







基本原理
须满足条件:抑制噪声;精确定位边缘。
从数学上表达了三个准则[信噪比准则(低错误率)、定位精度准则、单边缘响应准则],并寻找表达式的最佳解。
属于先平滑后求导的方法。
算法基本步骤
1、使用高斯滤波平滑图像
令f(x,y)表示数据(输入源数据),G(x,y)表示二维高斯函数(卷积操作数),fs(x,y)
Guess过程
用坐标点(x,y)表示一个3×3的邻域,设中心点的坐标为(0,0)中,得到一个权重矩阵,归一化权重矩阵(矩阵中各个点除以权重之和),得到标准的权重矩阵,即高斯模板。
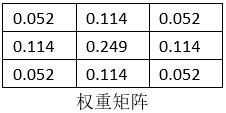
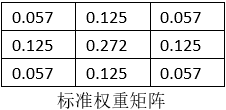
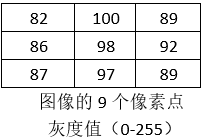
计算高斯模糊。设在一幅图像中的3×3区域内,用各像素点的灰度值乘以对应点的权重。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 6637
6637











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









