






 本文介绍了一篇CVPR2019的论文,该研究针对PointNet提出多种对抗点云生成算法,包括点扰动与生成。研究通过引入有意义形状的点簇等方式,对现有3D深度模型的安全性进行了挑战,并定义了相应的扰动评估标准。
本文介绍了一篇CVPR2019的论文,该研究针对PointNet提出多种对抗点云生成算法,包括点扰动与生成。研究通过引入有意义形状的点簇等方式,对现有3D深度模型的安全性进行了挑战,并定义了相应的扰动评估标准。
目前做的方向是点云分类,CVPR 2019中了的这篇论文算是颠覆了当前以PointNet为基础的使用深度学习方法进行的点云分类研究,特此关注下这篇文章。
论文链接:https://arxiv.org/abs/1809.07016
摘要:
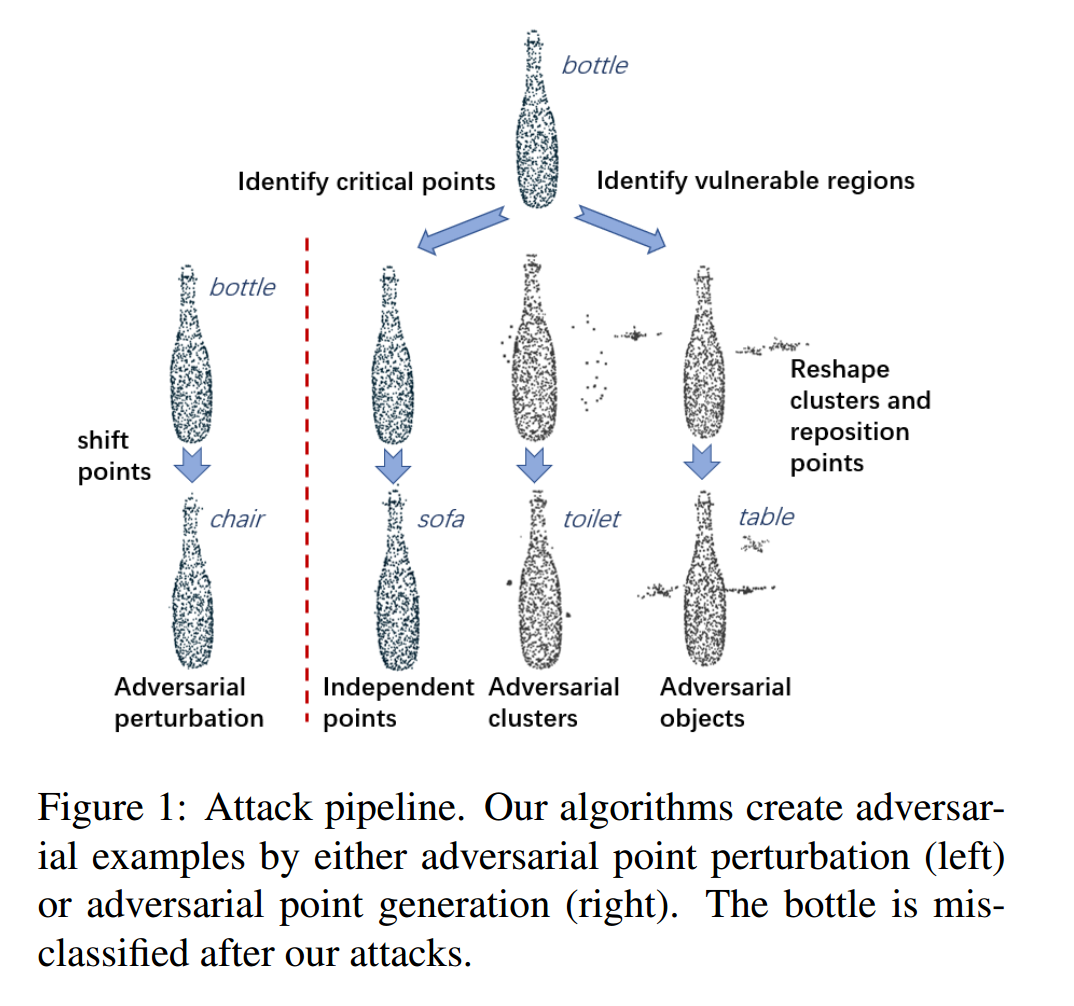
已知深度神经网络容易受到精心设计的对抗性的例子的影响,导致模型做出错误的预测。虽然已经广泛研究了2D图像和CNN的对抗性示例,但是对诸如点云的3D数据的关注较少。鉴于许多安全关键的3D应用程序(如自动驾驶),研究对抗点云如何影响当前的深3D模型非常重要。在这项工作中,我们提出了几种新的算法来针对PointNet制作对抗点云,PointNet是一种广泛使用的用于点云处理的深度神经网络。我们的算法以两种方式工作:对抗点扰动和对抗点生成。对于点扰动,我们可微小地改变现有点。对于点生成,我们生成一组独立的和分散的点或少量(1-3)具有有意义形状的点簇,例如可以隐藏在肉眼认为中的球和飞机点云模型中。此外,我们制定了针对点云攻击的六种扰动测量指标,并进行了大量实验来评估所提出的算法。
目前还没开源代码,等待开源……
对于点云分类来说,这是之前没有见到过的研究方向,未来的点云分类方法的验证或许需要进行此类的算法可行性验证。
很开心看到点云方向的逐渐繁荣。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









