






#Android 的坐标系及矩阵变换
##Android的坐标系
##2D坐标系
android的2d坐标系如图所示,水平向右为X轴正方向,竖直向下为Y轴正方向,原点为屏幕左上角。
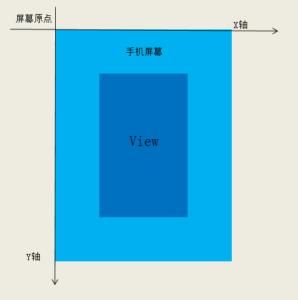
注意:以屏幕左上角为原点的坐标系,称作绝对坐标系,将原点平移到View的左上角,称作相对坐标系。对View进行操作时,更多使用的是相对坐标系。
##3D坐标系
###左手坐标系
在计算机科学中,大多3D坐标系使用的是左手坐标系(包括Android),所以,在这里只介绍左手坐标系。
用左手确定3D坐标系:
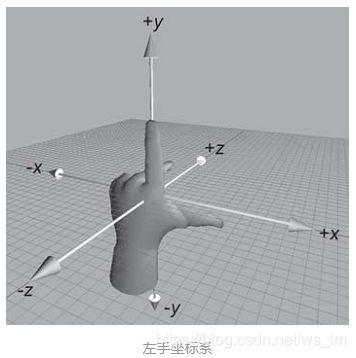
在Android设备中反应出的3D坐标系是,X轴水平向右,Y轴竖直向上,Z轴垂直屏幕指向屏幕内部。
有没有觉得很疑惑,明明在2D坐标系中Y轴正方向是竖直向下的,怎么到3D坐标系就变成竖直向上了?其实,2D坐标系和3D坐标系是没有直接关系的,绘制View使用的是2D坐标系,3D坐标系则是进行3D变换,求得3D变换矩阵。2D坐标通过3D变换矩阵,改变x坐标和y坐标。
注意:2D和3D坐标系之间没有直接关系
同样,根据坐标原点的不同也可分为绝对坐标系和相对坐标系。
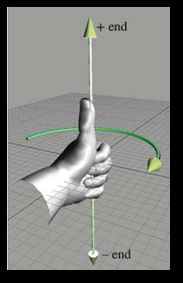
###确定旋转正方向
由于使用的是左手坐标系,伸出左手,握住坐标系,大拇指指向轴的正方向,四指指向的方向即为旋转的正方向。如图所示:
###屏幕上点的表示
在屏幕上显示的点,不仅仅有x,y坐标(这里的x,y坐标是2D坐标系的坐标),其实还有z轴的影响,z轴坐标可以理解成物体与镜头的距离。所以这里对应的像素描述由一个3行一列的矩阵来表示:

x,y分别代表x,y轴上的坐标,而1代表屏幕在z轴上的坐标为默认的。如果将1变大,那么屏幕会拉远, 图形会变小。
###旋转变化的是坐标系
任何变换都是基于坐标系变化发生的。比如,绕Z轴旋转,改变的是点在XOY平面的映射,所以绕Z轴旋转等同于XOY的坐标系旋转后,旧坐标系的点在新坐标系中的坐标的计算过程。计算过程如下:
在原坐标系xoy中, 绕原点沿逆时针方向旋转θ度, 变成座标系 sot。
设有某点p,在原坐标系中的坐标为 (x, y), 旋转后的新坐标为(s, t)。
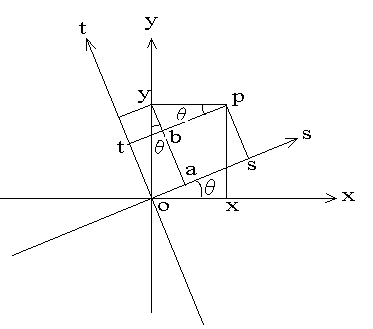
oa = y sin(θ) (2.1)
as = x cos(θ) (2.2)
综合(2.1),(2.2) 2式
s = os = oa + as = x cos(θ) + y sin(θ)
t = ot = ay – ab = y cos(θ) – x sin(θ)
用行列式表达如下:
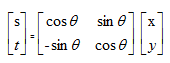
由上面的结果可以得出绕Z轴旋转的变换矩阵为:
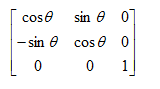
更多3D旋转矩阵可参考:
http://blog.csdn.net/zsq306650083/article/details/8773996
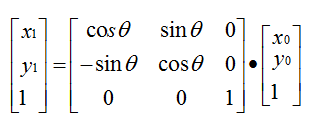
###变换矩阵在2D平面的表现
根据绕Z轴旋转的变换矩阵,可以求得旋转后的坐标。θ为绕Z轴旋转角度,P0(x0,y0,1)为旋转前的坐标,P1(x1,y1,1)为旋转后的坐标。
计算出:
由此可以得到在XOY平面的旋转示意图:
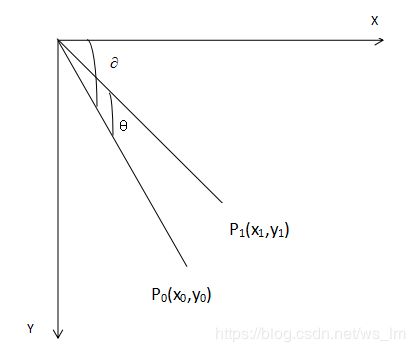
可以看到,变换矩阵不仅决定点变换后的坐标,也决定了点旋转的方向。
###矩阵的初等变换
上面的矩阵相乘用到的是矩阵初等变换的知识,这里贴一下矩阵初等变换的一些结论:

###改变旋转的中心点
以上得出的绕Z轴旋转的旋转矩阵是基于原点,如果要改变旋转的中心点,该怎么做?
设中心点坐标O1(x2,y2,1),P0(x0,y0,1),XO1Y坐标系中P1(x1,y1,1),变换后P3(x3,y3,1)。
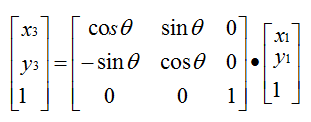
经过旋转矩阵变换P3的坐标:
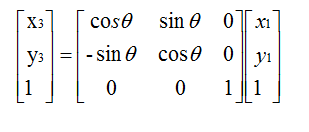
P0和P1之间的关系:
P3的坐标:
由于有:
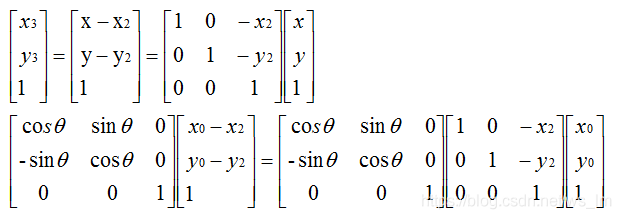
最终得到P3在XOY坐标系的坐标:
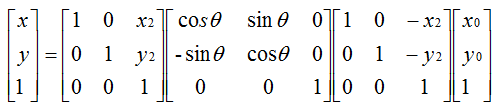
上面是纯数学计算过程,其实通过矩阵的初等变换来更好理解和记忆:
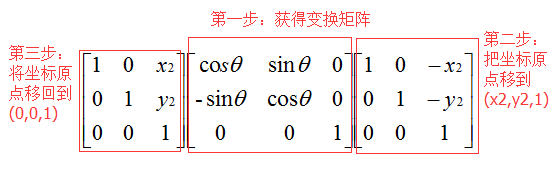
所以,在获得变换矩阵后,如果需要改变中心点坐标,通常会使用下面两行代码:
matrix.preTranslate(-centerX,-centerY);
matrix.postTranslate(centerX,centerY);
###关于Camera类
为了方便获取变换矩阵,Android提供了Camera类获取变换矩阵,但是要注意,所有的变换都是基于原点的。
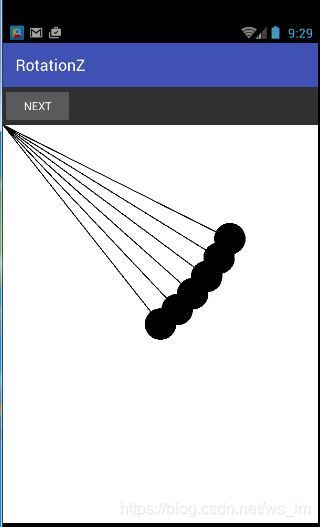
##绕Z轴旋转Demo
https://github.com/wslaimin/RotationZ.git
#参考文章
http://www.2cto.com/kf/201605/510416.html
http://blog.csdn.net/zsq306650083/article/details/8773996
http://blog.csdn.net/Tangyongkang/article/details/5484636
http://blog.csdn.net/flash129/article/details/8234599














 3475
3475











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









