






 本文主要探讨了工业机器人中安川机器人原点丢失的问题,以及FANUC机器人的一些常见故障,如INTP-105和SRVO-006错误,并提供了相应的解决步骤。此外,还提到了ABB机器人的用户权限丢失恢复、KUKA机器人的编程技巧和工作空间监控等工业机器人应用知识。
本文主要探讨了工业机器人中安川机器人原点丢失的问题,以及FANUC机器人的一些常见故障,如INTP-105和SRVO-006错误,并提供了相应的解决步骤。此外,还提到了ABB机器人的用户权限丢失恢复、KUKA机器人的编程技巧和工作空间监控等工业机器人应用知识。
知道多更多资料请关注东莞机器人之家公众号。

揭秘ABB机器人用户权限丢失恢复步骤
揭秘2020工博会上的工业机器人亮点
KUKA机器人用赋值偏移指令一点画圆和方的秘密
KUKA机器人通过 cell.src 来外部调用并启动机器人程序
ABB机器人校原点步骤
解密KUKA 标准函数给用户自定义的对话信息编程(二)
ABB工业机器人应用-多任务
ABB机器人与康耐视视觉通迅程序(二)
ABB示教器校屏和校遥感小秘招。
ABB工业机器人紧凑柜的安全回路
ABB仿真软件安装后发现文件名被改为了中文,那么Win10怎么将中文登录用户文件夹名改为英文名?下面为大家详细介绍一下,快来看吧
ABB机器人仿真打磨小插件揭密Machining PowerPac
FANUC机器人初始化揭秘小妙招!
ABB仿真软件RobotStudio批量创建IO
ABB机器人的控制柜和示教器的认识
松下YC-315TXL焊机带有专机接口,可直接配ABB机器人弧焊包使用。
kuka机器人如何使用库卡机器人内部电磁阀
kuka机器人工作空间监控配置揭秘之(一)
飞哥带你玩转PLC控制小车往返运动程序
ABB机器人RobotStudio软件安装失败原因与解决方法解密
KUKA机器人基础操作应用与编程之篇(一)
安川机器人快捷键自定义设置
盘点下工业机器人相关证书
揭秘ABB机器人用户权限丢失恢复步骤
FANUC机器人常见故障
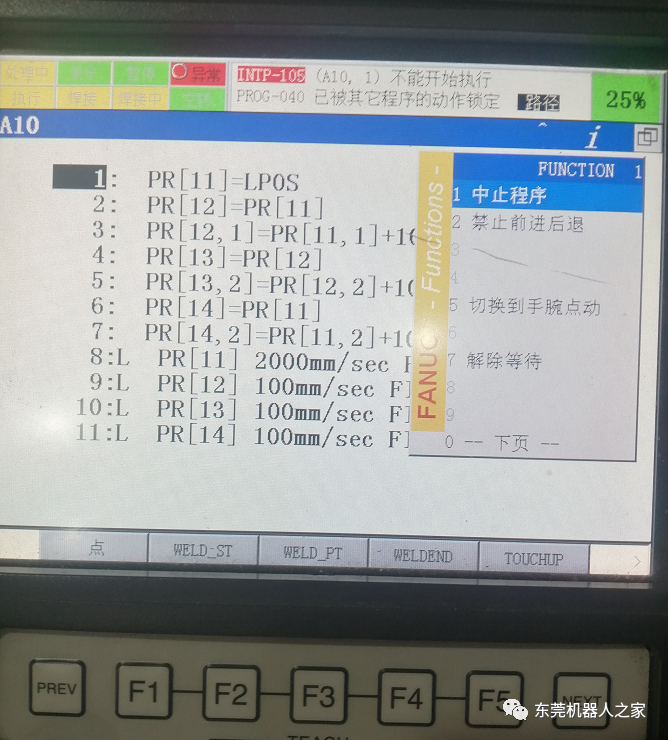
INTP-105(A10,1)不能开始执行
PROG-040已被其它程序的动作锁定。

解决方法如下:FCTN——中止程序——ENTER——即可运行当前的程序。
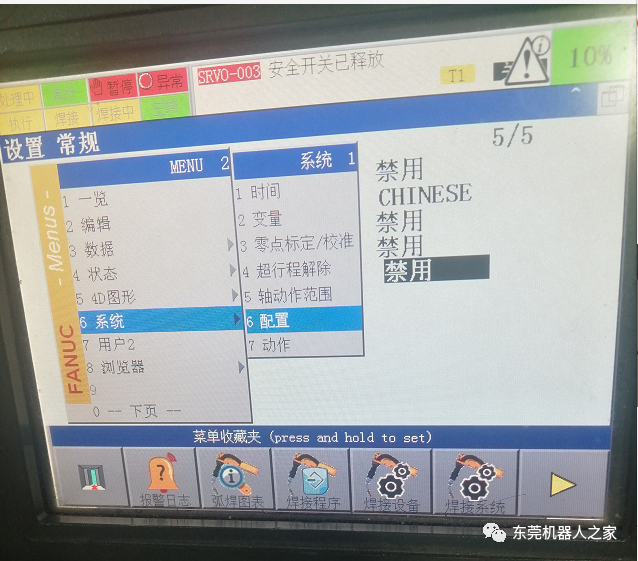
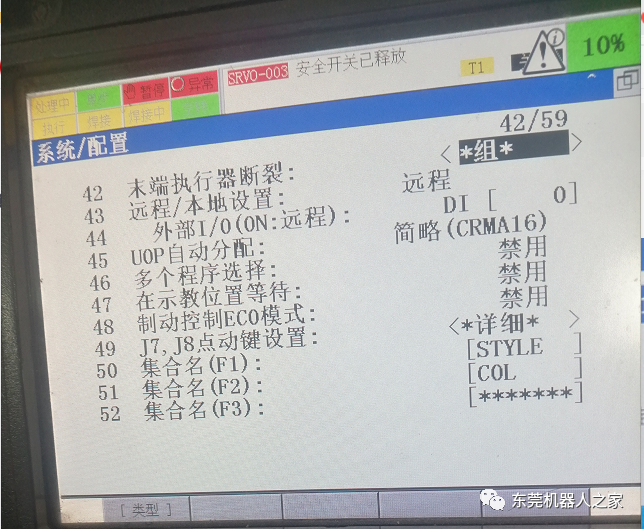
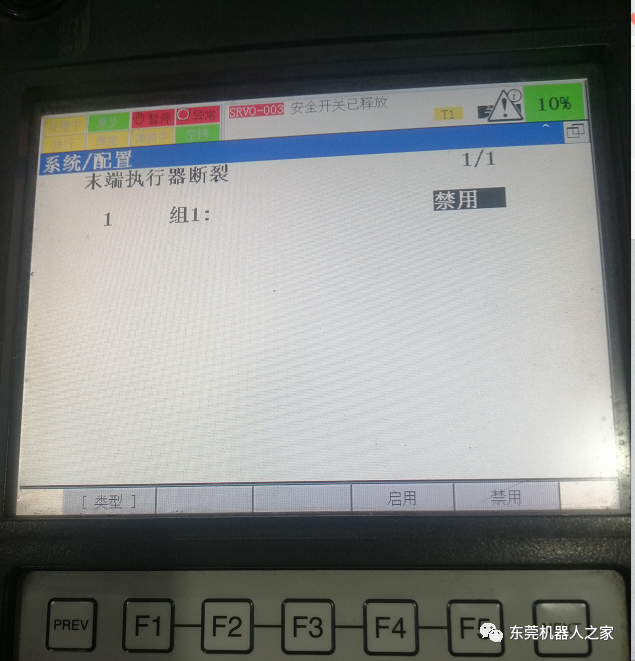
2.SRVO-006 机械手断裂
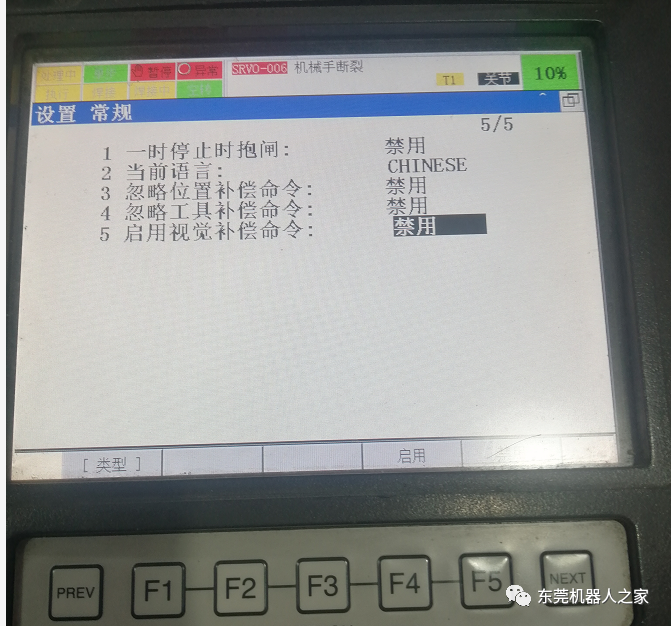
解决方法如下:出现机械手断裂故障——MENU——下页——系统——配置——末端执行器断裂*组——回车——F5改为禁用
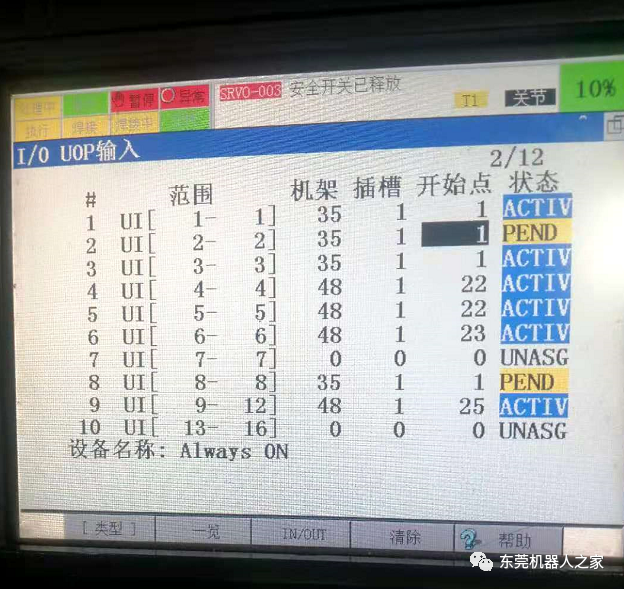
3.暂停故障
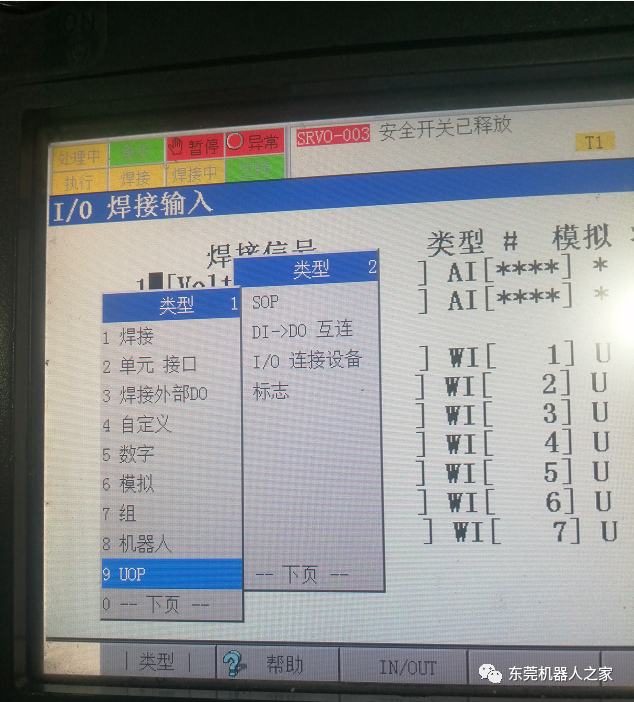
解决方法如下:同时报暂停故障,如果没有接外部暂停信号,可以直接把UI2和UI8分配为常闭(35——1——1)关机重启生效。



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









