






 本文汇总了ContextCapture Center(CC)软件在使用过程中的常见问题及其解决方法,涉及数据整理、空三计算和建模三大环节。包括:检查影像与POS对应关系、处理POS表格错误、调整空三设置、处理建模失败等问题。
本文汇总了ContextCapture Center(CC)软件在使用过程中的常见问题及其解决方法,涉及数据整理、空三计算和建模三大环节。包括:检查影像与POS对应关系、处理POS表格错误、调整空三设置、处理建模失败等问题。
ContextCapture Center软件作为倾斜摄影航测业内使用最广泛的软件之一,在使用过程中会遇到各种各样的问题。为此,我们整理了CC工作中遇到的常见问题与解决方法,分为数据整理、空三、建模三大部分,供大家参考。
一、数 据 整 理
1 影像与pos数量不一致 Pos与影像的关系:飞机飞行过程中每曝光一次GPS记录一个位置信息(pos)即pos跟影像为一一对应关系。问题一:pos数目比影像数量多(前提:每组镜头中的影像数量一致)解决办法:
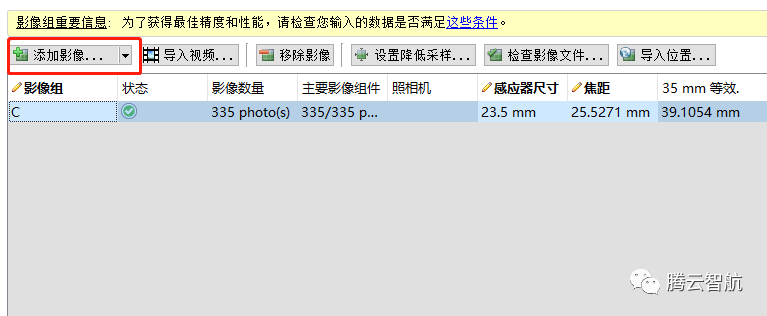
(1)选择一组影像(以下视影像为例)导入软件跑一边空三过程如下:新建区块→导入影像→提交空三
(2)用错误的pos建立pos表并导入(此时pos数目是错误的)
(3)进行对比
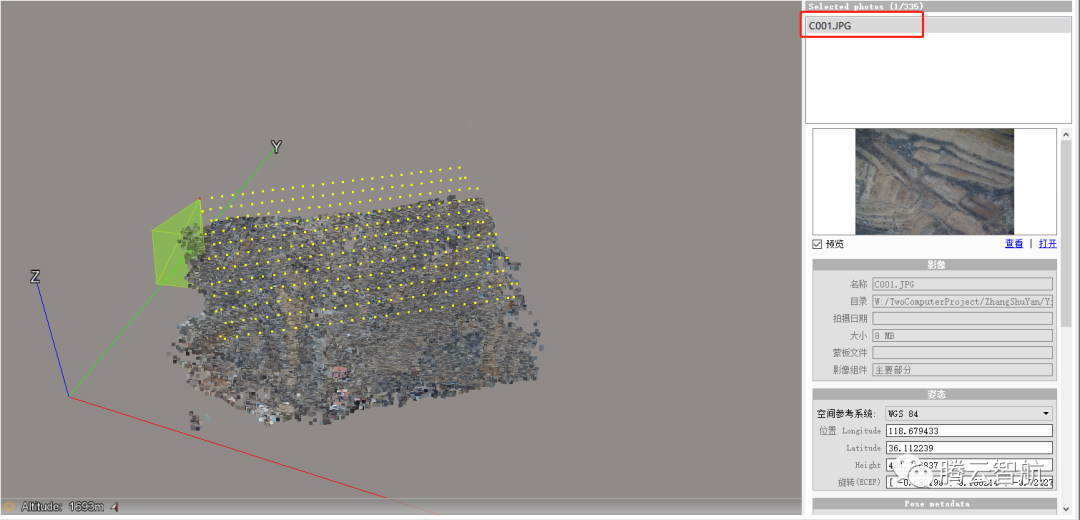
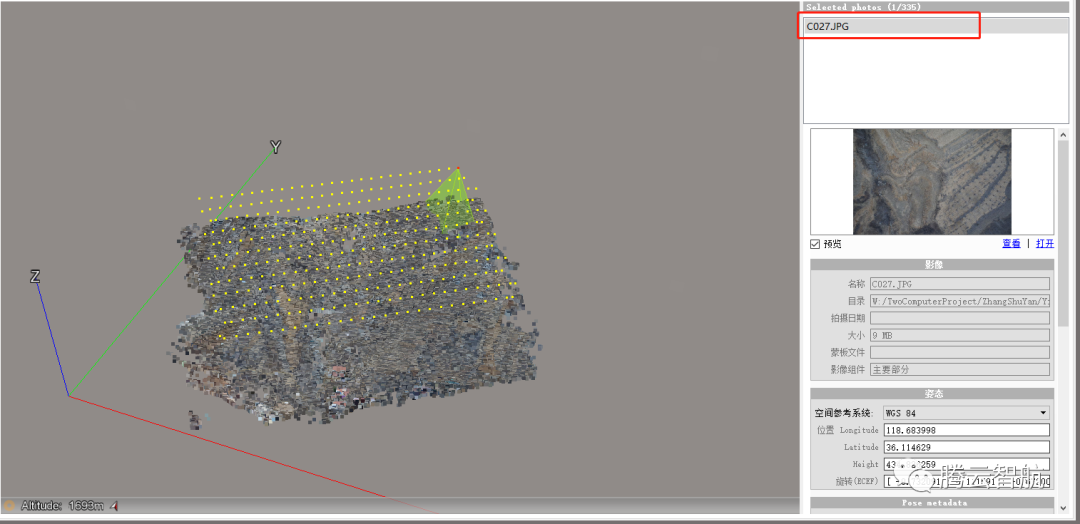
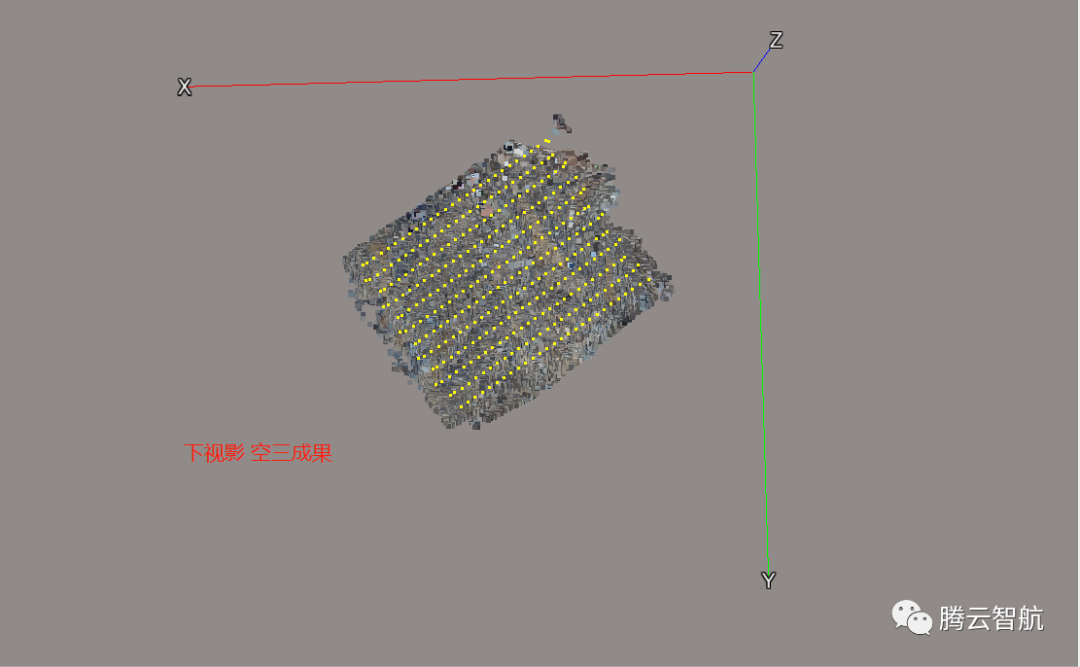
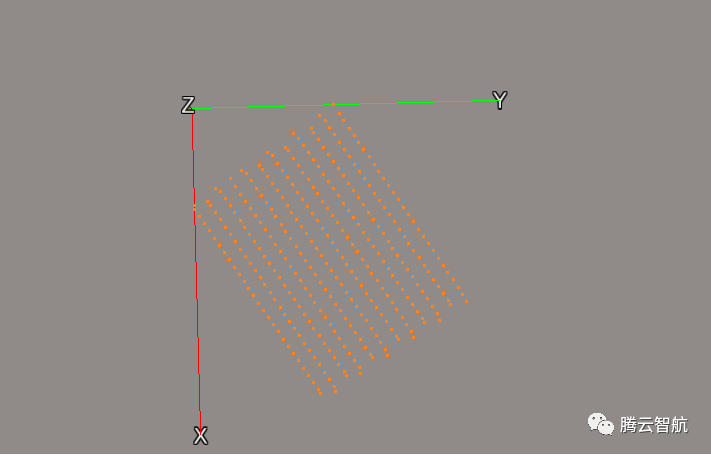
▲下视影像第一条航线为从C001到C027
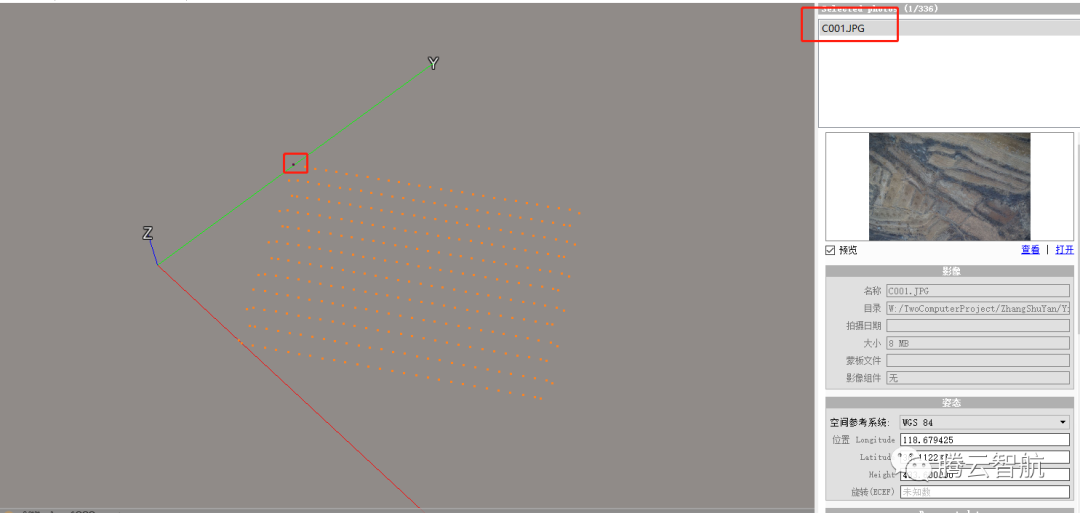
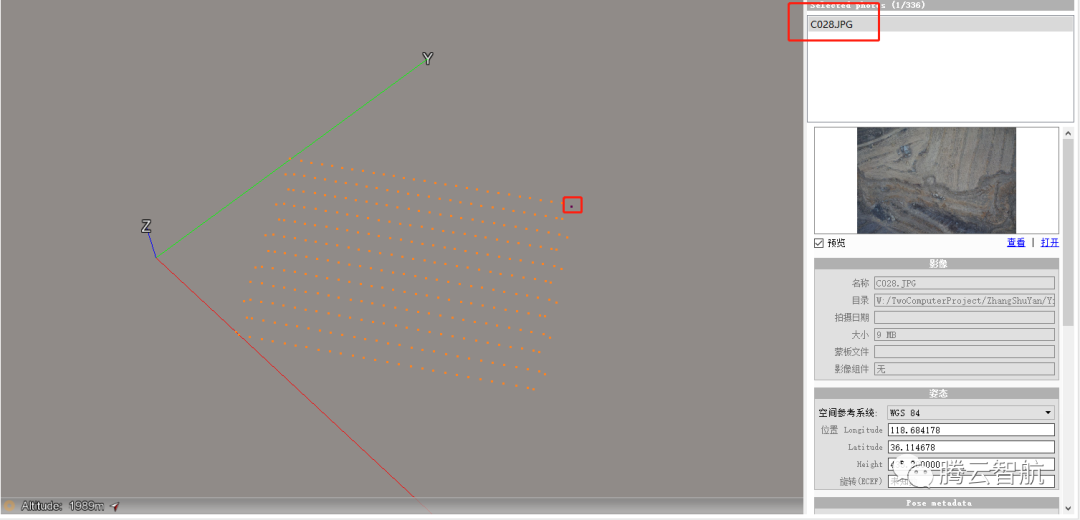
▲Pos第一条航线的影像为C001到C028
观察相对应的位置关系
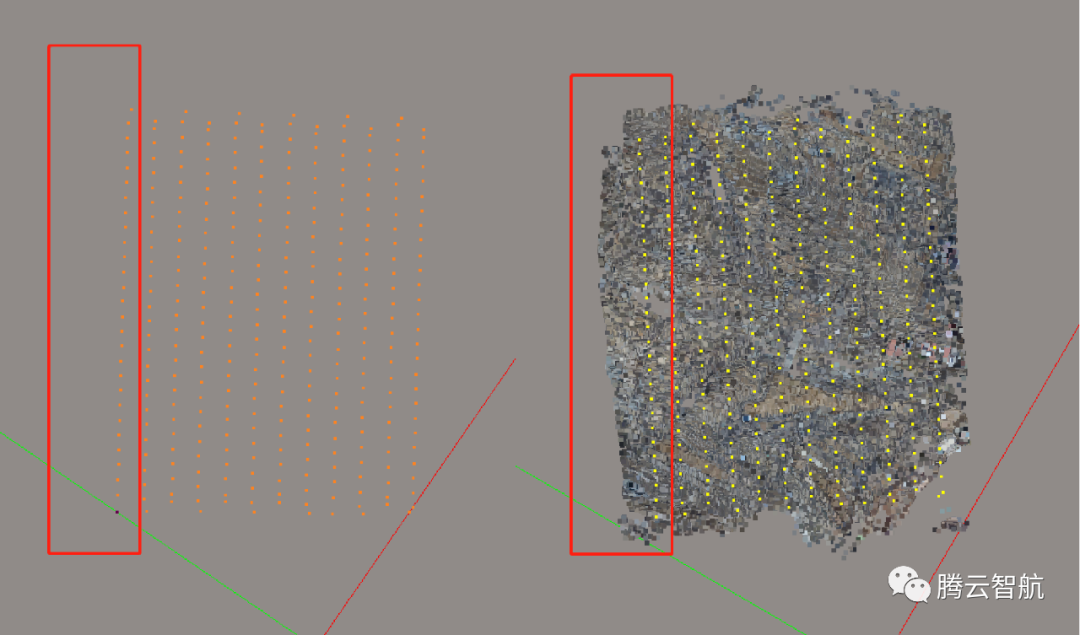

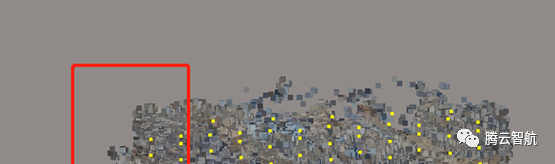
通过对应关系可明显看出C028这个POS是多出来的,从而进行删除。
温馨提示:pos比影像多的情况下一般在航线拐角处会出现多余pos。影像比pos多的情况原理一样经过对比删除影像即可。
2 数据导入问题一:用模板导入pos出现错误在“五相机pos模板”中,点击ContextCapture Center Master,新建一个工程,点击“区块”->”import”->“导入区块”。找到之前创建的pos数据excel。
解决办法
若出现以下两种错误:
A、cannot open “E:/***/pos.xls”这是因为,pos数据excel表存放在了中文命名的文件夹下,所以无法打开。
B、提示表格中有错误的工作表“Sheet 1”,这是因为CC软件有固定格式的表格样式,不能自己随意增删工作表。所以删除多余的”Sheet 1 ”工作表,可以成功导入。
问题二:导入照片后,再导入位置,出现乱码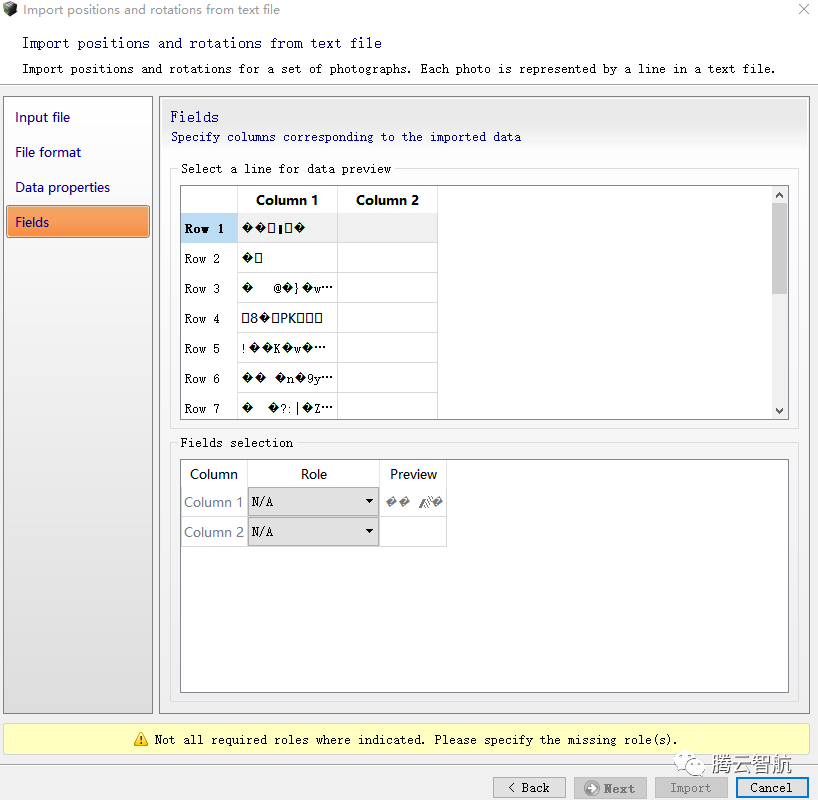
解决办法
即为导入的pos表格式不对,当在photo中导入位置时,导入的pos表格式应为.csv或.txt格式。
问题三:导入pos后及控制点后出现下面情况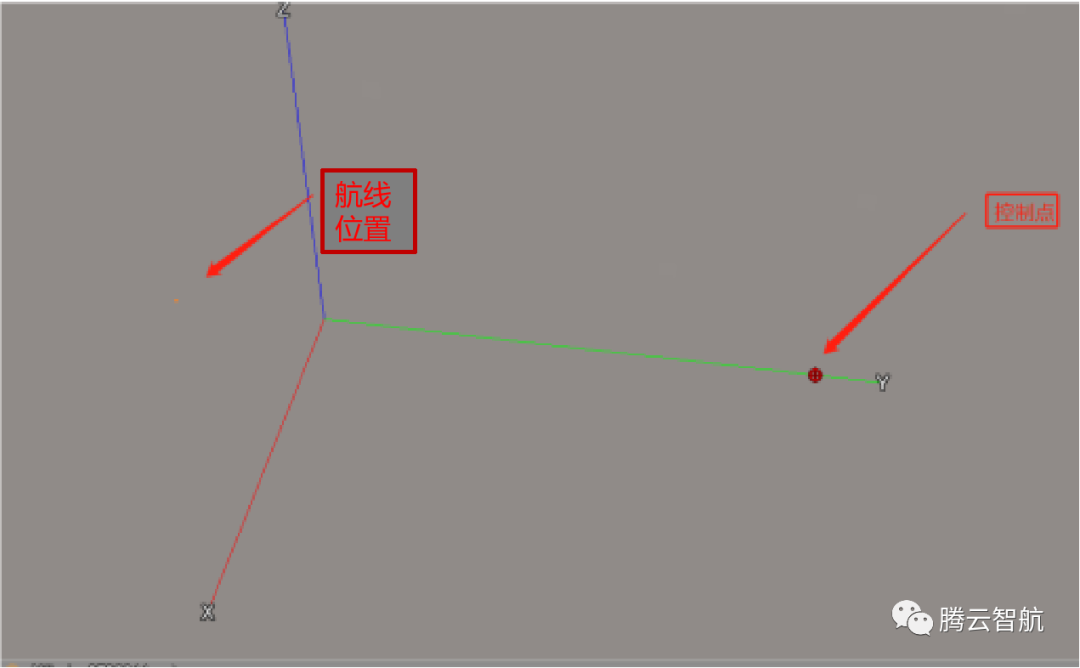
解决办法
3D视图中控制点不在航线下,检查坐标系无误后,确认pos表的经度纬度或x,y坐标导入顺序是否有误,如没有问题,即为控制点坐标x,y顺序相反。
二、空 三
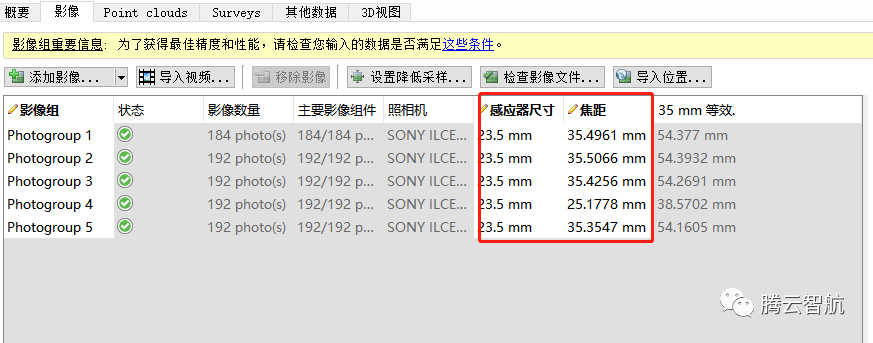
1 空三分层解决办法一:检查参数
检查软件识别的焦距及传感器尺寸是否正确,如果不一致,则会出现空三结果位置错误。
解决办法二:调整空三设置
A、空三计算设置过程中将关键点密度设置为高影像组件构成模式为多步。
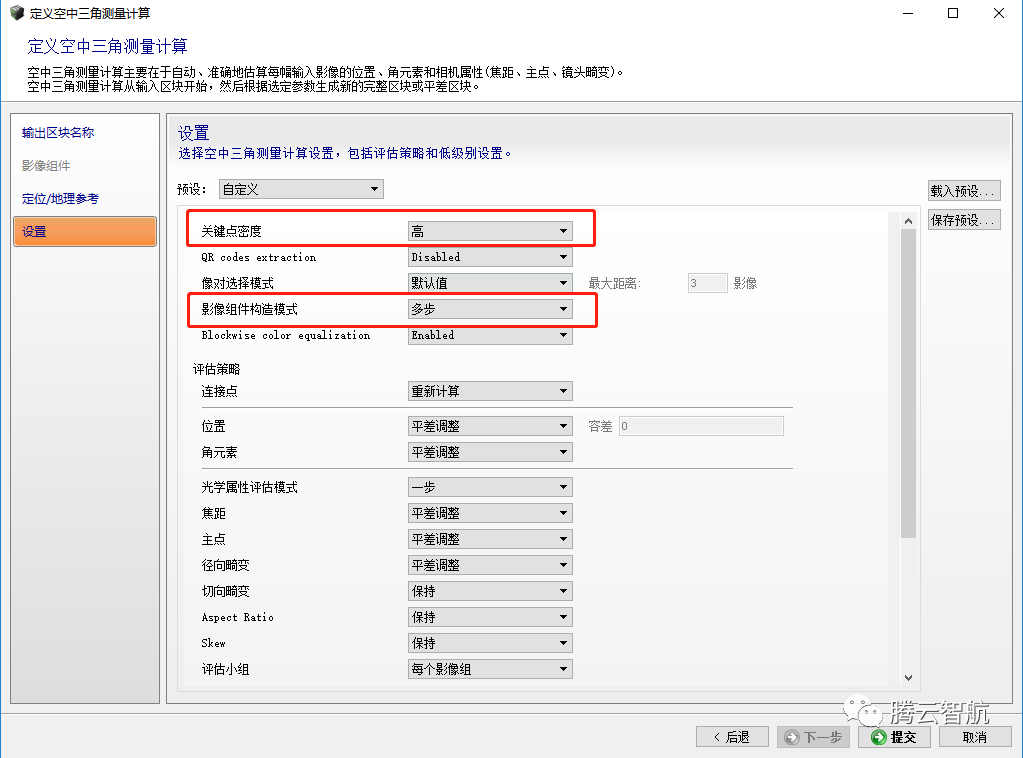
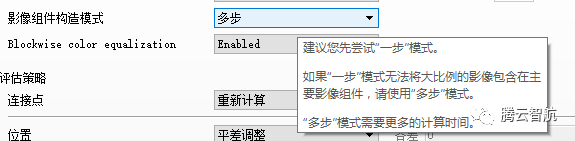
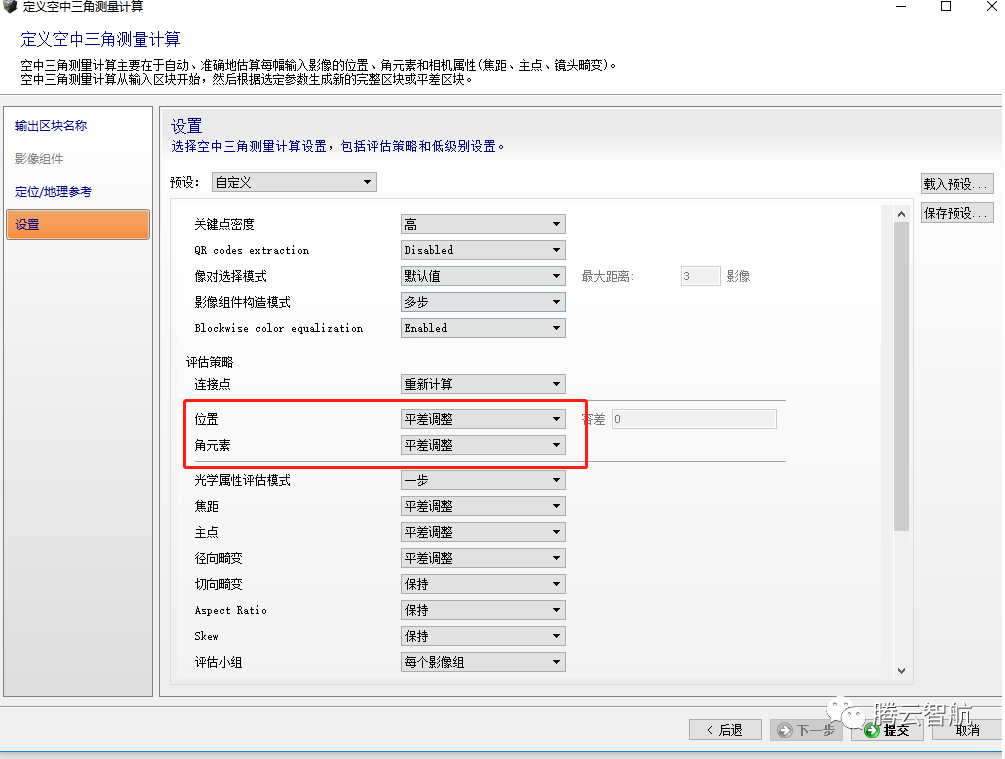
反复尝试几遍可以解决空三分层问题。
解决办法三:导入导出相机的光学属性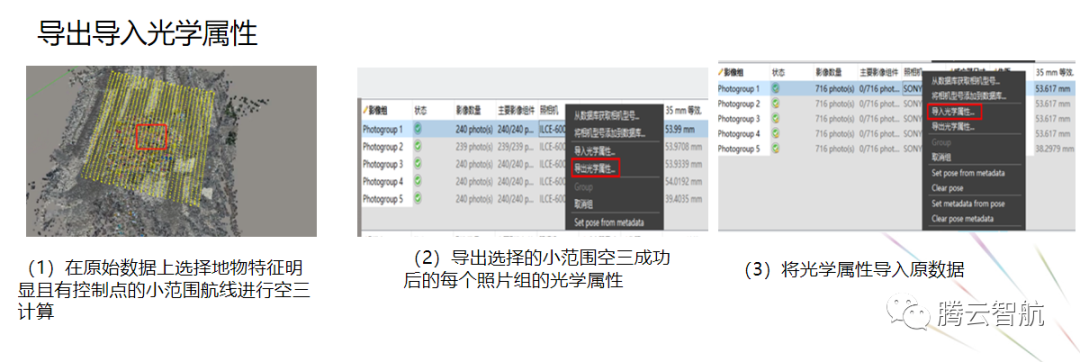
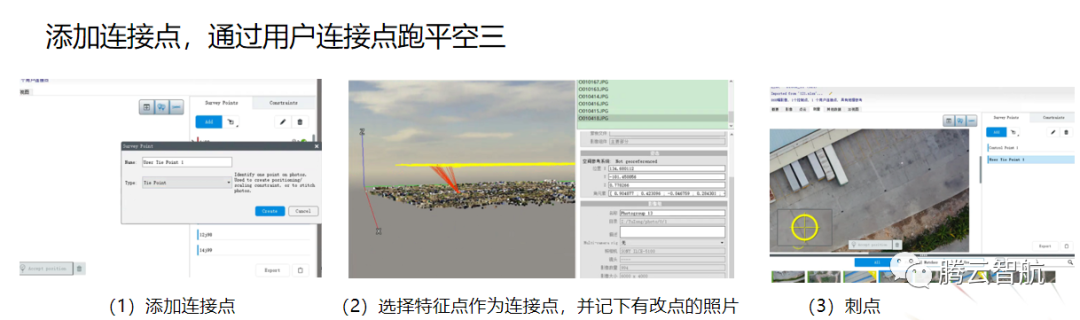
分层区域手动添加自动连接点。
用iFly倾斜助手生成姿态索引文件,有效解决空三分层。
设置相机位置对应的文件目录,制作正射镜头索引文件,经过软件空三计算后根据要求导出。选择任一种方式提取角度差文件,导入正射kml文件,导入角度差文件,生成姿态索引文件,导入软件中即可预测出控制点位置,方便刺点,提高效率。

详细流程点击>>倾斜摄影数据处理神助攻,航测内业不加班的诀窍
2 空三失败在进行空三计算失败时,有很多原因造成,下面列举几种比较常见的问题及解决方法。
问题一:数据量过大导致失败 现如今在进行空三计算时,建议单区块不超过一万五千张照片,当遇到数据量过大导致的失败时,我们有如下解决办法。解决办法
当数据量大时,将数据分为多个区块(注:区块之间有重叠区域或者公共控制点)进行空三计算,计算成功后,合并空三,再建模。
解决办法
由于照片文件夹改变位置或集群时访问不到其他电脑的数据,空三失败
A、 首先检查影像是否都能识别
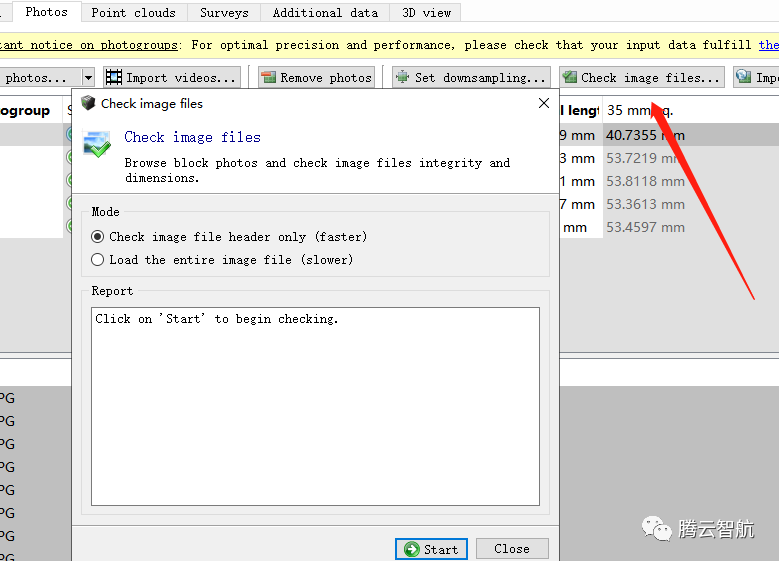
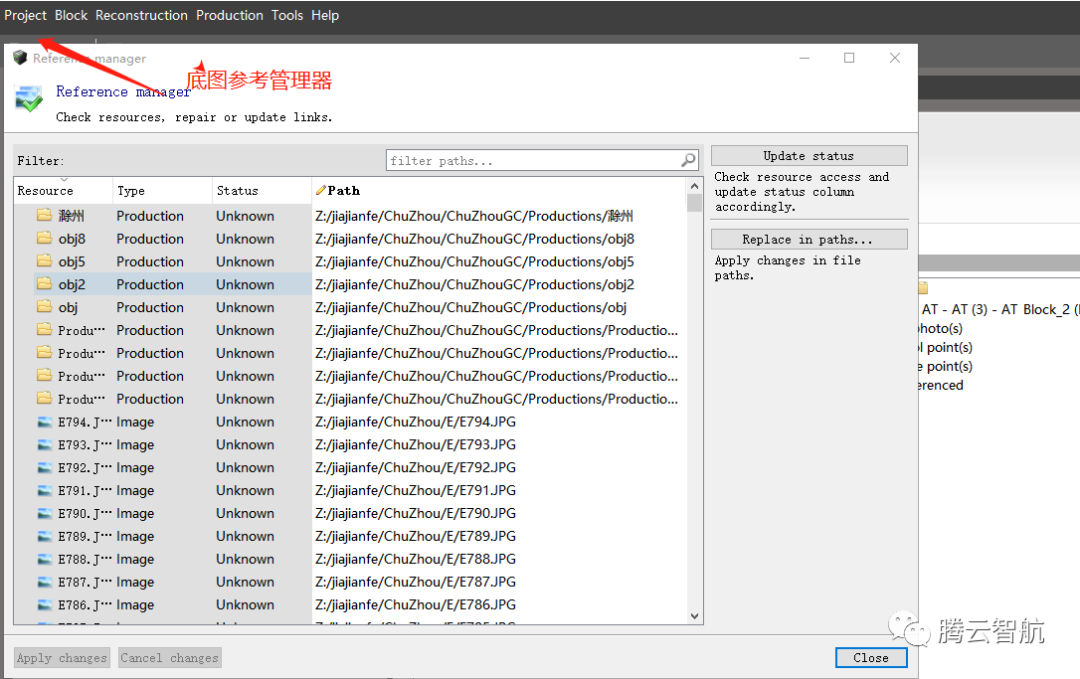
解决办法
磁盘空间不足时,空三则会失败,需要对磁盘进行清理。
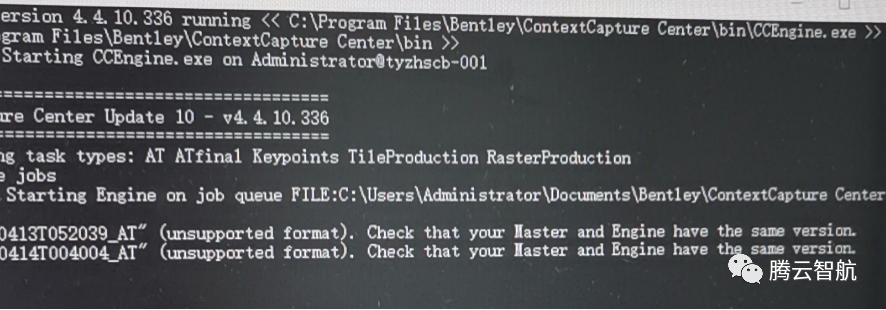
问题四:引擎是否开启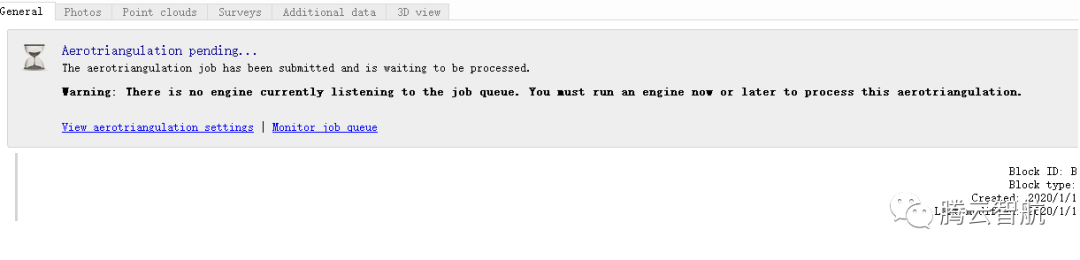
解决办法
如有以上提示,则需要开启引擎。
问题五:控制点刺点是否正确解决办法
如果空三失败,检查控制点刺点是否正确,如果某几个控制点3d错误过于大,则表示控制点刺点有问题,检查并修改,重新提交空三。
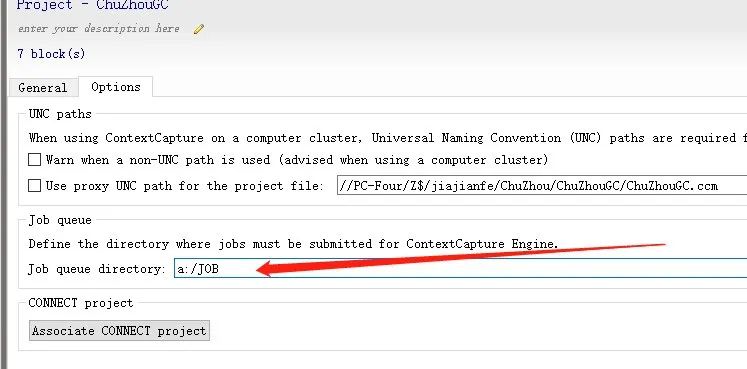
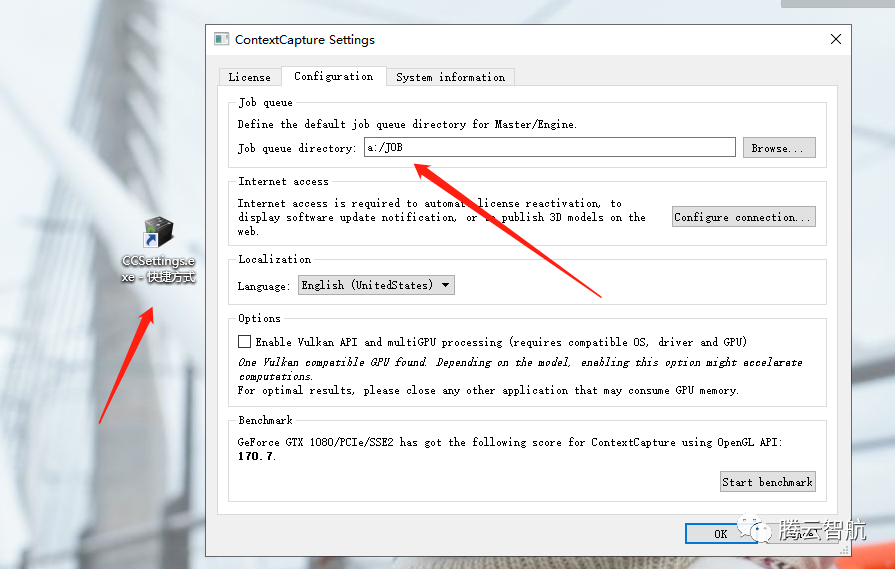
问题六:Job路径是否正确解决办法
检查CCsetting与工程中的job路径是否一致。
解决办法
清理Running中无效任务。
三、建 模
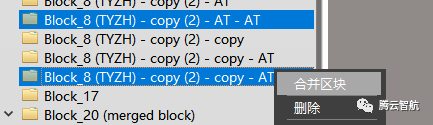
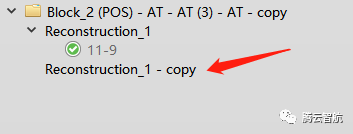
问题一:反复提交仍旧失败。提示失败:Reconstructing initial 3D mesh...

解决办法
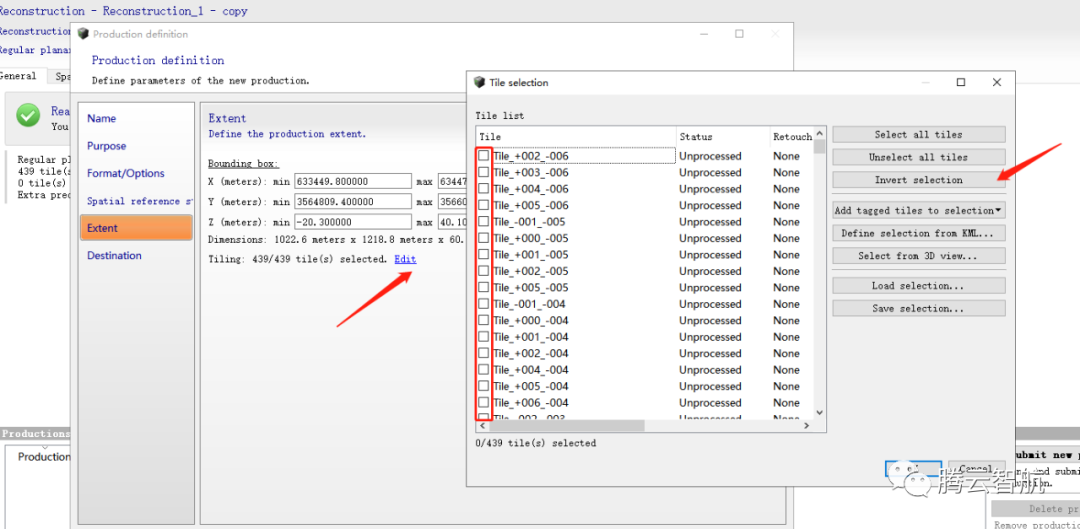
出现上图提示时,说明电脑在建模过程中断电或电脑死机造成缓存文件损坏,多次重新提交仍然失败,可以通过复制Reconstruction,重新提交失败的模型tile。
提示失败:Fialed during Photos pairwise matching...

解决办法
检查影像是否都能访问,重新提交即可。
问题三:全部失败解决办法
如果建模时tile连续失败,则是磁盘空间不足。清理磁盘空间重新提交即可。
问题四:分块过大解决办法
因电脑配置原因,建议分块时RAM使用量不超过电脑内存的三分之一。分块过大,当纹理过于复杂时,则会导致建模失败,重新分块提交即可。
作者/温美玉 编辑/石真真 - END -CC由基础→进阶非常全面详细的教程(pdf可下载)提高空三效率、提升模型效果
PhotoScan空三结果导入CC(Smart3D)中操作流程
CC (Smart3D)工作中遇到的空三「头疼」问题汇总,空三就看这篇!
CC(Smart3D)基础流程+水面补洞修复+模型修复一整套干货教程分享
无人机倾斜摄影1:500地形图测绘流程(CC+EPS)



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









