







简介:本项目介绍了一款基于STM32F407微控制器的智能家居网关程序设计。该程序作为智能家庭网络的中心,实现了与各种智能设备的通信协调。STM32F407微控制器具备高性能和低功耗的ARM Cortex-M4内核,并拥有浮点单元,适合复杂算法的应用。程序集成了ENC28J60以太网控制器,使得设备可以通过SPI接口连接TCP/IP网络。智能家居系统还依赖于名为“未来之家”的开源测试平台实现远程控制,提供API和SDK供开发者使用,以实现设备的场景联动与控制。此外,系统支持UDP通信协议,适合实时性要求高的通信需求。项目涵盖嵌入式系统开发、C/C++编程、TCP/IP协议栈、STM32系列MCU和ENC28J60模块等技术要点。 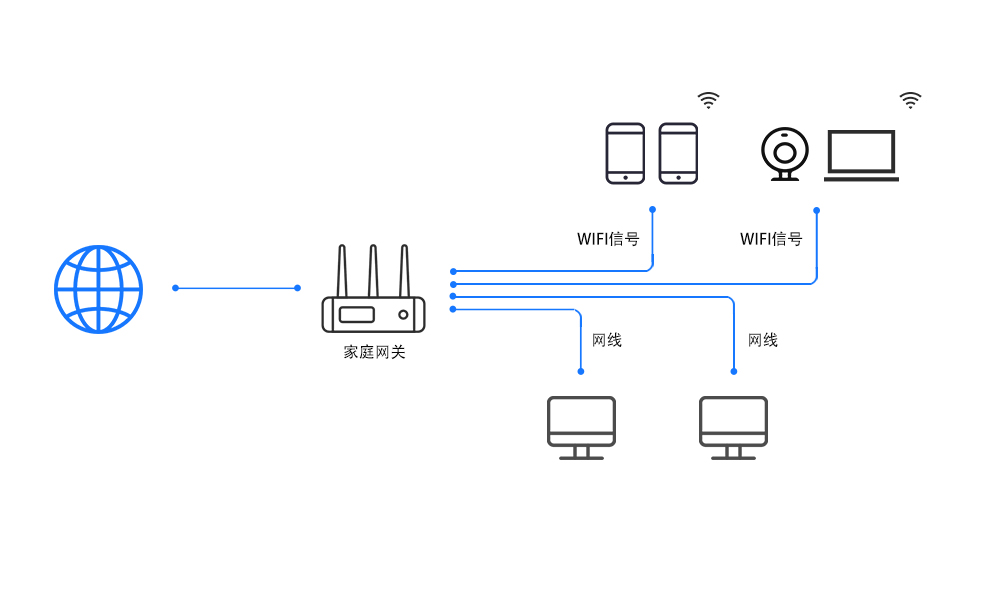
1. 智能家居网关程序概念
智能家居系统的核心之一是网关程序,它作为智能家居设备与外部网络之间的桥梁,实现了数据的收集、处理和转发。本章将从基础概念出发,深入探讨智能家居网关的功能与实现要点。
智能家居网关的角色与功能
智能家居网关是智能家居生态系统中的关键组件,它不仅负责设备间的通讯,还确保了不同协议与标准之间的兼容性。其主要功能包括:
- 设备连接管理:网关必须能够管理和维护与各智能设备的连接。
- 数据处理与转发:网关对收集的数据进行处理,并按照需求转发到相应的服务或用户界面。
- 用户接口:提供用户交互的界面,如智能手机应用或网页。
- 系统安全:确保数据传输的安全性,防止未授权访问。
网关程序的技术挑战
在实现智能家居网关程序时,开发者需要面对一系列技术挑战:
- 异构协议兼容性 :不同设备可能使用不同的通信协议(如Zigbee, Wi-Fi, Bluetooth等),网关需要实现这些协议的转换。
- 实时性能 :网关必须保证数据实时处理和转发,以支持如语音控制或实时监控等场景。
- 安全性问题 :网关作为家庭网络安全的首道防线,需要有足够的安全机制,防止潜在的网络攻击和数据泄露。
通过理解这些基础概念和挑战,开发者能够更好地规划和构建智能家居网关程序,使其满足日益增长的智能家居系统的复杂需求。
2. STM32F407微控制器应用
2.1 STM32F407微控制器简介
2.1.1 微控制器的型号与性能参数
STM32F407微控制器是STMicroelectronics(意法半导体)推出的一款高性能ARM Cortex-M4微控制器。它拥有最高168MHz的主频,内置高达1MB的闪存和256KB的RAM,同时支持外接存储器。其丰富的外设接口,如USB OTG、CAN、10/100以太网等,使其成为嵌入式系统和物联网领域的理想选择。
这款微控制器支持浮点运算单元(FPU)和数字信号处理(DSP)指令集,非常适用于需要大量数学计算的应用,如信号处理和图像处理。此外,STM32F407的性能参数还包括多种低功耗模式、一个高性能的ADC和DAC,以及丰富的通信接口,这些都大大增强了设备在实际应用中的灵活性和效率。
2.1.2 微控制器的硬件架构概述
从硬件架构来看,STM32F407基于ARM Cortex-M4核心构建,该核心采用32位哈佛架构,具有分离的数据和指令总线,支持Thumb-2指令集,实现了对16位和32位指令的高效执行。核心内部集成了乘法累加器(MAC),以加速乘法和累加运算,对数字信号处理尤为重要。
硬件上,STM32F407提供了丰富的外设,包括多个串行通信接口、定时器、模拟数字转换器(ADC)、数字模拟转换器(DAC)、CRC计算单元等,这些硬件资源可通过寄存器配置实现各种功能。此外,微控制器还配备了内存保护单元(MPU),以提高系统的安全性和稳定性。
为了更好地理解和应用STM32F407,开发者需要熟悉其硬件架构,包括处理器核、内存映射、时钟系统、电源管理等关键模块。硬件架构的深入理解有助于在编程时做出更优的设计决策,以充分利用微控制器的潜力。
2.2 STM32F407的开发环境配置
2.2.1 开发板的选择与购买指南
在开始STM32F407微控制器的开发之前,选择合适的开发板是重要的一步。市场上有多种基于STM32F407的开发板,比如ST的官方开发板“NUCLEO-F407RG”或“Discovery kit STM32F407VG”,它们都提供了丰富的接口和便利的扩展模块。
购买指南: 1. 性能需求 :确认开发项目的需求,比如所需的外设、内存大小等。 2. 扩展性 :检查开发板是否有足够的扩展接口,例如Arduino兼容头、ST Morpho接口等。 3. 文档支持 :选择文档齐全、社区活跃的开发板,以便于解决开发过程中遇到的问题。 4. 成本考虑 :在满足项目需求的前提下,考虑开发板的成本效益。 5. 品牌信任度 :优先选择知名品牌或经过验证的开发板,以保证质量和售后支持。
购买开发板后,可以通过开发板附带的快速入门指南了解基本配置和使用方法。
2.2.2 软件开发工具链的搭建与使用
软件开发工具链包括编译器、调试器和集成开发环境(IDE)。对于STM32F407微控制器,最常用的开发工具链包括: - 编译器 :例如GNU ARM Embedded Toolchain或ARM Keil MDK。 - 调试器 :ST提供的ST-LINK/V2或第三方支持的J-Link。 - IDE :如Keil MDK、IAR EWARM、Eclipse-based IDE(如STM32CubeIDE)或Atollic TrueSTUDIO。
搭建软件开发工具链的步骤大致如下: 1. 下载安装 :根据需要下载相应的IDE和编译器工具,并根据安装向导进行安装。 2. 配置编译环境 :在IDE中配置编译器路径和库文件路径,以及创建项目。 3. 配置调试器 :连接调试器到开发板,并在IDE中设置调试参数。 4. 编写代码 :编写或导入源代码,编写适用于STM32F407微控制器的代码。 5. 编译构建 :构建项目并生成二进制文件。 6. 下载调试 :将编译好的程序通过调试器下载到开发板上,进行调试和测试。
利用软件开发工具链,开发者可以进行代码编写、编译、下载、调试等开发流程,这些步骤环环相扣,构成了完整的开发周期。
2.3 STM32F407编程实战
2.3.1 利用HAL库进行简单IO控制
STM32F407微控制器的硬件抽象层(HAL)库是ST提供的一套面向硬件寄存器操作的软件抽象层。利用HAL库,开发者可以更简洁、高效地控制微控制器的硬件资源。
一个简单的IO控制实战示例是使用HAL库来控制一个LED的闪烁。以下是基于STM32F407的代码片段:
#include "stm32f4xx_hal.h"
// 初始化HAL库及系统时钟
void HAL_MspInit(void) {
// 配置系统时钟等初始化代码
}
int main(void) {
// 初始化HAL库
HAL_Init();
// 配置系统时钟
SystemClock_Config();
// 配置GPIO
GPIO_InitTypeDef GPIO_InitStruct = {0};
__HAL_RCC_GPIOC_CLK_ENABLE();
GPIO_InitStruct.Pin = GPIO_PIN_13;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOC, &GPIO_InitStruct);
// 主循环
while (1) {
HAL_GPIO_TogglePin(GPIOC, GPIO_PIN_13); // 切换LED状态
HAL_Delay(500); // 延时500ms
}
}
在此代码中,我们首先初始化了HAL库,然后配置了系统时钟和GPIO。在主循环中,我们使用 HAL_GPIO_TogglePin() 函数来切换LED的状态,并使用 HAL_Delay() 函数来实现延时,使得LED以一定频率闪烁。
2.3.2 利用LL库优化性能的实践技巧
虽然HAL库提供了便捷的开发体验,但在对性能有严格要求的应用中,直接使用低级(Low Layer,LL)库可能更为合适。LL库直接操作寄存器,为开发者提供了更高的性能和更大的灵活性。
以下是一个使用LL库进行GPIO控制的实例:
#include "stm32f4xx_ll_bus.h"
#include "stm32f4xx_ll_gpio.h"
#include "stm32f4xx_ll_rcc.h"
void LED_Init(void) {
// 启用GPIOC时钟
LL_AHB1_GRP1_EnableClock(LL_AHB1_GRP1_PERIPH_GPIOC);
LL_GPIO_SetPinMode(GPIOC, LL_GPIO_PIN_13, LL_GPIO_MODE_OUTPUT);
LL_GPIO_SetPinOutputType(GPIOC, LL_GPIO_PIN_13, LL_GPIO_OUTPUT_PUSHPULL);
LL_GPIO_SetPinSpeed(GPIOC, LL_GPIO_PIN_13, LL_GPIO_SPEED_FREQ_LOW);
LL_GPIO_SetPinPull(GPIOC, LL_GPIO_PIN_13, LL_GPIO_PULL_NO);
}
int main(void) {
LED_Init();
while (1) {
LL_GPIO_TogglePin(GPIOC, LL_GPIO_PIN_13); // 切换LED状态
LL_mDelay(500); // 使用LL库的延时函数
}
}
在这个实例中,我们通过LL库的函数直接操作GPIO寄存器,实现LED的闪烁。 LL_mDelay() 函数直接使用硬件计数器来实现更精确的延时。在需要进行高性能操作的应用中,利用LL库进行底层优化是一个非常实用的技巧。
总的来说,无论是使用HAL库还是LL库,都要求开发者具备对STM32F407硬件资源的深入理解和合理的性能优化能力,这对于开发高效、稳定的嵌入式系统至关重要。
3. ARM Cortex-M4内核特性
ARM Cortex-M4内核是广泛应用于嵌入式系统的高性能处理器之一。Cortex-M4拥有许多先进的特性,例如单周期乘法、硬件除法、单指令多数据(SIMD)处理、以及浮点运算单元(FPU)。这些特性使得Cortex-M4特别适合于需要高度实时处理能力和高效率数字信号处理(DSP)功能的应用程序。
3.1 ARM Cortex-M4内核基础
3.1.1 内核架构与工作原理
Cortex-M4内核采用的是哈佛架构,这意味着其指令集和数据存储是分开的。这种设计允许处理器同时从指令存储器和数据存储器中提取数据。Cortex-M4支持3级流水线,具有分支预测功能,并提供异常处理能力。
Cortex-M4还整合了一个数字信号处理(DSP)扩展集,它包含了一系列优化的DSP指令,比如乘累加(MAC)操作,这些对于处理音频信号、图像和控制算法非常有用。此外,内核还拥有单精度浮点单元(FPU),使得在实时系统中进行浮点运算成为可能。
3.1.2 Cortex-M4的特点与优势
Cortex-M4的主要优势在于它的高性能和低功耗。Cortex-M4通常工作于高达120MHz的频率,可以执行超过1.2DMIPS/MHz的指令。内核集成了硬件除法和单周期乘法指令,大幅提高了运算效率。FPU的存在使得复杂的浮点运算得以在非常短的时间内完成,这对于需要精确控制的应用至关重要。
此外,Cortex-M4提供了各种省电模式和灵活的时钟管理方案,有助于延长电池寿命。异常处理机制使得Cortex-M4在遇到中断时能够快速响应,保证了系统的实时性。
3.2 Cortex-M4的指令集与编程
3.2.1 常用指令集介绍
Cortex-M4拥有一个相对简单的指令集,它支持基本的算数逻辑运算,比如加减乘除、逻辑位操作等。特别的是,Cortex-M4还拥有针对DSP优化的指令,如饱和算数操作、位反转、以及循环寻址模式等。
例如,Cortex-M4的DSP指令集包括QADD和QSUB指令,它们是带饱和的加法和减法操作,这在处理音频或视频信号时非常有用,因为它们可以防止数据溢出。还有一个非常重要的指令是SSAT,它用于对结果进行饱和操作,确保数据不会超出设定范围。
3.2.2 指令集在STM32F407中的应用案例
在STM32F407微控制器中使用Cortex-M4指令集进行编程时,开发者可以直接通过汇编语言编写特定的DSP指令,或者使用支持内联汇编的高级语言如C或C++。以下是一个使用Cortex-M4指令集进行数据处理的简单例子:
; 假设R0寄存器中有两个整数,我们要计算它们的饱和乘法结果
MULS R0, R1 ; 将R0和R1寄存器的值进行带符号乘法,结果存储在R0中
SSAT R0, #8 ; 对结果进行8位饱和处理,如果超出8位范围则饱和到最大或最小值
在C语言中,这样的操作可能会以内联汇编的方式出现:
int a = 128, b = -32, result;
__asm("MULS %0, %1\n\t" // R0 = a * b
"SSAT %0, #8\n\t" // R0 = saturate(R0, 8bit)
: "=r" (result) // 输出
: "r" (a), "r" (b) // 输入
: "r0"); // 影响的寄存器
通过这种方式,开发者能够充分利用Cortex-M4的DSP指令集,从而提高程序性能。
3.3 Cortex-M4的性能优化
3.3.1 性能优化的基本原则
在为基于Cortex-M4微控制器开发软件时,性能优化是至关重要的。优化的第一步是了解程序的瓶颈在哪里,然后针对这些瓶颈进行调整。
性能优化的基本原则包括:
- 优化算法:选择时间复杂度和空间复杂度都比较低的算法。
- 减少分支:优化代码逻辑以避免过多的分支指令,因为分支指令会导致流水线的重启。
- 循环展开:减少循环的迭代次数和循环开销,尤其是在循环体内执行简单操作时。
- 指令流水线优化:通过合理安排指令执行顺序,减少流水线延迟。
- 使用DSP指令:利用内核提供的DSP扩展指令集来提高特定算法的执行速度。
3.3.2 优化案例分析与实践
考虑一个简单的例子:数字滤波器的实现。在实时音频处理中,滤波器性能至关重要。以下是使用C语言实现的一阶低通滤波器函数:
float filter(float input, float prev_output, float alpha) {
return (input * alpha) + (prev_output * (1 - alpha));
}
如果我们考虑到浮点乘法的性能瓶颈,并且滤波器运行频率较高,我们可以使用Cortex-M4的DSP指令来优化这个函数。例如,我们可以使用乘累加(MLA)指令,该指令可以在单个周期内完成乘法和累加操作。下面的代码展示了如何通过汇编语言和内联汇编优化这个函数:
float filter_optimized(float input, float prev_output, float alpha) {
float result;
__asm("FLD %1, s0\n\t" // 加载input到浮点寄存器s0
"FLD %2, s1\n\t" // 加载prev_output到浮点寄存器s1
"FLD %3, s2\n\t" // 加载alpha到浮点寄存器s2
"MLA s3, s0, s2, s1\n\t" // s3 = s0 * s2 + s1
"FSTP %0, s3\n\t" // 将s3存储到result并弹出
: "=m"(result) // 输出结果
: "m"(input), "m"(prev_output), "m"(alpha) // 输入参数
: "s0", "s1", "s2", "s3" // 使用的浮点寄存器
);
return result;
}
通过这种方式,我们的滤波器函数能够在每个周期完成运算,而不需要进行额外的乘法指令,这使得函数的执行更加高效。
通过对Cortex-M4内核及其指令集深入理解,开发者可以更好地优化程序性能,充分发挥出STM32F407微控制器的潜力。这种性能优化在资源受限的嵌入式系统中尤为重要,能够提升系统的实时响应能力和数据处理能力。
4. 内存配置与外设接口
4.1 STM32F407的内存管理
4.1.1 内存架构与存储技术
STM32F407微控制器作为高性能ARM Cortex-M4系列的代表,其内存架构采用高速内嵌SRAM和外部存储接口以实现灵活的存储解决方案。SRAM提供了快速的读写能力,适用于存储需要频繁访问的数据,而外部存储接口则扩展了存储能力,允许连接到例如SD卡、NOR Flash等外部存储设备。
SRAM (静态随机存取存储器) 的速度非常快,对数据的读写几乎可以在一个时钟周期内完成。STM32F407通常拥有高达192KB的SRAM,可以被编程为单一的内存块,或者根据需要进行分块管理。
外部存储接口支持多种总线宽度,例如8位、16位和32位,兼容各种存储器设备。通过FSMC(灵活的静态存储控制器)来控制外部存储器,实现高效的内存访问。
4.1.2 内存管理单元(MMU)的应用
MMU(内存管理单元) 是一个硬件模块,它负责处理CPU的内存访问请求,将虚拟地址转换为物理地址。在嵌入式系统中,MMU的使用并不多见,因为它们通常没有操作系统,或者运行的是实时操作系统。然而,对于使用了MMU的复杂系统,它可以帮助实现虚拟内存管理,支持内存保护和访问权限控制。
在STM32F407中,MMU的使用并不常见,因为它的应用环境往往不需要操作系统或运行的是裸机程序。但是了解MMU的概念对于设计更复杂的应用,例如结合RTOS(实时操作系统)时,是非常有用的。
4.2 外设接口技术详解
4.2.1 外设接口的分类与功能
STM32F407微控制器提供了丰富的外设接口,包括但不限于I2C、SPI、USART等,以及专用于存储的接口如FSMC和SDIO。这些接口允许连接各种外设,如传感器、显示器、网络控制器等,扩展微控制器的功能。
- I2C接口 适用于慢速设备间的通信,如温度传感器、EEPROM等。
- SPI接口 适合高速数据传输,如与外部存储器通信。
- USART接口 提供异步串行通信能力,用于UART、RS-232等。
每个接口都有其特定的配置寄存器和数据传输机制,了解这些细节对于正确使用外设接口至关重要。
4.2.2 常见外设接口编程实践
以下是一个简单的I2C接口编程实践,用于与I2C温度传感器通信:
#include "stm32f4xx_hal.h"
I2C_HandleTypeDef hi2c1; // 声明I2C句柄
// 初始化I2C接口
void MX_I2C1_Init(void)
{
hi2c1.Instance = I2C1;
hi2c1.Init.ClockSpeed = 100000;
hi2c1.Init.DutyCycle = I2C_DUTYCYCLE_2;
hi2c1.Init.OwnAddress1 = 0;
hi2c1.Init.AddressingMode = I2C_ADDRESSINGMODE_7BIT;
hi2c1.Init.DualAddressMode = I2C_DUALADDRESS_DISABLE;
hi2c1.Init.OwnAddress2 = 0;
hi2c1.Init.GeneralCallMode = I2C_GENERALCALL_DISABLE;
hi2c1.Init.NoStretchMode = I2C_NOSTRETCH_DISABLE;
HAL_I2C_Init(&hi2c1);
}
// 读取温度值
uint8_t Read_Temperature(I2C_HandleTypeDef *hi2c)
{
uint8_t temp = 0;
HAL_StatusTypeDef status;
uint8_t slave_address = 0x90; // 温度传感器的从设备地址
uint8_t temperature_addr = 0x00; // 温度寄存器地址
uint8_t temp_buf[2];
status = HAL_I2C_Mem_Read(hi2c, slave_address, temperature_addr, I2C_MEMADD_SIZE_8BIT, temp_buf, 2, 1000);
if (status == HAL_OK)
{
temp = (temp_buf[0] << 8) + temp_buf[1];
}
return temp;
}
在上面的代码中,我们首先初始化了I2C接口,然后定义了一个函数 Read_Temperature 用于从温度传感器读取温度值。 HAL_I2C_Mem_Read 是HAL库提供的一个函数,用于通过I2C读取外部设备的内存数据。通过参数我们指定了从设备地址、寄存器地址和数据长度。
4.3 内存与外设接口的交互
4.3.1 内存与外设的高效交互策略
高效的内存与外设接口的交互策略是确保嵌入式系统性能的关键。在STM32F407中,这种交互通常通过DMA(直接内存访问)来实现。DMA允许外设直接访问内存,而无需CPU干预,从而减少CPU负担并提高数据传输效率。
一个典型的使用案例是通过SPI接口读写外部存储器。使用DMA,数据可以被直接传送到指定的内存区域,而不需要CPU逐字节地进行数据传输。这种方法特别适用于处理大量数据或者需要高吞吐量的场景。
4.3.2 实际项目中的应用与调试
在实际项目中,内存与外设接口的交互需要经过仔细的设计和调试。以下是一个实际项目中,如何利用DMA与SPI外设进行数据交互的案例:
// 初始化DMA以进行SPI数据传输
void MX_DMA_Init(void)
{
// DMA通道配置
__HAL_RCC_DMA2_CLK_ENABLE();
DMA_HandleTypeDef hdma_spi1_rx;
hdma_spi1_rx.Instance = DMA2_Stream0;
hdma_spi1_rx.Init.Channel = DMA_CHANNEL_3;
hdma_spi1_rx.Init.Direction = DMA_PERIPH_TO_MEMORY;
hdma_spi1_rx.Init.PeriphInc = DMA_PINC_DISABLE;
hdma_spi1_rx.Init.MemInc = DMA_MINC_ENABLE;
hdma_spi1_rx.Init.PeriphDataAlignment = DMA_PDATAALIGN_BYTE;
hdma_spi1_rx.Init.MemDataAlignment = DMA_MDATAALIGN_BYTE;
hdma_spi1_rx.Init.Mode = DMA_NORMAL;
hdma_spi1_rx.Init.Priority = DMA_PRIORITY_LOW;
hdma_spi1_rx.Init.FIFOMode = DMA_FIFOMODE_DISABLE;
HAL_DMA_Init(&hdma_spi1_rx);
// 将DMA与SPI外设关联
__HAL_LINKDMA(&hi2c1, hdmarx, hdma_spi1_rx);
}
// SPI接收数据
void SPI_ReceiveData(SPI_HandleTypeDef *hspi, uint8_t *buffer, uint32_t size)
{
HAL_SPI_Receive_DMA(hspi, buffer, size);
}
// 接收完成回调函数
void HAL_SPI_RxCpltCallback(SPI_HandleTypeDef *hspi)
{
// 数据处理逻辑
}
在上述代码中,我们首先配置了DMA通道,使其与SPI1的接收端口关联。然后在 SPI_ReceiveData 函数中,使用 HAL_SPI_Receive_DMA 来启动非阻塞的数据接收操作。当数据传输完成后, HAL_SPI_RxCpltCallback 回调函数会被触发,可以在这里处理接收到的数据。
在调试过程中,确保DMA通道正确配置并且与SPI外设关联是关键。另外,检查DMA请求是否被正确触发,以及是否有中断服务例程正确响应。在系统运行时,观察内存使用情况和数据传输速率来评估效率和性能表现。
5. ENC28J60以太网控制器
5.1 ENC28J60控制器概述
5.1.1 控制器的技术规格与特性
ENC28J60是一款由Microchip Technology生产的独立以太网控制器,它带有SPI接口,专为嵌入式应用设计。 ENC28J60提供完整的IEEE 802.3兼容以太网MAC层、10Base-T物理层,以及4KB的双端口缓冲区。具有高性能,低功耗的特点。控制器支持全双工模式,并且可以处理所有MAC层和物理层功能。
ENC28J60的一些关键特性包括:
- 支持10Mbps以太网传输速率。
- 内置PHY接口,无需外部网络物理层器件。
- 4KB的双端口RAM作为发送和接收缓冲区。
- 内置MAC层统计计数器。
- 支持ARP、IP、TCP、ICMP协议,可以处理IP碎片以及校验和生成。
- 兼容SPI接口,最高可达20MHz的时钟速度。
5.1.2 ENC28J60在智能家居中的应用场景
ENC28J60由于其低成本、低功耗、小型封装和易于使用的特点,非常适合用在智能家居系统中。智能家居网关通常需要连接到家庭内部的局域网,并通过互联网与外部通信。使用ENC28J60,网关设备能够提供一个稳定可靠的以太网连接。这使得控制和监控家庭自动化系统变得更加简单。
在智能家居环境中, ENC28J60可以用来:
- 提供智能家居设备与本地或远程服务器之间的稳定网络连接。
- 实现设备间的相互通信,确保数据的实时传输。
- 支持智能家庭的安全系统,包括视频监控和环境传感网络。
- 支持固件更新和远程管理智能家居设备。
- 提高家庭网络的扩展性,通过以太网连接更多的智能设备。
5.2 ENC28J60的硬件连接与配置
5.2.1 硬件接口的连接方式
ENC28J60与主控制器(如STM32F407)的连接主要依赖于SPI接口。SPI接口是一个常用的串行通信协议,它使用四条线进行通信:MISO(主设备输入,从设备输出)、MOSI(主设备输出,从设备输入)、SCK(时钟信号)和CS(片选信号)。连接方式如下:
- CS连接到STM32F407的任意一个GPIO引脚,用以选择ENC28J60。
- SCK连接到STM32F407的SPI时钟线。
- MOSI和MISO分别连接到STM32F407的SPI发送和接收线。
- GND连接到地线。
- VCC连接到3.3V电源。
5.2.2 SPI通信协议与ENC28J60的配置
ENC28J60的配置需要通过SPI协议向其内部寄存器写入命令和数据来完成。以下是一个ENC28J60初始化配置的示例步骤:
- 通过SPI发送命令,复位ENC28J60。
- 设置ENC28J60的系统时钟。
- 配置PHY寄存器,选择工作模式。
- 初始化MAC地址寄存器。
- 配置以太网控制寄存器,允许接收和发送数据包。
- 设置接收缓冲区的起始地址。
- 使能中断(如有需要)。
示例代码:
// SPI发送函数示例
void SPI_Send(uint8_t address, uint8_t data) {
// 启动片选信号
CS_LOW();
// 发送写命令和地址
SPI_Transfer(WRITE_CONTROL_REGISTER | address);
// 发送数据
SPI_Transfer(data);
// 停止片选信号
CS_HIGH();
}
// ENC28J60初始化函数示例
void ENC28J60_Init() {
// 硬件复位ENC28J60
ENC28J60_Reset();
// 设置系统时钟
SPI_Send(ERXFCON, 0b01111010); // RXFCON设置
// 配置PHY
SPI_Send(PHCON1, 0b00100000); // 设置全双工模式
// 配置MAC地址等
// ...
// 开启接收功能
SPI_Send(ECON1, ECON1_RXEN);
}
通过上述步骤,ENC28J60即可完成初始化,并开始以太网通信的准备。
5.3 ENC28J60的软件驱动开发
5.3.1 基于SPI的ENC28J60驱动实现
ENC28J60的软件驱动开发需要考虑如何通过SPI接口发送和接收数据,以及如何处理网络数据包。以下是一个基于STM32F407的ENC28J60驱动实现的示例:
- 驱动初始化: 配置GPIO,初始化SPI接口,然后调用初始化函数ENC28J60_Init。
- 数据发送: 封装数据包,通过SPI发送到ENC28J60的发送缓冲区。
- 数据接收: 轮询或中断方式,从ENC28J60的接收缓冲区读取数据包。
示例代码:
// 数据发送函数示例
void ENC28J60_SendPacket(uint8_t *packet, uint16_t size) {
// 写入包指针,指向TXSTART
SPI_Send(ERDPTL, TXSTART & 0xFF);
SPI_Send(ERDPTH, TXSTART >> 8);
// 写入包大小低字节和高字节
SPI_Send(ETXNDL, size & 0xFF);
SPI_Send(ETXNDH, size >> 8);
// 发送数据包
for (uint16_t i = 0; i < size; i++) {
SPI_Send(EWRPTL, packet[i]);
}
// 提交数据包
SPI_Send(ECON1, ECON1_TXRTS);
}
// 数据接收函数示例
void ENC28J60_ReceivePacket(uint8_t *packet, uint16_t *size) {
// 检查是否有包可读
uint8_t bfrcon = SPI_Send(0x1C, 0x00); // 读取BFRCON寄存器
if (bfrcon & 0x80) {
// 读取包大小
*size = SPI_Send(ERDPTL, 0x00);
*size |= SPI_Send(ERDPTH, 0x00) << 8;
// 读取数据包
for (uint16_t i = 0; i < *size; i++) {
packet[i] = SPI_Send(EWRPTL, 0x00);
}
} else {
*size = 0; // 没有包可读
}
}
5.3.2 网络数据包处理与传输实践
在网络数据包处理与传输实践中,ENC28J60驱动的核心任务是发送和接收数据包,同时处理可能出现的各种网络事件。比如,驱动需要处理以太网的碰撞、重试次数限制等。另外,根据TCP/IP协议栈的需求,可能需要进行数据包的缓冲管理和错误检测。
下面是关于如何实现网络数据包的处理和传输的一个简要说明:
- 以太网帧结构解析: 在发送和接收时,驱动必须能正确解析以太网帧的结构,这包括目的地址、源地址、类型字段和数据部分。
- 错误检测: 驱动要实现对数据包的校验,包括CRC校验和,确保数据的正确性。
- 缓冲管理: 对于接收缓冲区,需要合理管理空闲缓冲区和已使用缓冲区,以便高效接收数据包。
- 事件处理: 实现中断或轮询方式的事件处理,及时响应接收、发送和错误事件。
示例流程:
- 驱动检测到接收中断时,调用接收函数ENC28J60_ReceivePacket。
- 根据解析的帧类型,驱动将数据包传递给上层应用或进行进一步处理。
- 发送数据包前,驱动需要构造以太网帧,包括添加MAC地址、类型字段和计算CRC校验和。
- 发送函数ENC28J60_SendPacket通过SPI将数据包写入ENC28J60的发送缓冲区,并触发发送操作。
这些步骤确保了网络通信的准确性和效率,为智能家居网关提供了稳定的网络连接。通过驱动实现和硬件的紧密配合,ENC28J60可以实现高效的数据包传输,为智能家居提供可靠的网络支持。
6. 智能家居网关程序的网络通信实现
6.1 UDP通信协议基础与实现
6.1.1 UDP协议原理与特点
用户数据报协议(User Datagram Protocol,UDP)是一种无连接的网络通信协议,它提供了一种快速、无序、无连接、无需建立会话的数据传输方式。UDP不保证数据包的顺序和完整性,也不提供数据包丢失的检测和重传机制。这些特性使得UDP在某些实时应用中非常有用,如视频会议、在线游戏和流媒体,因为它们可以容忍少量的数据包丢失,而更关心传输的低延迟。
6.1.2 基于STM32F407的UDP通信编程
在STM32F407微控制器上实现UDP通信,首先需要准备网络相关的硬件组件,比如ENC28J60以太网控制器,然后通过相应的网络库(如LwIP)来实现协议栈的功能。以下是一个简单的UDP客户端示例代码,用于发送和接收数据。
#include "lwip/udp.h"
#define UDP_CLIENT_PORT 7
#define UDP_SERVER_IP "192.168.1.100"
#define UDP_SERVER_PORT 12345
struct udp_pcb *udp_client_pcb;
void udp_receive_callback(void *arg, struct udp_pcb *pcb, struct pbuf *p, const ip_addr_t *addr, u16_t port) {
if (p != NULL) {
// 数据处理逻辑
printf("Received UDP message from IP %s, port %d\n", ipaddr_ntoa(addr), port);
// 释放接收到的数据包
pbuf_free(p);
}
}
void udp_client_init() {
// 创建UDP控制块
udp_client_pcb = udp_new();
if (!udp_client_pcb) {
printf("Error creating new PCB.\n");
return;
}
// 绑定本地端口
struct ip_addr local_ip;
IP4_ADDR(&local_ip, 192, 168, 1, 10); // 本地IP地址
udp_bind(udp_client_pcb, &local_ip, UDP_CLIENT_PORT);
// 设置接收回调函数
udp_recv(udp_client_pcb, udp_receive_callback, NULL);
// 构造并发送数据包
struct pbuf *p = pbuf_alloc(PBUF_TRANSPORT, strlen("Hello UDP server!"), PBUF_POOL);
pbuf_take(p->payload, "Hello UDP server!", strlen("Hello UDP server!"));
udp_sendto(udp_client_pcb, p, &ip_addr_any, UDP_SERVER_PORT);
// 释放数据包内存
pbuf_free(p);
}
int main(void) {
// 系统初始化代码
// ...
// 初始化UDP客户端
udp_client_init();
// 其他应用代码
// ...
return 0;
}
在这个代码示例中,我们创建了一个UDP客户端,绑定了本地端口,并通过 udp_recv 函数设置了数据接收的回调函数。当接收到数据时,回调函数 udp_receive_callback 会被触发。我们还展示了如何构造一个UDP数据包,并向服务器发送“Hello UDP server!”消息。
请注意,实际开发中需要根据网络环境和硬件配置,对上述代码进行适当的调整和扩展。还需要考虑错误处理、网络重连等实际问题。
6.2 物联网(IoT)技术在智能家居的应用
6.2.1 物联网技术与智能家居的结合
物联网(Internet of Things, IoT)技术为智能家居带来了革命性的变化,它通过互联网将各种家居设备连接起来,实现了设备间的通信和数据交换,从而提供更加智能、便捷和节能的家居生活体验。
在智能家居中,物联网技术的应用包括但不限于:
- 智能照明:根据用户的行为和外部环境自动调节室内照明。
- 安全监控:门窗传感器、摄像头等设备的实时监控与报警。
- 能源管理:智能插座、温控器等设备的能耗监测与优化控制。
- 健康护理:与健康监测设备的数据交互,关注居住者的健康状态。
6.2.2 安全性与隐私保护的考量
随着智能家居系统的日益普及,安全性与隐私保护成为了重要的议题。为保护用户数据和家庭安全,物联网设备需要采取以下措施:
- 加密通信:确保数据在传输过程中的安全性,使用SSL/TLS等加密协议保护数据。
- 访问控制:实施严格的身份验证机制,限制未授权用户的访问。
- 数据保护:对存储在设备和服务器上的用户数据进行加密,防止数据泄露。
- 定期更新:及时更新固件和软件,修补安全漏洞。
智能家居系统的设计和实施过程中,安全和隐私保护应当作为核心考虑因素,以避免造成不可逆的损失。
6.3 C/C++在网络通信中的编程要求
6.3.1 C/C++在网络编程中的优势
C/C++因其高效的性能和对硬件的直接控制能力,在网络编程中占据了重要的地位。C++作为一个支持面向对象编程的语言,为网络通信提供了丰富的抽象和封装工具,便于开发者构建复杂的网络协议和应用程序。
以下是使用C/C++在网络编程中的几个优势:
- 性能 :C/C++允许开发者进行底层硬件操作,减少不必要的抽象,从而实现高性能。
- 控制 :高级语言提供的抽象层较少,因此开发者可以更精确地控制资源分配和释放。
- 灵活性 :C/C++提供了丰富的库和API,支持多种网络协议栈,方便实现定制化需求。
- 跨平台 :通过适当的抽象,C/C++代码可以跨平台编译和运行,易于维护和移植。
6.3.2 网络编程中的内存管理与错误处理
在进行网络编程时,C/C++语言中的内存管理是至关重要的。正确地分配和释放内存,以及合理地处理错误,是保证程序稳定运行的关键。
以下是一些内存管理与错误处理的要点:
- 动态内存分配 :在C语言中,应当使用
malloc(),calloc(),realloc()等函数动态分配内存,并使用free()释放不再使用的内存。在C++中,则更多使用new和delete操作符。 - 智能指针 :C++11引入了智能指针(如
std::unique_ptr,std::shared_ptr),以自动管理内存,减少内存泄漏的风险。 - 错误检查 :网络编程中应当对API调用进行错误检查。例如,返回值为-1的系统调用(如
send()和recv())应该检查errno并进行相应处理。 - 异常处理 :在C++中,可以使用异常处理机制捕获和处理运行时错误,使代码更加清晰和健壮。
通过适当的内存管理和错误处理,可以确保网络通信程序的健壮性和稳定性,避免常见的安全漏洞和程序崩溃。
6.4 TCP/IP协议栈在嵌入式系统中的应用
6.4.1 TCP/IP协议栈的基础知识
TCP/IP是互联网最核心的通信协议,它为网络通信提供了可靠、有序和错误检查的数据传输服务。TCP/IP协议栈通常由四层组成,每一层都负责不同的功能:
- 链路层 :负责在相邻节点间的数据传输。
- 网络层 :负责主机间的数据传输,IP协议是其核心。
- 传输层 :提供端到端的数据传输,TCP和UDP协议位于这一层。
- 应用层 :负责为应用提供网络服务,如HTTP, FTP等协议。
6.4.2 协议栈在智能家居网关中的配置与调试
在智能家居网关中配置和调试TCP/IP协议栈,首先要确保硬件(如STM32F407)与网络控制器(如ENC28J60)能够正确地进行通信。接下来,需要将TCP/IP协议栈集成到固件中,并进行以下步骤:
- 初始化网络接口 :配置网络接口的MAC地址和IP地址。
- 配置协议栈参数 :设置TCP/IP协议栈的各个参数,如缓冲区大小、超时时间等。
- 运行和调试 :启动网络协议栈,并通过测试来验证配置的正确性。使用ping命令测试网络连通性,使用数据包嗅探器分析网络流量。
- 错误处理和优化 :针对网络中出现的问题进行调试,并对性能瓶颈进行优化。
通过以上步骤,可以确保智能家居网关中的TCP/IP协议栈能够稳定运行,并为网络通信提供坚实的基础。
6.5 未来之家开源平台应用探索
6.5.1 开源平台的选择与集成
在智能家居领域,有许多开源平台可供选择,如OpenHAB、Home Assistant等。选择合适的开源平台是实现智能家居网关程序的重要一步。集成时,应考虑以下因素:
- 平台特性 :根据项目需求选择具有必要功能的平台。
- 社区支持 :选择活跃的社区,以便在遇到问题时能够获得帮助。
- 文档与教程 :良好的文档和教程可以加快开发进程。
- 插件与扩展 :支持插件或扩展的平台可以提供更多灵活性。
集成过程通常包括下载和配置平台软件、确保所有依赖项都已安装并运行,以及进行必要的配置调整以适应特定的硬件环境。
6.5.2 在开源平台上开发智能家居应用实例
在选定的开源平台上开发智能家居应用实例,可以采用以下步骤:
- 环境准备 :设置开发环境,包括安装必要的开发工具和平台软件。
- 硬件接口 :配置硬件接口和设备,确保它们能够与平台兼容。
- 应用开发 :利用平台提供的API编写控制逻辑和用户界面。
- 调试与测试 :对应用进行调试,确保其稳定运行,并在真实设备上进行测试。
- 部署与优化 :将应用部署到网关设备上,并根据反馈进行优化。
通过在开源平台上开发应用,可以快速地实现智能家居网关的功能,并利用社区资源进行创新和改进。
简介:本项目介绍了一款基于STM32F407微控制器的智能家居网关程序设计。该程序作为智能家庭网络的中心,实现了与各种智能设备的通信协调。STM32F407微控制器具备高性能和低功耗的ARM Cortex-M4内核,并拥有浮点单元,适合复杂算法的应用。程序集成了ENC28J60以太网控制器,使得设备可以通过SPI接口连接TCP/IP网络。智能家居系统还依赖于名为“未来之家”的开源测试平台实现远程控制,提供API和SDK供开发者使用,以实现设备的场景联动与控制。此外,系统支持UDP通信协议,适合实时性要求高的通信需求。项目涵盖嵌入式系统开发、C/C++编程、TCP/IP协议栈、STM32系列MCU和ENC28J60模块等技术要点。

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









