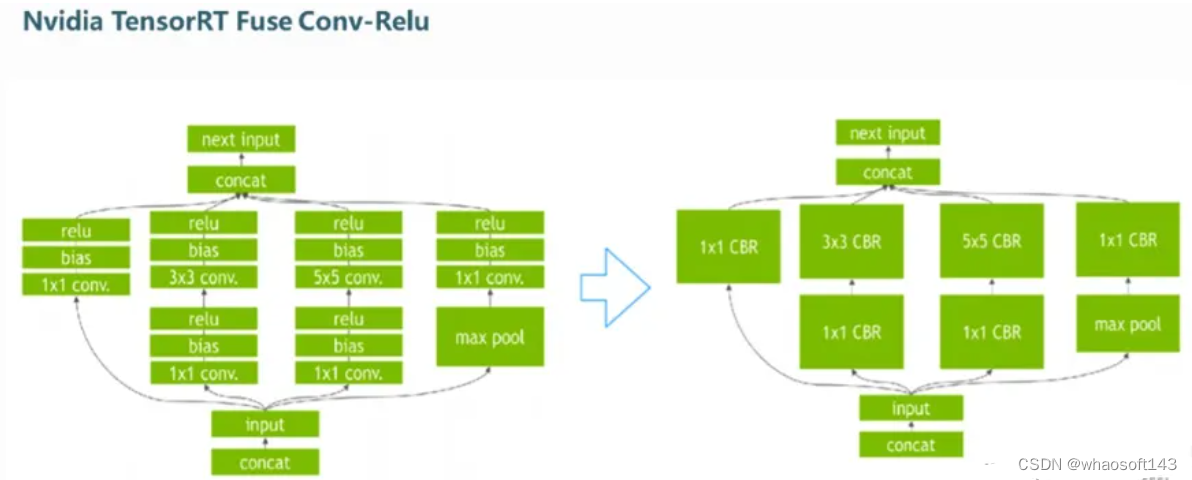
TensorRT层融合的例子
题外话,有人会问,层融合有什么好处?好处是,每层都是由输入和输出的,这个输入输出在处理器上会表现为数据的远距离搬运,可能是在处理器计算单元和Cache之间,也可能是计算单元和DDR之间,这取决于数据量的大小和Cache的大小,但是无论如何,数据搬运都是需要消耗时间和能量的。如果能合并某些层,数据就可能在计算单元内流动,而不会到Cache甚至DDR。
再往AI编译器层次结构下层走,是“算子”层也可以叫kernal层(大概率来自CUDA的语法)。网络的“层”是由“算子”组合而成的,所以这样的分法挺符合逻辑。但是我们理解其本质的区别还应该从是否硬件相关来看,因为这是IR分层的目的。算子层已经开始和底层硬件打交道,这部分的IR对接和优化需要处理器开发者提供,例如Intel的MKL, Nvidia的CuDNN和TensorRT,这些“libraries”是处理器开发者经过精细优化的高效算法,它们深度结合了处理器的特点。例如:CuDNN就会采用适合的精度来调用Tensor Core来进行矩阵运算,这比直接用CUDA core内其它计算单元快N倍。
最底层就不用说了,各种处理器硬件,包括FPGA、ASIC这些定制化加速器。
自从AI处理器兴起,AI编译器也开始迅速发展,其中最主流的是TVM(Tensor virtual machine)和MLIR(Multi-level IR,曾经以为是machine learning IR)
至于这两个IR哪个更好或更合适,优缺点是什么,没有发言权,上面这个链接算是我觉得靠谱的干货,供大家一起学习!
比较同意上文作者观点在于,如果想针对NPU开发编译器,后端IR适配硬件的活基本还是需要深度做的,需要你了解硬件底层细节,或许NPU开发者更合适,当然也必须具备基本的软件修养。朋友告诉我,到了中后期,大量的工作就是写算子,优化算子,这些活做着做着就从高大上变成了苦力活,需要一个一个算子,一个一个网络啃下来。所以对于想入坑的朋友做好心里准备罗,优势是市面上这类夸专用软硬件的人才极少,稀缺,坏处是做NPU的也就那几家,并且很辛苦:)















 294
294

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









