







写在前面
- 在现实中,一个常见的情境是工程师或者初步接触控制算法设计的同学们看见某控制算法在特定应用领域取得了惊艳的效果后,于是倍加推崇。往往会直接套用到自己的问题中,经过一番折腾,发现效果并不理想,甚至还不如PID好,于是又回到控制理论无用论和PID万能论中去。这其中的原因在于工程师或初学者通常并不理解每种控制算法背后的基本假设和所要解决的一类数学问题,导致了控制算法泛化的风险;比如自抗扰控制ADRC在运动控制领域(被控对象通常满足串联积分标准型的假设,二阶系统)取得了成功,但对于过程控制(大死区、多回路耦合、复杂非线性等因素)却未必适合或者能够直接套用。
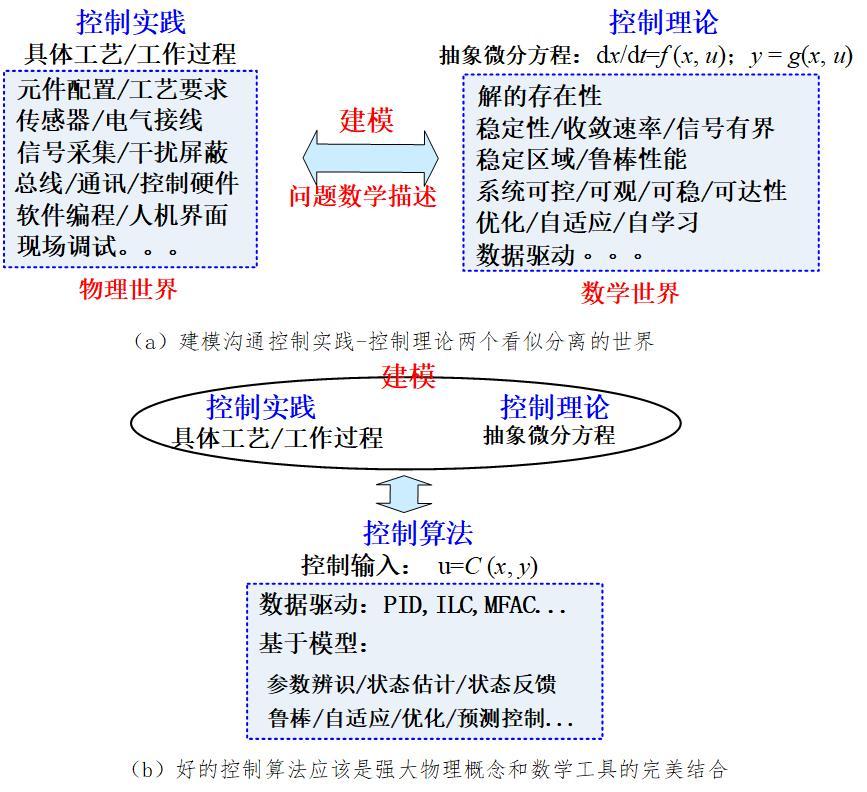
- 控制实践和控制理论的脱节,除了理论研究和实践的导向不同,作者认为一个很重要的原因在于缺少沟通语言,即缺少对现实被控系统的数学描述(也即模型)。如图1(a)所示,一方面,控制理论研究者们直接从数学式子(一般为微分方程)出发,通过数学推导和证明,给出数学上的系统性质(如稳定域、可观可控等)以及理论上的控制率,缺少对数学式子如何得来、式子能在能在多少程度上描述现实系统,式子中每一个数学变量如何与现实被控系统中的物理量相关联、这些数学变量是否可以实时准确获知、运算这些式子的所需要的计算资源等现实因素的关注;另一方面,工程师面对的是一个个具体的被控系统(完成特定工作/工艺过程),需要处理工艺逻辑、信号采集/处理、硬件配置、软件编程实现等问题,且面临着现场调试压力,自然无暇也无力深入思考自己的被控系统到底如何用数学语言描述,本质归类为哪一类问题诸如此类的话题了。
- 控制实践和控制理论之间缺少可以沟通的语言,使得一方面现实中亟待解决的控制难题高度依赖PID调试经验和手动干预,无法实现良好的自动化,更不用说数字化和智能化了;另一方面,大量在数学上证明严谨、优美的控制理论,却不能根据实际情况有效改进,从而在工业界有效落地推广。建模作为建立这一沟通渠道的有效方法,却面临着失语的境地,使作者深感遗憾。
- 即使对于想要摆脱模型依赖的数据驱动控制算法来说,如果要在现实被控系统真正落地应用,建立合乎需要的数学描述(不要求精确,但应该能大概描述出系统主要动态特性)仍是必要的,这有助于控制算法的设计和调试,避免不必要的试错时间和成本。比如对于PID控制器(本质为数据驱动控制器
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









