







简介:本文介绍了一种结合编程和硬件设备的创新电子技术——数字电子时钟程序与旋转LED,旨在通过动态显示时间来提供新的视觉体验。文章详细阐述了程序的编程核心,包括使用C++、Python或Arduino等编程语言读取时间数据,并通过LED阵列展示时间。同时,也探讨了LED的驱动方式、亮度控制、闪烁抑制和电源管理等硬件设计要点。此外,本文还涉及了旋转LED效果的实现方法、微控制器和LED驱动电路的选择、电源的选择,以及如何通过编程环境编译和上传代码来完成整个电子时钟的构建。通过阅读本文,读者将能深入理解时间显示原理、微控制器的使用以及LED驱动技术。 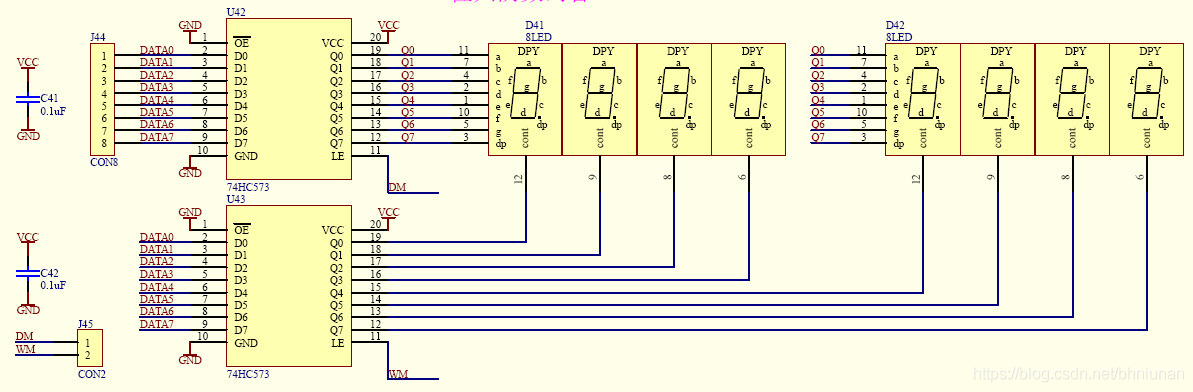
1. 数字电子时钟程序设计
在本章节,我们将探讨数字电子时钟程序设计的基础概念。数字时钟作为一种常见的电子设备,其核心在于程序设计,它能够精确地计算并显示时间。我们会介绍时间的基本概念,以及程序设计在实现时钟功能中的重要性。
理解时间与计时方法
时间是连续不断、不可逆的量,它为世界提供了一个参考框架。在数字电子时钟中,时间被抽象成一系列数字信号,以时、分、秒的方式进行量化。为了准确计算时间,我们需要理解计时方法,包括计时周期的设定、计时器的配置以及时间的进位机制。
设计程序的重要性
程序设计对于数字电子时钟至关重要,因为它负责处理时间的计算、显示逻辑和用户交互。一个优秀的程序设计应确保时钟运行准确无误,并具备良好的用户界面,以方便用户设置时间。设计时,我们还需考虑到程序的可扩展性、易维护性,以及潜在的优化空间,以提升用户体验。
数字电子时钟程序的设计涉及多种编程技巧和硬件知识,贯穿于整个设计流程。从本章开始,我们将逐步展开讨论,深入到LED显示、编程语言选择、系统时间处理,以及驱动方式和系统集成等关键主题。
2. LED显示时间实现
2.1 LED的基本工作原理与特性
2.1.1 LED的结构和功能
LED(Light Emitting Diode,发光二极管)是一种半导体组件,具有将电能直接转换为光能的特性。其核心部分为P型和N型半导体组成的PN结,当适当的正向偏压施加到PN结两端时,载流子(电子和空穴)在界面处重新结合,以光子的形式释放能量。LED的结构决定了其单向导电的特性,意味着电流只能单向流动,从而减少反向电流的干扰。
2.1.2 LED的电流电压特性
LED的电流-电压(I-V)特性与其结构相关,通常呈现非线性关系。当施加的电压低于其开启电压(约1.8V至3.3V,具体值取决于LED的材料类型)时,LED几乎不导电;而当电压超过开启电压后,电流会随电压的增加而迅速增长,使LED开始发光。因为LED对电流非常敏感,所以需要串联一个适当的限流电阻以防止过大的电流损坏LED。
graph TD
A[开启电压] --> B[限制电流]
B --> C[稳态工作区]
C --> D[LED亮度增加]
D --> E[过载区]
E --> F[损坏LED]
2.2 显示时间的硬件连接
2.2.1 LED与微控制器的连接方式
为了驱动LED显示时间,需要将LED与微控制器的GPIO(通用输入输出)引脚连接。为了保护微控制器和控制LED的亮度,通常会在二者之间加入限流电阻。在多LED显示的情况下,可以采用串接或并接的方式,但要注意电流限制和驱动能力。
2.2.2 多路复用技术在LED显示中的应用
在设计一个用于显示时间的LED显示屏时,考虑到I/O引脚的限制,通常会使用多路复用技术。这种技术通过快速切换显示各个LED的状态,以给人眼造成所有LED同时点亮的错觉。时间显示需要精确控制每个LED的亮灭周期,以实现正确的数字和段的显示。
flowchart LR
A[微控制器] -->|控制信号| B[驱动电路]
B -->|快速切换| C[LED阵列]
C --> D[显示数字]
2.2.3 代码块示例:单片机控制LED显示数字
为了控制LED显示特定数字(例如数字"8"),可以通过编程设置一组GPIO引脚的高低电平。以下是一个简单的伪代码示例:
// 伪代码:设置一组GPIO引脚来点亮LED形成数字"8"
void displayNumber8() {
// 假设 pins 数组中包含了控制每一位的引脚编号
int pins[] = {2, 3, 4, 5, 6, 7, 8, 9};
// 设置每个引脚为高电平以点亮对应的LED
for(int i = 0; i < 8; i++) {
digitalWrite(pins[i], HIGH);
}
}
在上述代码中, digitalWrite 函数用于控制指定引脚的电平状态。实际上,要实现复杂的显示逻辑(如数字的滚动显示等),还需要设计更复杂的驱动程序和电路。上述代码仅为展示基本的LED控制逻辑,实际应用中会涉及更多细节和优化。
3. 程序编程语言选择
程序编程语言是构建微控制器项目的基础,它不仅决定了开发的效率,还影响了系统的性能和可扩展性。在选择合适的编程语言时,需要考虑项目的具体需求、开发团队的经验以及语言的生态系统支持等因素。以下是针对C++、Python和Arduino平台的编程语言特点对比,以及程序开发环境的搭建方法。
3.1 编程语言的特点对比
不同的编程语言拥有各自的优势和局限性。在嵌入式系统开发中,选择正确的编程语言是至关重要的,它将影响到项目的整体质量和开发周期。
3.1.1 C++在微控制器编程中的优势
C++语言以其高性能和对系统级操作的强大支持,在微控制器编程领域中占据了重要地位。C++语言的主要特点包括:
- 类型安全 :C++提供了静态类型检查,能够帮助开发者在编译时发现错误,减少运行时错误。
- 面向对象编程 :面向对象的设计使得复杂系统的管理更加清晰和模块化,有助于代码的维护和重用。
- 性能优化 :C++允许开发者进行底层硬件操作,并进行细致的性能优化。
- 丰富的库支持 :开发者可以利用成熟的第三方库,提高开发效率。
在微控制器编程中,C++常用于需要高效执行和直接硬件操作的场景。例如,处理大量传感器数据或者管理低级的硬件资源。
3.1.2 Python的快速开发和灵活性
Python语言以其快速开发和简洁的语法而受到许多开发者的青睐。Python在微控制器编程中的优势如下:
- 简洁易学的语法 :Python的语法直观,能够快速上手,提高开发效率。
- 丰富的库资源 :Python社区提供了大量库,涵盖了数据分析、网络通信、图形用户界面等多个方面。
- 脚本化和可扩展性 :Python脚本可用于快速原型开发和小型项目,同时支持与C/C++等语言的交互,以获得更好的性能。
尽管Python在微控制器上的性能不及C++,但在小型项目或需要快速迭代的场景中,Python提供了极大的便利。
3.1.3 Arduino平台的易用性和社区支持
Arduino平台以其易用性而广受初学者和教育者的喜爱。它提供了一个简化的开发环境,具体特点包括:
- 简单易懂的开发环境 :Arduino IDE提供了简洁的接口和简化的编程模型,适合于入门级项目。
- 大量硬件兼容性 :Arduino与众多硬件模块兼容,易于扩展。
- 庞大的社区资源 :由于其广泛的用户基础,Arduino社区提供了大量的教程、库和项目案例。
Arduino平台适用于教学、原型设计和一些非复杂性的嵌入式项目。
3.2 程序开发环境搭建
选择好编程语言后,接下来是搭建适合的程序开发环境,这包括集成开发环境(IDE)的配置、程序库的安装以及工具链的选择。
3.2.1 集成开发环境(IDE)的配置
集成开发环境是开发者与代码互动的中心,一个好的IDE可以大大提高开发效率。根据不同的编程语言选择相应的IDE至关重要。例如:
- 对于C++ ,开发者可以选择Eclipse CDT、Code::Blocks或者Visual Studio等IDE。
- 对于Python ,推荐使用PyCharm、Anaconda或者IDLE。
- Arduino ,开发者通常使用Arduino IDE。
3.2.2 程序库和工具链的安装与配置
程序库提供了丰富的预设函数和类,能够简化开发流程。例如:
- C++标准库 提供了基本的数据结构和算法。
- Python标准库 包含文件操作、网络编程等功能。
- Arduino核心库 则提供了对微控制器硬件操作的支持。
工具链通常指的是编译器、链接器和构建工具。以GCC编译器为例,它被广泛用于C/C++语言的编译。在Python项目中,虽然不需要手动配置编译器,但必须确保Python解释器和相应的库已安装在系统上。
本章通过对比分析不同的编程语言和开发环境,为微控制器项目的实现提供了坚实的技术基础。开发者可以根据个人的技术背景和项目需求,选择最合适的语言和工具,开始他们的微控制器编程之旅。
4. 系统时间读取与数据处理
4.1 系统时钟的获取方法
在构建数字电子时钟的过程中,准确地获取当前时间是至关重要的。一般而言,有以下两种方法可以获取系统时间:使用外部的实时时钟模块(RTC)或者利用微控制器内部的时钟功能。它们各有特点,选择合适的方法取决于项目的具体需求。
4.1.1 实时时钟(RTC)模块的应用
实时时钟模块是一种具备独立的电池供电、能够保持时间准确性的模块,即便在主电源关闭的情况下也能维持时间运行。典型的RTC模块通过I2C或SPI等通信协议与微控制器进行数据交换。
使用RTC模块的优势:
- 持久性: 即便在外部电源失效时,RTC模块仍然能够独立工作,确保时钟不会停止。
- 准确性: RTC模块通常内置温度补偿晶振(TCXO)或其他高精度振荡器,可以保持较高的时间精度。
- 兼容性: 常见的RTC模块(如DS3231)拥有广泛的支持,可被多种微控制器直接读取。
在设计中,通过微控制器的I2C接口与RTC模块通信,按照模块提供的寄存器地址读取当前时间。例如:
// 伪代码,具体取决于所选微控制器和RTC模块型号
Wire.beginTransmission(RTC_ADDRESS);
Wire.write(HOURS_REGISTER);
Wire.endTransmission();
Wire.requestFrom(RTC_ADDRESS, 3); // 请求小时、分钟和秒的数据
hour = Wire.read();
minute = Wire.read();
second = Wire.read();
在上面的代码段中, Wire 是I2C通信的库函数, RTC_ADDRESS 是模块的I2C地址, HOURS_REGISTER 、 MINUTES_REGISTER 和 SECONDS_REGISTER 分别是时间数据的寄存器地址。
4.1.2 微控制器内部时钟的校准与同步
许多微控制器都内置了时钟源,如内部RC振荡器(RC Oscillator)。尽管这种内部时钟源的成本低且易于集成,但它们往往不够准确。因此,微控制器的内部时钟需要通过外部参考信号进行校准,如使用外部晶振。
校准微控制器内部时钟的步骤:
- 选择合适的晶振: 通常根据微控制器规格选择一个兼容的晶振。
- 配置时钟源: 在微控制器的时钟控制寄存器中配置时钟源,设置其为外部晶振模式。
- 校准: 根据晶振的频率调整微控制器内部的时钟校准寄存器,以确保时钟的准确性。
通过软件校准微控制器的时钟,虽然不如硬件RTC模块精确,但对于那些对时间精度要求不是特别严格的项目而言,内部时钟可以是一个经济有效的替代方案。
4.2 时间数据的格式化与显示
获取到准确的系统时钟数据后,下一步是将这些数据转化为人类可以理解的格式,并通过LED显示屏呈现出来。
4.2.1 时间数据的结构化表示
时间数据通常以小时、分钟和秒(HH:MM:SS)的格式进行表示。为了在LED上显示这些数据,需要对时间数据进行格式化处理。格式化的方法可以根据个人喜好或项目需求来设计,比如:
// 伪代码,用于将时间数据转换为字符串形式
String formatTime(int hour, int minute, int second) {
String timeStr = String(hour, DEC) + ":" + String(minute, DEC) + ":" + String(second, DEC);
return timeStr;
}
在上述代码中, String 是处理字符串的函数库, DEC 表示十进制格式,通过这种方式可以将整数类型的时间转换成人类可读的字符串格式。
4.2.2 时间显示逻辑的设计与实现
设计显示逻辑时,要考虑人眼对显示速度的适应性。太快的刷新率会导致LED过亮,而太慢则会让显示显得不连贯。通常,每秒至少刷新一次时间显示,以保证时钟的连续性。
时间显示流程示例:
- 初始化显示状态: 设置初始状态,比如清空LED显示缓冲区。
- 读取时间数据: 从RTC模块或微控制器内部时钟中获取时间。
- 格式化时间: 将时间数据转换成适合LED显示的格式。
- 输出时间到LED: 将格式化后的时间通过编程写入到LED显示屏。
- 循环显示: 持续执行上述步骤,以保证时钟的实时更新。
// 简单的伪代码显示时间的函数
void displayTime(int hour, int minute, int second) {
String timeStr = formatTime(hour, minute, second);
// 将格式化的时间字符串显示到LED屏上
ledMatrix.show(timeStr); // ledMatrix是假设的LED矩阵显示库
}
在实际应用中,LED显示逻辑可能还会涉及更复杂的动画效果、亮度调整等,以提高用户体验。因此,时间的显示逻辑设计应该根据最终产品的需求来细化和优化。
在下一章节中,我们将探讨如何通过多种技术提升LED显示的效率与效果。
5. LED驱动方式及效率提升
5.1 LED的驱动方式分析
5.1.1 静态驱动的特点与适用场景
静态驱动是最简单的LED驱动方式,它将LED直接连接到电源上,无需额外的驱动电路。这种驱动方式在LED数量少、电流较小的情况下非常适用。静态驱动的优点包括结构简单、成本低,以及响应速度快。然而,静态驱动也有其局限性,它不适用于大规模的LED阵列或者要求高亮度输出的场合,因为这会导致电源和功耗问题。
在静态驱动中,电流和电压必须根据LED的规格进行精确控制以避免损坏。由于LED是电流控制型器件,一旦电流超过其承受能力,会迅速导致LED亮度下降甚至烧毁。因此,在静态驱动设计中,通常会加入适当的限流电阻,以控制通过LED的电流。
5.1.2 动态驱动的优势与挑战
与静态驱动不同,动态驱动涉及在不同的时间间隔内,通过电路快速切换各个LED的状态。动态驱动通过控制LED的开关来实现多级亮度调节,而不改变流经LED的电流。这种方法有助于减少功耗,同时还能提供更加复杂和动态的显示效果。
动态驱动的优势在于能够有效控制电流,从而延长LED寿命和提高显示效率。然而,动态驱动技术也面临一些挑战,其中最主要的是电路设计的复杂度。动态驱动通常需要使用微控制器、驱动IC或专用的扫描电路来控制LED的开关,这增加了设计成本和时间。此外,当动态驱动用于大型LED阵列时,还需要考虑信号延迟和同步问题,以确保整个显示区域的均匀性和一致性。
5.1.3 动态驱动的电路实现示例
动态驱动可以通过简单的电阻-晶体管开关电路实现。以下是一个使用晶体管来控制LED开关的基本电路示例:
flowchart LR
A[微控制器] -->|控制信号| B[晶体管开关]
B -->|电流| C[LED]
D[电源] -->|电压| B
在这个示例中,微控制器通过输出控制信号来打开或关闭晶体管开关。当晶体管导通时,LED点亮;当晶体管关闭时,LED熄灭。通过调整控制信号的频率和占空比,可以实现对LED亮度的动态控制。
5.2 提升显示效率的技术
5.2.1 亮度控制的策略与实现
亮度控制是LED显示中一个重要的功能,它不仅关系到显示效果,还影响到功耗和LED的使用寿命。亮度控制可以通过改变流经LED的电流来实现,也可以通过脉冲宽度调制(PWM)技术来实现。PWM技术通过快速地开关LED,并调整开关的持续时间来控制LED的平均亮度,而不改变流过LED的电流大小。
PWM控制LED亮度的伪代码如下所示:
void setup() {
pinMode(LED_BUILTIN, OUTPUT); // 设置LED引脚为输出模式
}
void loop() {
for (int i = 0; i < 255; i++) {
analogWrite(LED_BUILTIN, i); // 通过PWM调整亮度
delay(10); // 延时以减慢亮度变化速度
}
}
在这个示例中, analogWrite 函数用于生成PWM信号,并通过 i 的值改变占空比,从而控制LED的亮度。
5.2.2 闪烁抑制的算法与应用
由于LED在动态驱动中经常进行快速切换,这可能会引起视觉上的闪烁,特别是在低频率下。为了抑制闪烁,可以使用快速的刷新率和适当的信号处理算法。这些算法包括过采样技术和动态模糊处理,能够使LED的闪烁不那么明显。
5.2.3 电源管理技术对功耗的影响
电源管理技术是控制电子设备功耗的关键。在LED显示系统中,电源管理技术能够通过优化电压和电流来减少功耗。例如,使用高效的DC-DC转换器可以提高电源转换效率,并减少能量损耗。此外,通过在系统中集成电源管理IC,可以实现对各个组件的精准电源供应,进一步优化整体功耗。
电源管理的关键在于智能调节电源的输出,使之与负载需求相匹配。这可以通过微控制器中的软件算法来实现,比如根据当前显示状态动态调节电源电压和电流。这种方法不仅可以减小功耗,还能延长LED的使用寿命。
5.3 LED驱动效率的测量与优化
5.3.1 测量方法
LED驱动效率的测量通常涉及到测量输入的功率和输出的光功率。通过计算输入功率和输出光功率的比率,可以得到LED的驱动效率。这要求精确测量电源电压和电流,以及LED发出的光的强度。
5.3.2 优化策略
一旦测量出LED驱动效率,就可以采取多种策略来进一步优化。优化策略包括: - 调整电源电压,确保在满足亮度要求的同时,电流尽可能低; - 使用高效率的驱动电路,如使用高效率的直流转换器和驱动IC; - 对电路布局进行优化,减少线路电阻和分布电容,降低损耗; - 利用热管理系统,如散热片和风扇,以保持在较佳工作温度范围内,防止过热导致效率下降。
通过这些优化策略,可以显著提升LED显示系统的整体效率和性能。
6. 旋转LED效果与系统集成
在设计与实现一个数字电子时钟程序时,旋转LED效果可以显著提升视觉吸引力和用户体验。而系统集成阶段是整个项目开发中的关键环节,它涉及到软硬件的协同工作以及最终代码的实现与部署。
6.1 旋转LED效果的设计与实现
旋转LED效果通常通过编程在LED阵列上创建一个动态旋转的视觉效果。这种效果的实现需要结合硬件和软件的设计。
6.1.1 旋转动画的算法逻辑
实现旋转动画,我们需要编写一个算法来控制LED阵列中哪些LED被点亮以及它们点亮的顺序。通常,这种效果通过周期性地刷新LED阵列来实现,通过改变点亮LED的位置来形成旋转的视觉效果。以下是一个简单的示例代码,展示了如何在8x8 LED矩阵上实现旋转LED效果:
// 假设有一个8x8的LED矩阵,这里用二维数组表示每个LED的状态(0表示关闭,1表示开启)
int ledMatrix[8][8] = {0};
void rotateLedMatrix(int angle) {
// angle表示旋转的角度,每次调用函数后LED矩阵旋转一定角度
// 这里简化算法,实际上需要根据旋转角度进行坐标变换
// ...
}
// 主循环中调用旋转函数
while (1) {
rotateLedMatrix(30); // 每次旋转30度
displayLedMatrix(ledMatrix); // 显示当前LED矩阵的状态
delay(100); // 延时100ms,控制旋转速度
}
6.1.2 硬件与软件的协同优化
硬件设计必须能够支撑所需的软件算法,同时软件算法也要充分利用硬件的潜力。在我们的旋转LED效果中,硬件需要能够快速刷新LED矩阵,而软件需要高效地计算并更新矩阵的状态。
6.2 微控制器与LED驱动电路设计
微控制器的选择和接口设计对于实现LED显示至关重要。同时,合理的驱动电路设计能够保证LED正常工作并且提高能效。
6.2.1 微控制器的选择与接口设计
在选择微控制器时,要考虑到其I/O口的数量、处理能力、内存容量以及是否具备PWM功能等。例如,Arduino系列的微控制器因其易用性和丰富的库支持成为许多项目的首选。
6.2.2 驱动电路的搭建与调试
驱动电路需要根据LED的电气特性来设计,如选择合适的限流电阻以及晶体管来驱动LED阵列。调试过程中,需要确保电路稳定且无过热现象。
6.3 代码编译与上传流程
代码编写完成后,编译和上传是最终将程序部署到硬件上的重要步骤。
6.3.1 程序编译环境与工具链
为了编译代码,通常需要安装一个编译器或集成开发环境(IDE),如Arduino IDE。工具链包括编译器、链接器以及上传工具。
6.3.2 代码的编译与调试
编译过程中,需要确保代码无语法错误并且所有依赖项都已正确配置。调试时,可以通过串口监视器查看程序运行情况和潜在的错误。
6.3.3 上传与验证程序的实际效果
代码编译成功后,使用USB接口或其他通信接口将程序上传到微控制器。之后,通过实际运行来验证程序的效果是否符合预期。
6.4 电路图与源代码解析
电路图是硬件设计的蓝图,而源代码则是软件实现的细节。这两者对于理解整个系统的运作至关重要。
6.4.1 电路图的阅读与理解
理解电路图需要知道每个组件的符号表示以及它们是如何连接的。对于复杂的电路,电路图中可能还会包含特定的注释和文字说明。
6.4.2 源代码的结构与关键功能分析
分析源代码时,要关注程序的整体结构、函数的定义和调用流程,以及如何处理输入输出等。下面是旋转LED程序的关键部分代码解析:
// 假设程序中定义了一个函数用于设置特定LED的状态
void setLedState(int x, int y, int state) {
// 此函数根据x和y坐标设置LED状态为开或关
// ...
}
// 在主程序中调用函数来控制LED
for (int y = 0; y < 8; y++) {
for (int x = 0; x < 8; x++) {
setLedState(x, y, 1); // 点亮某个LED
delay(5); // 等待一段时间
setLedState(x, y, 0); // 关闭LED
}
}
通过细致的分析和理解电路图与源代码,可以更准确地对系统进行故障诊断和优化改进。
简介:本文介绍了一种结合编程和硬件设备的创新电子技术——数字电子时钟程序与旋转LED,旨在通过动态显示时间来提供新的视觉体验。文章详细阐述了程序的编程核心,包括使用C++、Python或Arduino等编程语言读取时间数据,并通过LED阵列展示时间。同时,也探讨了LED的驱动方式、亮度控制、闪烁抑制和电源管理等硬件设计要点。此外,本文还涉及了旋转LED效果的实现方法、微控制器和LED驱动电路的选择、电源的选择,以及如何通过编程环境编译和上传代码来完成整个电子时钟的构建。通过阅读本文,读者将能深入理解时间显示原理、微控制器的使用以及LED驱动技术。

















 1729
1729

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









