






 本文介绍了一例FANUC机器人安装后出现SRV0-214故障的现象及排查过程。通过检查伺服放大器上的保险丝,分析了可能导致故障的原因,包括电源电压不稳定、保险丝质量问题以及外部接口短路等。
本文介绍了一例FANUC机器人安装后出现SRV0-214故障的现象及排查过程。通过检查伺服放大器上的保险丝,分析了可能导致故障的原因,包括电源电压不稳定、保险丝质量问题以及外部接口短路等。
FANUC机器人SRVO故障案例
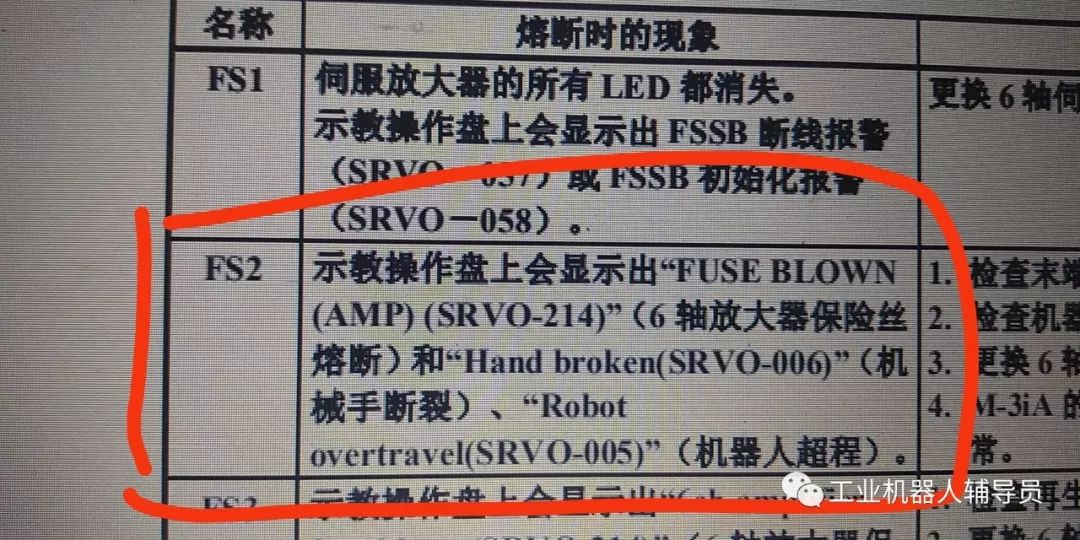
故障现象:新机安装后开机出现SRV0-214
如果对故障代码不熟悉的朋友可以查询FANUC故障代码手册
看下说明,可以快速找到真因
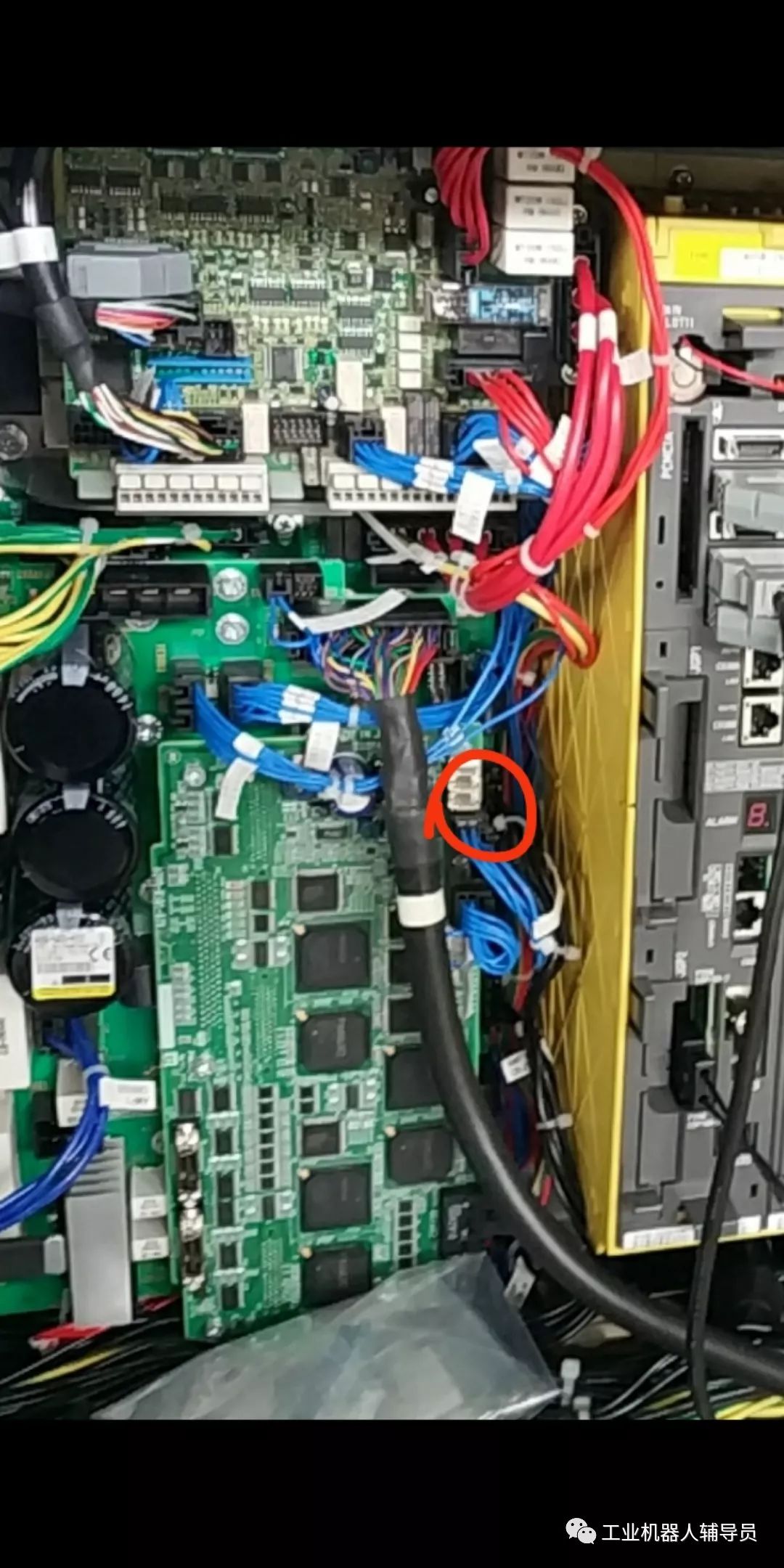
打开控制柜,找到伺服放大器
 找到伺服放大器上排列的保险丝
找到伺服放大器上排列的保险丝
关机情况下可以拆下进行测量通断情况
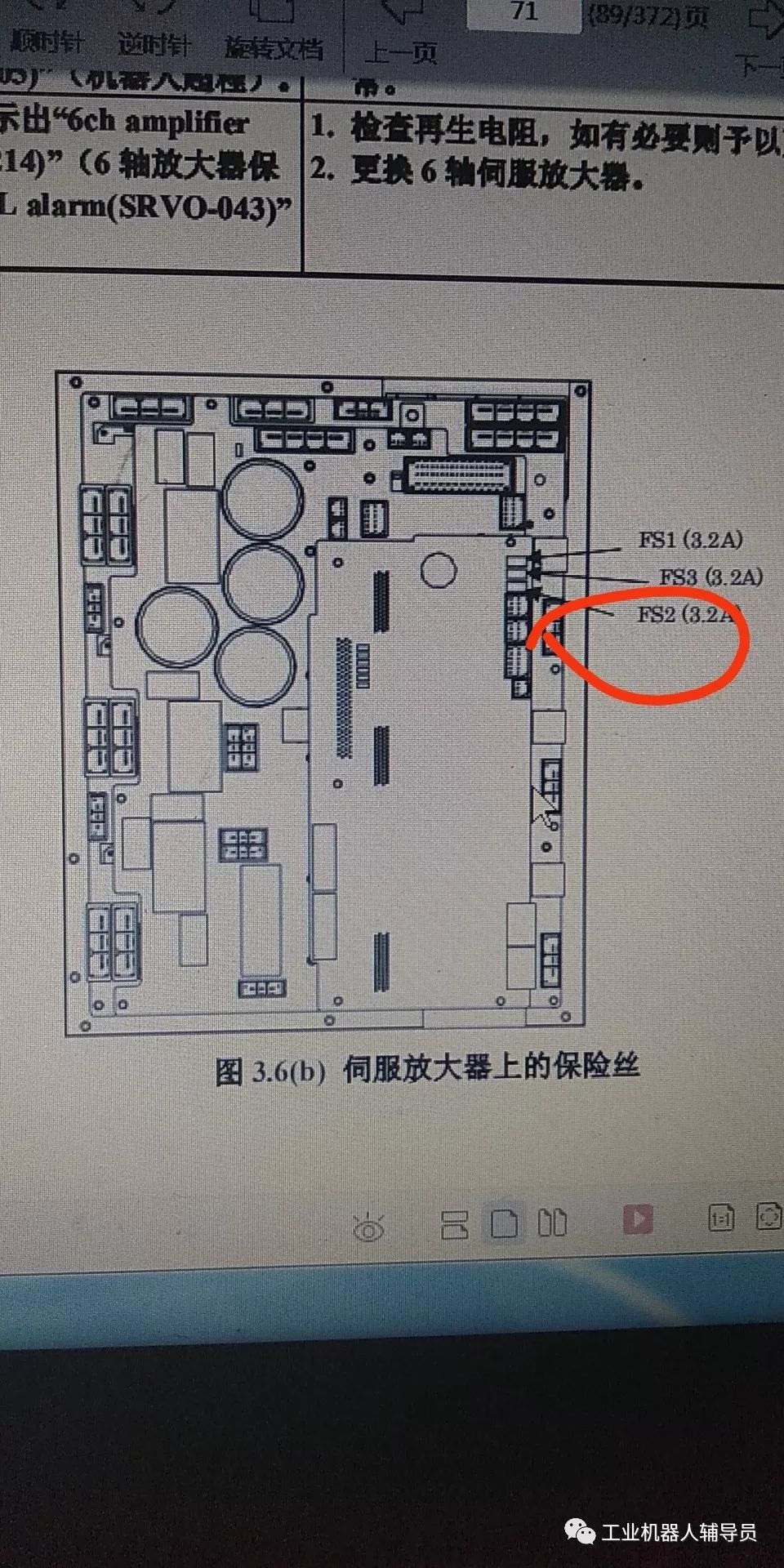
根据对应位置进行拆卸保险丝
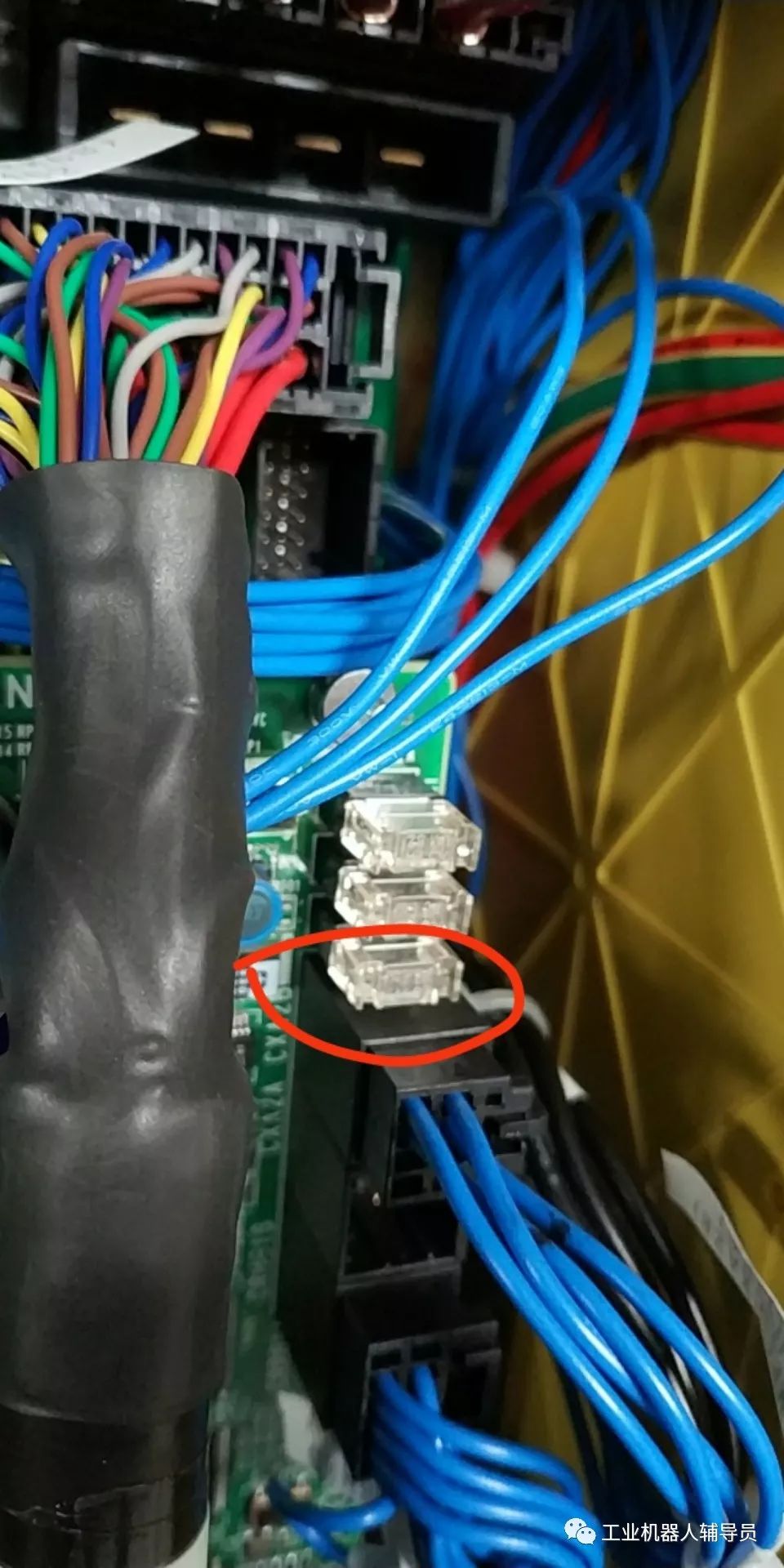
测量其通断情况,更换新的保险丝
导致此故障的原因可能是什么呢?来看一组电气图
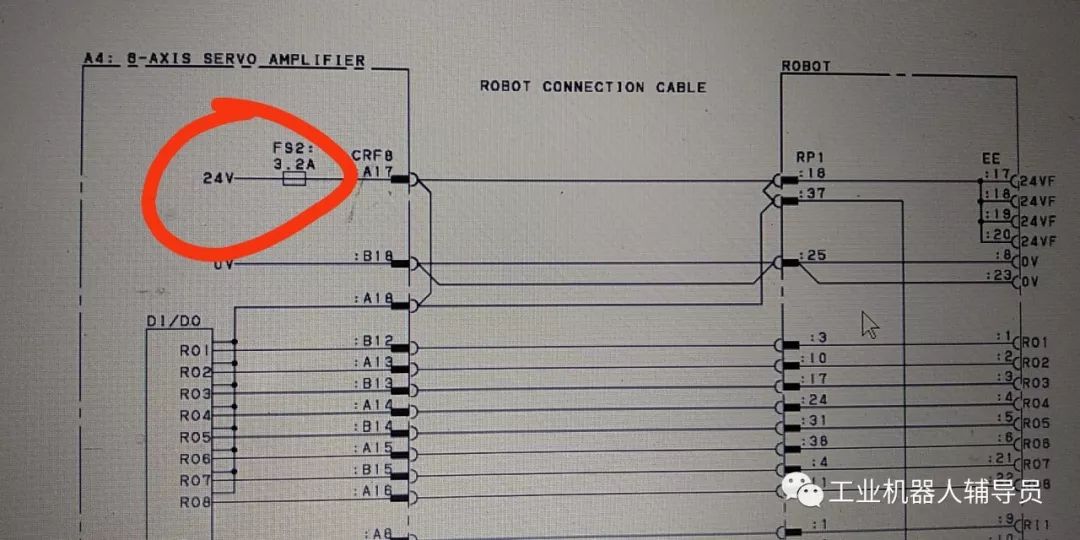
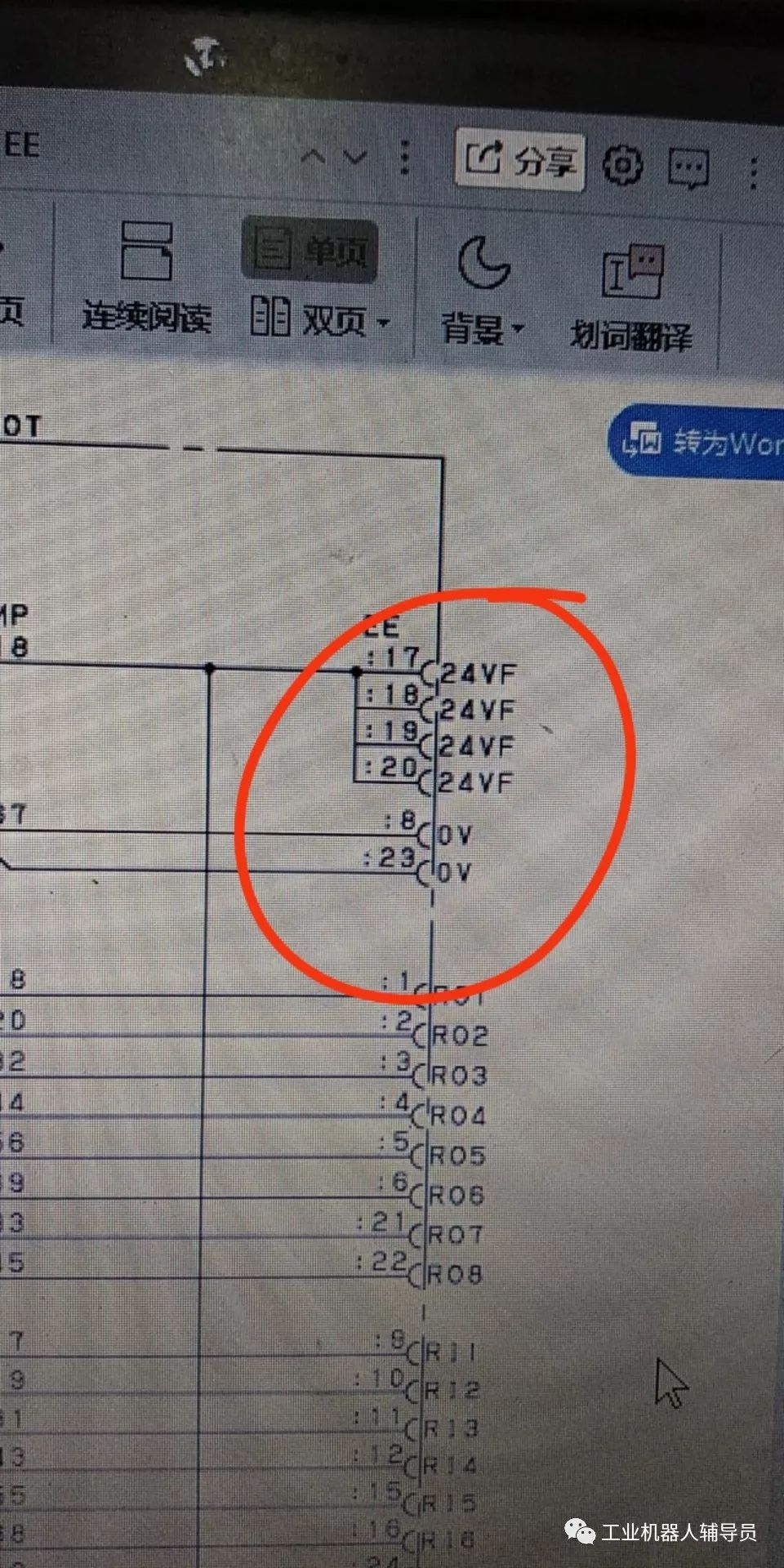
六轴伺服放大器输出电源24V给EE接口,其中FS2起着过过电流保护作用。
原因分析:
1、六轴放大器电源电压输出不稳定导致熔断。
2、保险丝质量差。
3、外部EE接口短路故障导致。
欢迎各位大咖投稿,共同进步!
更多阅读信息
ABB机器人减速机漏油检漏测试
ABB机器人紧凑型控制柜内部结构(图)
KUKA机器人CCU板信号指示灯(从颜色判断状态)
工业机器人伺服电机故障分析
工业机器人电气设计元件选取规则参考
FANUC机器人抓取程序案例
FANUC机器人伺服放大器LED故障诊断(图文)
库卡机器人蓄电池在线检测方法
FANUC机器人主板启动加载过程状态(故障分析)
工业机器人可靠性功能测试与分析
工业机器人撞人事故的真因背后
kuka机器人平衡缸异常噪音消除方法
谐波减速机更换所需工具
如果我是销售,坚决不卖给这样的客户!
库卡机器人 CCU板卡接口功能与保险丝作用(图文)
UR机器人如何释放抱闸的
ABB机器人紧凑型控制柜内部结构(图)
FANUC机器人零点快速校准流程
感谢关注,有问题请留言


















 8915
8915

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









