






原标题:机器人指令编辑介绍(二)
程序编辑界面,编辑(EDCMD)中有一系列的功能选项,本文将对指令编辑(DECMD)中的“插入”、“删除”及“复制/剪切”做详细介绍。

1.插入(Insert)
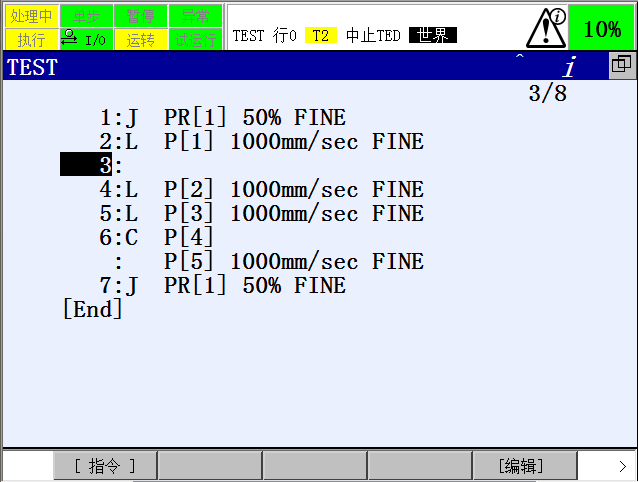
该选项的功能作用是:在光标之前添加所需数量的空白行。插入空白行后,重新赋予新的编号。
在程序编辑过程中,如果要在现有语句之间补充添加新的指令,需要先进行空白行的插入,将新指令添加在空白行上。否则,原有指令将被新添加的指令覆盖。
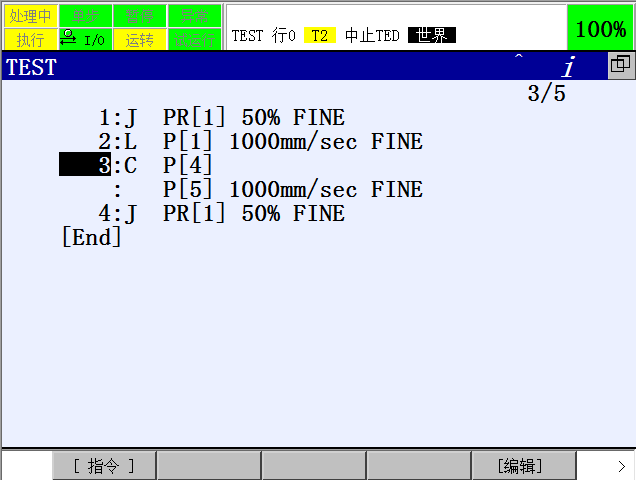
原程序如下图所示:
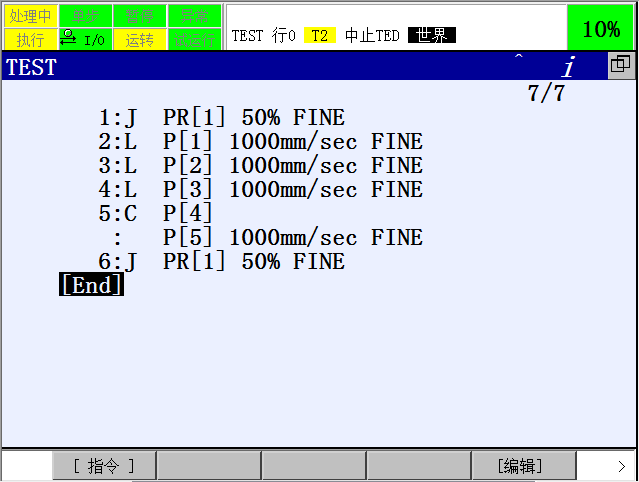
若要在2、3行间插入新的位置点,则需先在3行前插入1行空白行。
具体步骤如下:
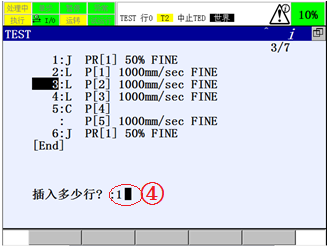
1)将光标移至行3;
2)选择F5编辑命令;
3)选择“插入”选项

4)输入所需行数,确认后即可。
2.删除(Delete)
该选项的功能作用是:将所指定范围的程序语句从程序语句从程序中删除。删除程序语句后,重新赋予新的编号。
下图中,若要删除行3至行5,具体步骤如下:
1)将光标移至行3;
2)选择F5编辑命令;
3)选择“删除”选项

4)下拉光标选中3至5行;
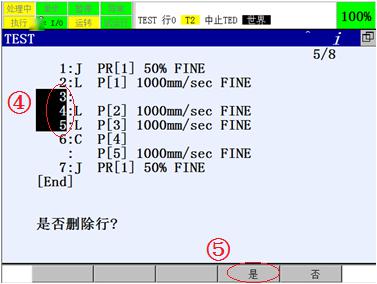
5)按F4确认。
注意:该命令能够删除单行指令或连续的多行指令,不能一次完成跳行删除 。
3.复制/剪切(Copy/Cut)
该选项的功能作用是:复制/剪切一连串的程序语句集,然后插入粘贴到程序中的其他位置。程序语句一经复制,便可多次在本程序或其他程序中插入粘贴使用。
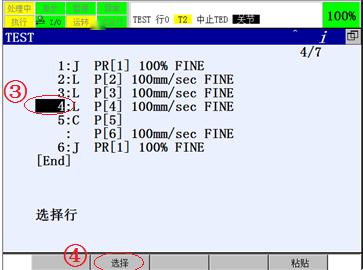
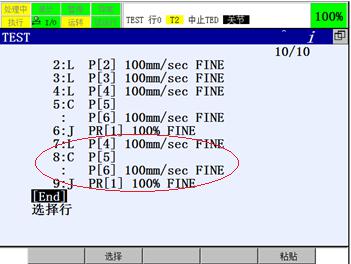
对下图中程序的4至6行执行复制或剪切,具体步骤如下:
复制/剪切
1)选择F5编辑命令;
2)选择“复制/剪切”选项;

3)下移光标至行4;
4)点击F2-选择,确认复制开始位置;
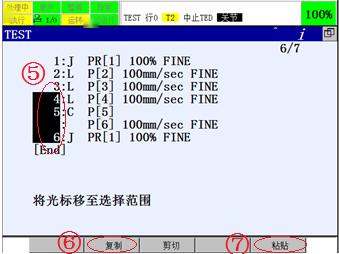
5)下拉光标选中复制/剪切的范围;
6)点击F2-复制/F3-剪切,将所需内容保存至存储器;
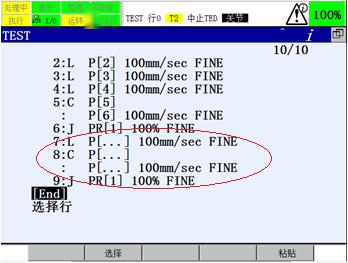
7)完成复制或剪切后,移动光标到需要粘贴的行号处,按F5-粘贴并选择合适的粘贴方式进行粘贴。
说明:执行粘贴操作,无需预先插入空白行。
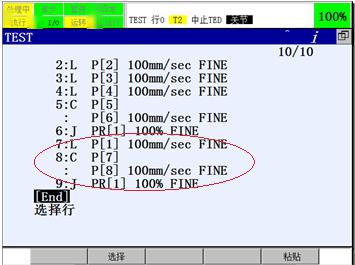
粘贴
如图所示,常规粘贴方式有“逻辑”、“位置ID”、“位置数据”;

① 逻辑粘贴
仅保留原程序的框架,不保留位置信息。指令中的位置点需要重新示教。
② 位置ID
保留原程序的位置编号及位置数据。不做任何修改,原样粘贴。
③ 位置数据
保留原程序的位置数据,但更新原程序的位置编号。
选择F5-粘贴后按NEXT键切换功能键第二页,可进行 逆序粘贴。

④ R-LOGIC
保持与复制源动作指令相同的格式,进行相反顺序的插入粘贴(不保留位置数据)。
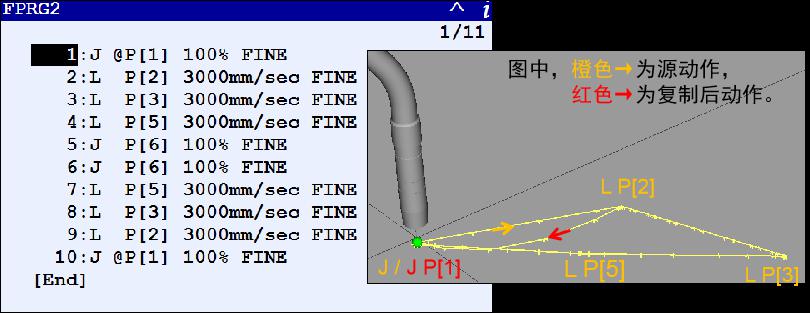
⑤ R-POSID
保持与复制源动作指令相同的位置ID及格式,按照相反顺序插入粘贴。
如下图所示,以R-POSID方式逆序粘贴后,复制后轨迹与原轨迹不完全重合。
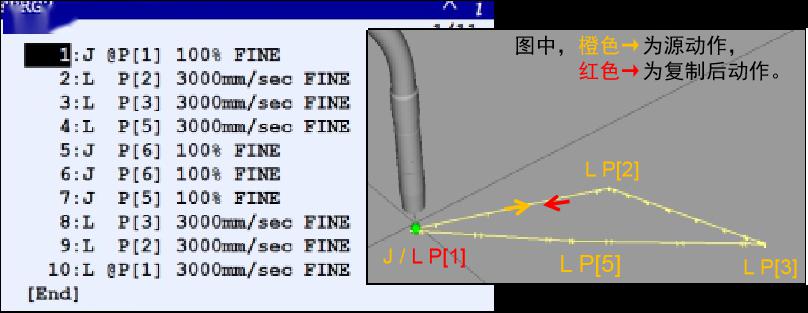
⑥ RM-POSID
保持与复制源动作指令相同的位置编号,按照相反顺序插入粘贴(会自动变更各动作指令的动作类型、动作速度)使动作与复制源的动作完全相反。
如下图所示,以RM-POSID方式逆序粘贴后,复制后轨迹与原轨迹完全重合。
⑦ R-POS
在与复制源的动作指令的位置数据保持相同,而位置编号被更新的状态下,按照相反顺序插入粘贴。
⑧ RM-POS
在与复制源的动作指令的位置数据保持相同,而位置编号被更新的状态下,按照相反顺序插入粘贴。同时,自动变更各动作指令的动作类型、动作速度,使动作与复制源的动作完全相反。
说明:RM-POSID/RM-POS两种方式则能够自动调整动作指令要素,使逆序粘贴轨迹与原轨迹重合。而R-POSID/R-POS两种方式仅将指令完全逆序进行粘贴。
责任编辑:














 8998
8998











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









