







点击上方右侧“EDC电驱未来”可订阅哦!
作者:杜进辅 王峥嵘丨西安理工
现代工业的发展使高速齿轮传动的需求日益增加,如纯电动汽车为提高功率密度比,电机输出转速往往较高,甚至达到10 000 r/min以上。此时,时变啮合刚度与啮合冲击激励的作用规律与低转速下条件下是否一致,以及两者的影响比重是否改变都尚未明确。因此,研究高转速下时变啮合刚度以及啮合冲击对齿轮传动系统振动的影响,并探索相应的减振降噪方法,对高速齿轮传动系统的设计和应用具有重要意义。
本文以某纯电动汽车二级高速斜齿轮传动为研究对象,首先,建立了传动系统六自由度弯-扭-轴动力学模型;然后,基于承载接触分析(Loaded Tooth Contact Analysis,LTCA)计算了齿轮时变啮合刚度,并运用啮合冲击理论模型计算了冲击时间和冲击力幅值;最后,通过齿轮副啮合线方向的相对振动加速度的时域、频域,以及振动-转速图等结果,分析了时变啮合刚度激励、啮合冲击激励以及两者综合激励3种条件下系统的振动特性,为高速齿轮传动的设计应用提供参考。
1 斜齿轮副弯-扭-轴动力学模型本文以某纯电动汽车二级减速器中的高速输入级齿对作为研究对象,其基本参数和三维模型分别如表1和图1所示。
表1 斜齿轮副基本参数
Tab.1 Basic parameters of the helical gear pair
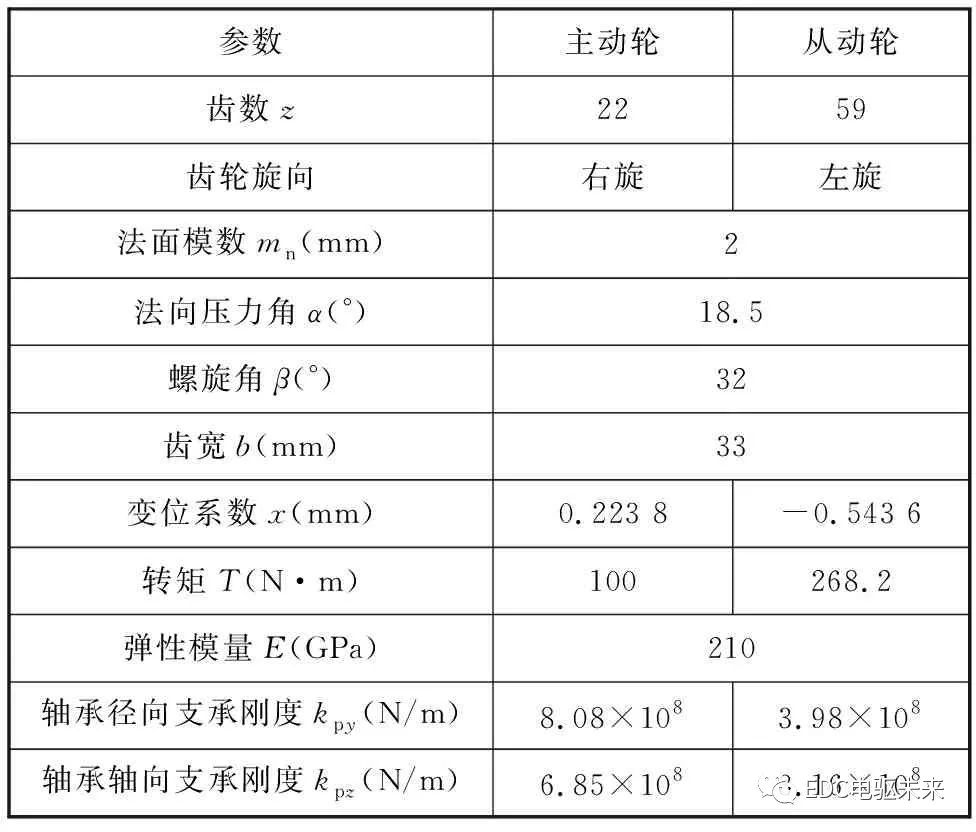
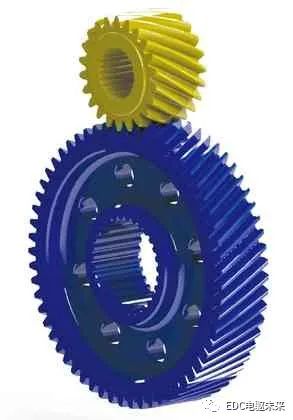
图1 斜齿轮副三维模型Fig.1 3D model of a helical gear
采用集中质量法建立斜齿轮传动的六自由度弯-扭-轴耦合动力学模型,如图2所示。根据图2所示动力学模型列出的微分方程组如下:
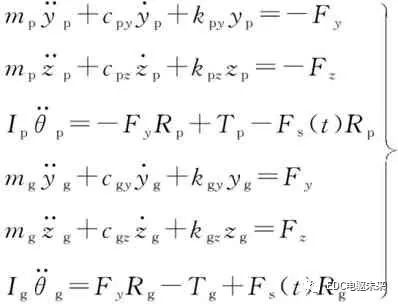
(1)
式中,mp、mg分别为主从动轮质量;Rp、Rg分别为主从动轮基圆半径;Tp、Tg分别为主从动轮转矩;yp、yg分别为主从动轮中心在y方向的振动位移;zp、zg分别为主从动轮中心在z方向的振动位移;Ip、Ig分别为主从动轮的转动惯量;θp、θg分别为主从动轮中心的扭转位移;kpy、kgy分别为主从动轮在y方向的等效支承刚度;kpz、kgz分别为主从动轮在z方向的等效支承刚度;cpy、cgy分别为主从动轮在y方向的等效支承阻尼;cpz、cgz分别为主从动轮在z方向的等效支承阻尼;Fs(t)为啮合冲击力。
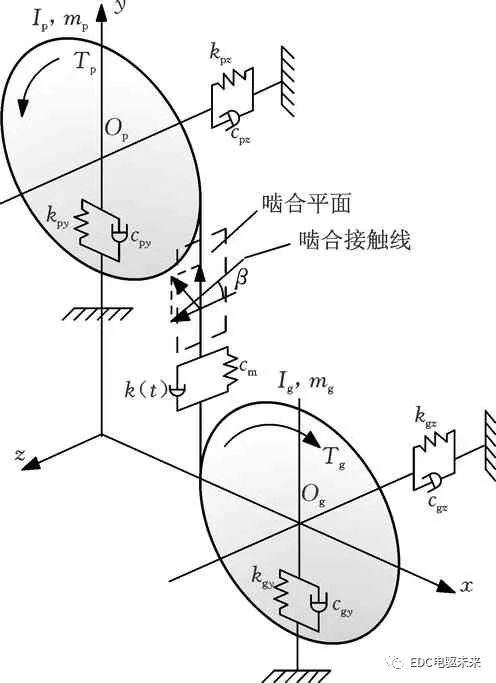
图2 斜齿轮弯-扭-轴动力学模型Fig.2 Bend-torsion-shaft dynamic model of helical gear
模型中切向动态啮合力和轴向动态啮合力以参数形式表达如下:
(2)
其中,β为螺旋角;α为压力角;k(t)为时变啮合刚度;cm为啮合阻尼,其计算公式如下:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章















 5208
5208











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









