






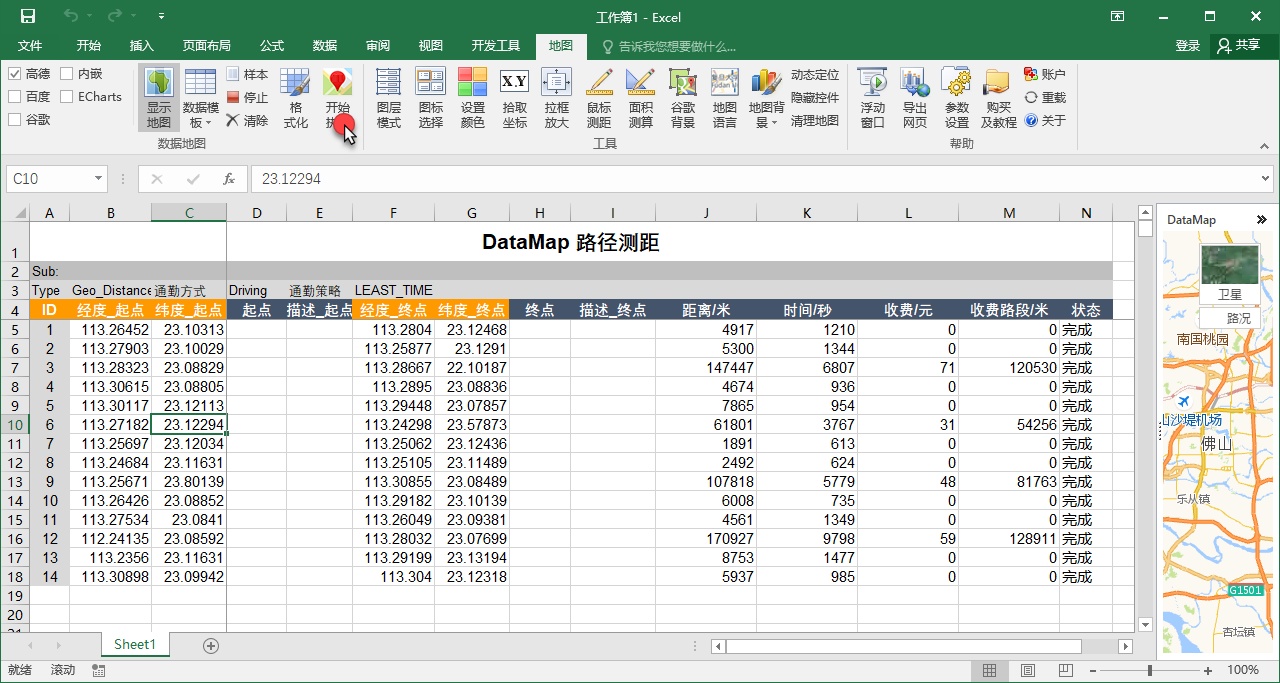
支持驾车,公交,步行,骑行等交通方式。
每种交通方式,有不同的选项,如驾车可选择最短时间/最少费用/最短距离/考虑交通状况。驾车和公交模式下,可以反馈收费路段信息。
测距由高德/百度地图WebService API提供,实时调用。
获取距离和行程时间,不需要展开地图栏,但追踪某条路径需要展开地图,在地图上绘制路径。
操作步骤
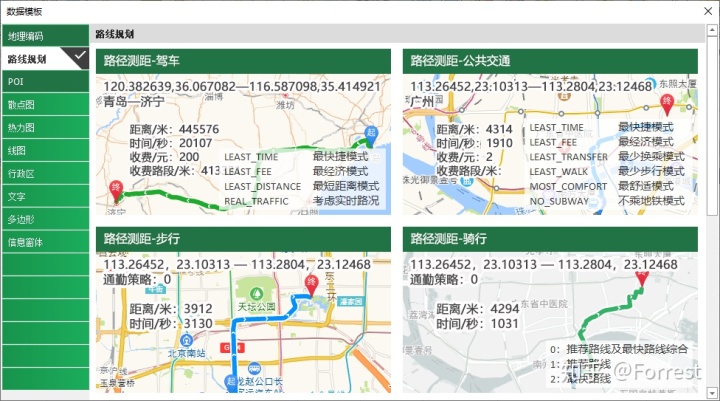
选择数据模板
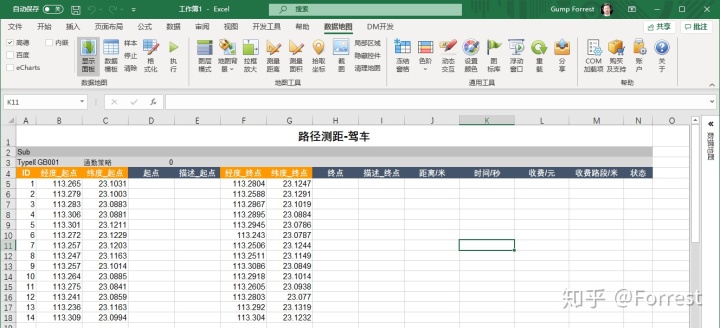
按照数据模板填好数据,D3单元格内容为通勤策略,参考文章后面的释义。
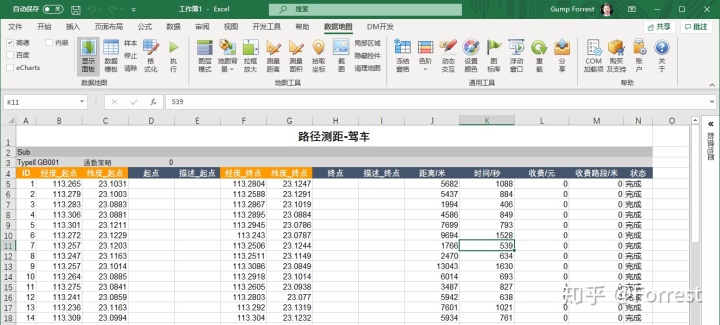
执行
通勤策略【路径规划-驾车 GB001/GB005】
- 0,速度优先,不考虑当时路况,此路线不一定距离最短
- 1,费用优先,不走收费路段,且耗时最少的路线
- 2,距离优先,不考虑路况,仅走距离最短的路线,但是可能存在穿越小路/小区的情况
- 3,速度优先,不走快速路,例如京通快速路(因为策略迭代,建议使用13)
- 4,躲避拥堵,但是可能会存在绕路的情况,耗时可能较长
- 5,多策略(同时使用速度优先、费用优先、距离优先三个策略计算路径)。
- 其中必须说明,就算使用三个策略算路,会根据路况不固定的返回一~三条路径规划信息。
- 6,速度优先,不走高速,但是不排除走其余收费路段
- 7,费用优先,不走高速且避免所有收费路段
- 8,躲避拥堵和收费,可能存在走高速的情况,并且考虑路况不走拥堵路线,但有可能存在绕路和时间较长
- 9,躲避拥堵和收费,不走高速
- 10,返回结果会躲避拥堵,路程较短,尽量缩短时间,与高德地图的默认策略也就是不进行任何勾选一致
- 11,返回三个结果包含:时间最短;距离最短;躲避拥堵 (由于有更优秀的算法,建议用10代替)
- 12,返回的结果考虑路况,尽量躲避拥堵而规划路径,与高德地图的“躲避拥堵”策略一致
- 13,返回的结果不走高速,与高德地图“不走高速”策略一致
- 14,返回的结果尽可能规划收费较低甚至免费的路径,与高德地图“避免收费”策略一致
- 15,返回的结果考虑路况,尽量躲避拥堵而规划路径,并且不走高速,与高德地图的“躲避拥堵&不走高速”策略一致
- 16,返回的结果尽量不走高速,并且尽量规划收费较低甚至免费的路径结果,与高德地图的“避免收费&不走高速”策略一致
- 17,返回路径规划结果会尽量的躲避拥堵,并且规划收费较低甚至免费的路径结果,与高德地图的“躲避拥堵&避免收费”策略一致
- 18,返回的结果尽量躲避拥堵,规划收费较低甚至免费的路径结果,并且尽量不走高速路,与高德地图的“避免拥堵&避免收费&不走高速”策略一致
- 19,返回的结果会优先选择高速路,与高德地图的“高速优先”策略一致
- 20,返回的结果会优先考虑高速路,并且会考虑路况躲避拥堵,与高德地图的“躲避拥堵&高速优先”策略一致
通勤策略【路径规划-公共交通 GB002】
支持市内公交换乘/跨城公交的起点城市。城市:城市名称/citycode
- 0:最快捷模式
- 1:最经济模式
- 2:最少换乘模式
- 3:最少步行模式
- 5:不乘地铁模式
通勤策略【路径规划-货车 GB007/GB008】
- 1,返回的结果考虑路况,尽量躲避拥堵而规划路径;对应导航SDK货导策略12;
- 2,返回的结果考虑路况,不走高速;对应导航SDK货导策略13;
- 3,返回的结果考虑路况,尽可能规划收费较低甚至免费的路径;对应导航SDK货导策略14;
- 4,返回的结果考虑路况,尽量躲避拥堵,并且不走高速;对应导航SDK货导策略15;
- 5,返回的结果考虑路况,尽量不走高速,并且尽量规划收费较低甚至免费的路径结果;对应导航SDK货导策略16;
- 6,返回的结果考虑路况,尽量的躲避拥堵,并且规划收费较低甚至免费的路径结果;对应导航SDK货导策略17;
- 7,返回的结果考虑路况,尽量躲避拥堵,规划收费较低甚至免费的路径结果,并且尽量不走高速路;对应导航SDK货导策略18;
- 8,返回的结果考虑路况,会优先选择高速路;对应导航SDK货导策略19;
- 9,返回的结果考虑路况,会优先考虑高速路,并且会考虑路况躲避拥堵;对应导航SDK货导策略20;
- 10,不考虑路况,返回速度优先的路线,此路线不一定距离最短;如果不需要路况干扰计算结果,推荐使用此策略;(导航SDK货导策略无对应,真实导航时均会考虑路况)
11,返回的结果会考虑路况,躲避拥堵,速度优先以及费用优先;500Km规划以内会返回多条结果,500Km以外会返回单条结果;考虑路况情况下的综合最优策略,推荐使用;对应导航SDK货导策略10;
通勤策略【路径规划-驾车 BB001】
- 0:默认
- 2:距离最短(只返回一条路线,不考虑限行和路况,距离最短且稳定,用于估价场景)
- 3:不走高速
- 4:高速优先
- 5:躲避拥堵
- 6:少收费
- 7: 躲避拥堵 & 高速优先
- 8: 躲避拥堵 & 不走高速
- 9: 躲避拥堵 & 少收费
- 10: 躲避拥堵 & 不走高速 & 少收费
- 11: 不走高速 & 少收费
- 12: 距离优先(考虑限行和路况,距离相对短且不一定稳定)
通勤策略【路径规划-同城公交 BB002】
- 0 推荐
- 1 少换乘
- 2 少步行
- 3 不坐地铁
- 4 时间短
- 5 地铁优先
通勤策略【路径规划-跨城公交 BB003/BB004/BB005】
- 0 时间短
- 1 出发早
- 2 价格低
查漏补缺
状态列中表示,数据反馈报错信息。
如果再次解析,如果发现J列已经返回距离数据信息,则自动跳过。
数据获取速度
从DM6.7.1开始,所有路径规划服务均采用webService方式调用。webService接口是有免费额度和并发控制的,参考后面的流量控制章节。
插件的并发控制,按高德/百度地图最低流量设定(个人,非认证开发者)。
数据校验
展开右侧地图栏,在插件主菜单点击【动态交互】,然后在当前sheet中点击某行数据,可以实时在地图上看到该行数据的路径规划情况,方便逐条校验数据。
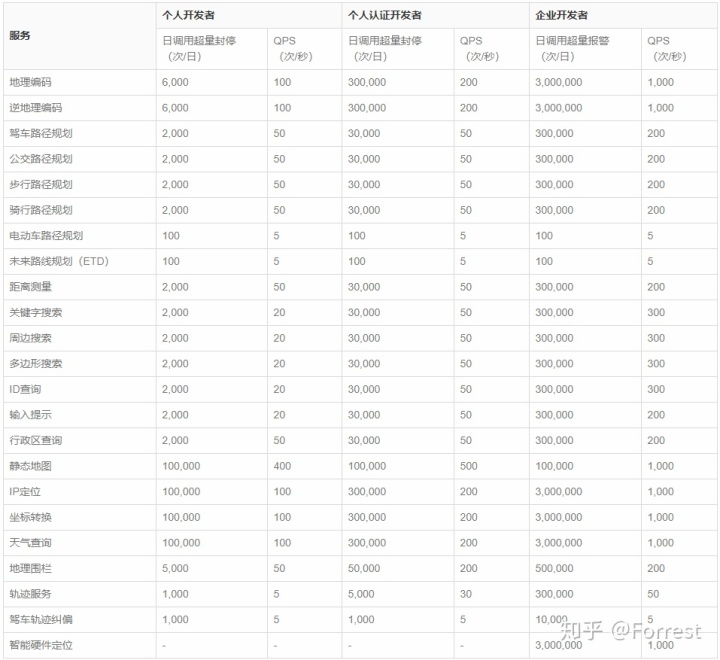
流量控制
高德地图WebService
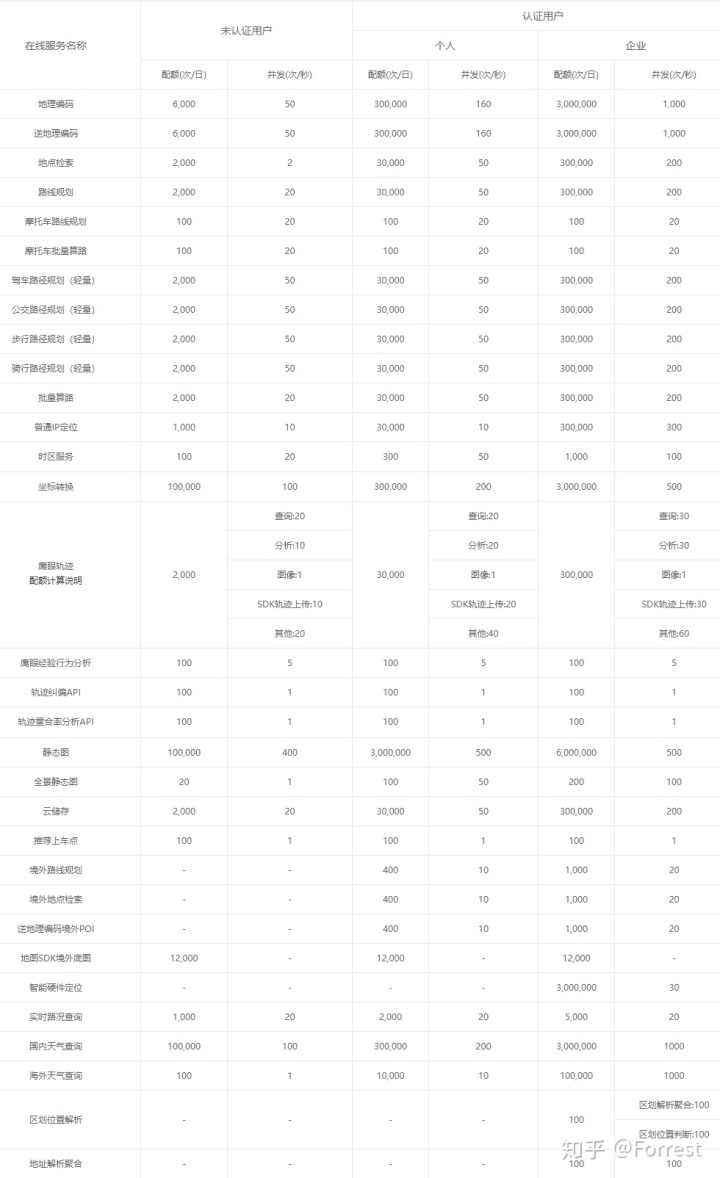
百度地图WebService


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









