







简介:本项目基于STM32F103C8T6微控制器,详细讲解了如何实现CAN总线通信。涉及CAN总线基础知识、配置步骤、过滤器设置、报文发送与接收、回环测试及LED反馈。通过使用Keil uVision4开发环境,实现了嵌入式系统中CAN通信协议的完整应用。 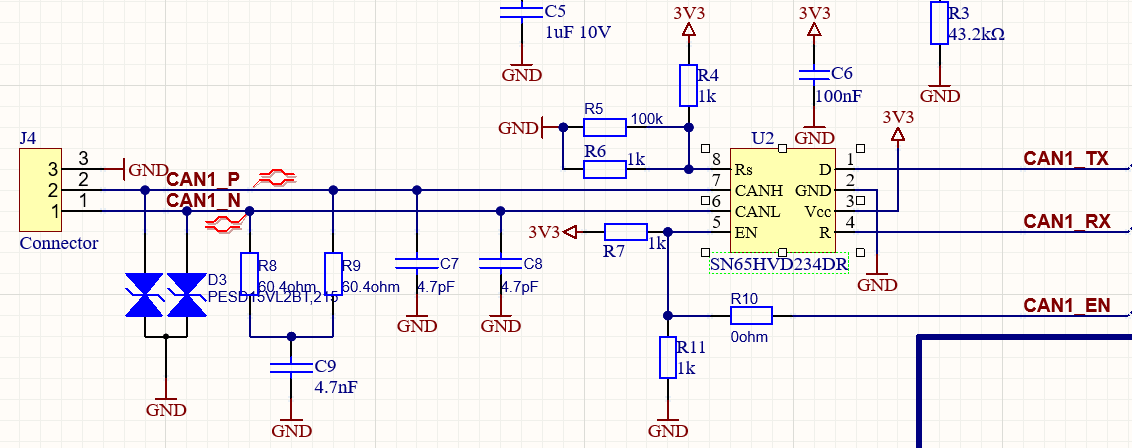
1. STM32F103C8T6微控制器介绍
1.1 STM32F103C8T6概述
STM32F103C8T6是STMicroelectronics(意法半导体)生产的一款高性能的32位ARM Cortex-M3微控制器(MCU),广泛应用于各种嵌入式系统中。凭借其丰富的功能和灵活的配置,这款MCU成为了工业控制、医疗设备、消费类电子产品以及汽车电子等领域的热门选择。其封装小巧,运行速度快,而且具有多种通信接口,使设计者能够轻松实现复杂的应用。
1.2 架构与性能特点
这款微控制器拥有64 KB的闪存和20 KB的静态随机存取存储器(SRAM),以及多达112个通用输入输出端口(GPIO),足以应对多样化的应用场景。其核心是ARM的Cortex-M3处理器,这个处理器拥有优秀的中断管理能力和出色的计算性能。STM32F103C8T6的性能特点还包括支持多种通信协议,比如CAN(Controller Area Network)、I2C、SPI等,这在多节点通信场景中显得尤为重要。
1.3 在CAN总线通信中的应用
由于其内部集成了CAN总线控制器,STM32F103C8T6非常适合于实时控制应用。CAN总线是一种国际标准的车辆局域网通讯协议,它以一种健壮、高可靠性的通讯方式在各种工业和消费电子环境中被广泛应用。这种通信方式特别适用于复杂或恶劣的电磁环境,它能在低至1Mbit/s的速度下进行可靠的数据传输。因此,STM32F103C8T6在汽车电子、工业自动化以及机器人技术等需要强健通讯协议的场合中脱颖而出。在接下来的章节中,我们将详细探讨如何配置和优化STM32F103C8T6的CAN总线通信功能。
2. CAN总线基础知识与配置
2.1 CAN总线概述
2.1.1 CAN总线的起源和标准
控制器局域网络(Controller Area Network,简称CAN)是一种广泛应用于汽车和工业领域的串行通讯总线技术。它最初由德国Bosch公司在1980年代初期为汽车内部通讯而开发,目的是为了减少汽车内部的线束数量,并提供一种高可靠性的通讯方式。后来,随着其可靠性和高效性的优点逐渐被认可,CAN总线的应用领域扩展到工业自动化、医疗设备、航空航天等多个领域。
CAN总线符合ISO 11898和ISO 11519标准,并具有多种衍生标准,如CANopen和DeviceNet等。它支持多主模式,使用非破坏性仲裁机制来解决总线访问冲突问题。CAN总线在物理层上既可以采用高速标准(最高1Mbps),也可以采用低速容错标准(最高125Kbps),根据不同的应用场景需求。
2.1.2 CAN总线的工作原理和优势
CAN总线使用差分信号传输数据,它将数据打包成帧(frame)进行发送。帧包括仲裁场、控制场、数据场、校验场等部分,其中仲裁场决定了总线上的优先级。当多个节点尝试同时发送数据时,优先级低的节点会自动退出仲裁,从而避免了数据碰撞。
CAN总线的优势在于其高可靠性和容错能力。它采用非破坏性的仲裁方法,确保了数据传输的实时性和优先级的合理性。此外,CAN总线还具有较好的抗干扰能力,且可以通过中继器进行网络扩展。由于其开放性和兼容性,CAN总线已经成为工业领域事实上的标准通信总线之一。
2.2 STM32F103C8T6的CAN总线配置
2.2.1 硬件连接方式和接口选择
STM32F103C8T6微控制器支持CAN通信,其内部集成有CAN控制器和CAN收发器。在进行CAN总线配置前,硬件连接方式至关重要。通常,硬件连接包括CAN收发器和物理总线的连接。推荐使用如PCA82C250或TJA1050等CAN收发器,因为它们提供了差分信号传输和网络保护功能。
在接口选择上,通常使用MCU的PB8和PB9引脚分别作为CAN接口的RX和TX引脚。在电路设计时,必须确保收发器的参考地与微控制器的参考地相连,以保证信号的一致性和可靠性。
2.2.2 软件配置要点和配置文件设置
软件配置是实现STM32F103C8T6 CAN总线通信的关键。首先,需要在STM32的硬件抽象层(HAL)中启用CAN时钟。接着,初始化CAN配置结构体,其中包括波特率设置、时间触发通信(TTCM)的启用、自动离线管理的配置等参数。此外,还需要配置过滤器,以便正确接收期望的消息ID。
在代码中,这些配置通常通过HAL库函数或底层寄存器直接操作来完成。例如,使用 HAL_CAN_Init() 函数来初始化CAN模块,并通过 CAN_FilterTypeDef 结构体来设置过滤器参数。
// CAN初始化配置示例代码
CAN_FilterTypeDef sFilterConfig;
sFilterConfig.FilterBank = 0; // 设置过滤器编号
sFilterConfig.FilterMode = CAN_FILTERMODE_IDMASK; // 设置过滤器模式为掩码模式
sFilterConfig.FilterScale = CAN_FILTERSCALE_32BIT; // 设置过滤器尺寸为32位
sFilterConfig.FilterIdHigh = 0x0000; // 设置过滤器ID高位
sFilterConfig.FilterIdLow = 0x0000; // 设置过滤器ID低位
sFilterConfig.FilterMaskIdHigh = 0x0000; // 设置掩码ID高位
sFilterConfig.FilterMaskIdLow = 0x0000; // 设置掩码ID低位
sFilterConfig.FilterFIFOAssignment = CAN_RX_FIFO0; // 设置接收FIFO
sFilterConfig.FilterActivation = ENABLE; // 激活过滤器
sFilterConfig.SlaveStartFilterBank = 14; // 设置过滤器开始编号
HAL_CAN_ConfigFilter(&hcan, &sFilterConfig); // 应用过滤器配置
HAL_CAN_Start(&hcan); // 启动CAN模块
HAL_CAN_ActivateNotification(&hcan, CAN_IT_RX_FIFO0_MSG_PENDING); // 激活接收FIFO0消息挂起中断
在上述代码中,我们定义了CAN过滤器结构体 sFilterConfig ,并为其指定了多个参数。这些参数决定了哪些CAN消息能够通过过滤器被接收。最后,我们通过调用 HAL_CAN_ConfigFilter() 函数应用这些过滤器配置,并启动CAN模块。接下来,通过中断服务函数来处理接收到的消息。
// CAN接收中断服务函数
void HAL_CAN_RxFifo0MsgPendingCallback(CAN_HandleTypeDef *hcan)
{
CAN_RxHeaderTypeDef rxHeader;
uint8_t rxData[8];
// 接收数据帧
if(HAL_CAN_GetRxMessage(hcan, CAN_RX_FIFO0, &rxHeader, rxData) == HAL_OK)
{
// 处理接收到的数据...
}
}
在 HAL_CAN_RxFifo0MsgPendingCallback 函数中,我们使用 HAL_CAN_GetRxMessage() 函数来从FIFO0中获取接收到的数据帧,并将其存储在相应的变量中。
在软件配置过程中,需要特别注意时钟配置的准确性,因为CAN模块对时钟信号的稳定性和精确性有着严格的要求。此外,对于不同应用环境,可能还需要对CAN总线的终端电阻进行配置,以避免反射波问题。
总的来说,STM32F103C8T6的CAN总线配置需要精细的硬件连接设计和准确的软件参数设置,以保证数据传输的稳定性和可靠性。通过以上步骤,您将能有效地将STM32F103C8T6微控制器集成进CAN总线系统中,并进行有效的数据通讯。
3. GPIO初始化与CAN时钟配置
在STM32微控制器的开发过程中,对GPIO(通用输入输出)引脚进行正确配置是基础且关键的一步,它将直接影响到微控制器与外部设备的交互能力。同时,CAN模块的时钟配置也是确保通信可靠性的核心步骤。本章将对这两个重要环节进行深入的探讨。
3.1 GPIO引脚的配置与初始化
3.1.1 配置GPIO模式和速率
STM32F103C8T6微控制器拥有丰富的GPIO引脚,它们可以配置成不同的模式,以满足各种应用场景的需求。常见的GPIO模式包括推挽输出、开漏输出、输入浮空、输入上拉/下拉以及模拟模式等。
为了展示如何配置GPIO,我们可以参考以下代码块:
#include "stm32f10x.h"
void GPIO_Configuration(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
// 使能GPIOB时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
// 配置GPIOB的第0号引脚为推挽输出模式,最大输出速率为50MHz
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
}
在该代码段中, GPIO_InitTypeDef 结构体用于设置GPIO的配置参数,其中包括了 GPIO_Pin 来选择特定的引脚、 GPIO_Mode 来设置工作模式以及 GPIO_Speed 来设置输出速率。 RCC_APB2PeriphClockCmd 函数则用于使能对应GPIO端口的时钟。
3.1.2 实现GPIO引脚的输入输出控制
在微控制器与外设进行通信时,需要对GPIO引脚进行输入和输出控制。在STM32中,可以通过 GPIO_SetBits() 和 GPIO_ResetBits() 函数来控制引脚输出高电平或低电平。
// 设置GPIOB第0号引脚输出高电平
GPIO_SetBits(GPIOB, GPIO_Pin_0);
// 设置GPIOB第0号引脚输出低电平
GPIO_ResetBits(GPIOB, GPIO_Pin_0);
对于输入操作,我们可以读取GPIO引脚的状态:
// 检查GPIOB第0号引脚的状态
if(GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_0) == Bit_SET)
{
// 执行对应操作
}
3.2 CAN模块的时钟配置
3.2.1 时钟源的选择和时钟树配置
STM32F103C8T6的CAN模块需要一个稳定的时钟源以确保通信的准确性。通常,我们会将外部高速时钟(HSE)作为CAN的时钟源,然后通过内部的相位锁定环(PLL)进行倍频,以提供给CAN模块所需的时钟频率。
时钟树配置通常在 RCC 配置中完成,下面是配置时钟树的代码示例:
void RCC_Configuration(void)
{
// 使能外部高速时钟(HSE)
RCC_HSEConfig(RCC_HSE_ON);
// 等待外部高速时钟就绪
while(RCC_GetFlagStatus(RCC_FLAG_HSERDY) == RESET);
// 配置PLL,输入时钟为HSE,倍频因子为9,得到72MHz的主时钟
RCC_PLLConfig(RCC_PLLSource_HSE_Div1, RCC_PLLMul_9);
// 启用PLL
RCC_PLLCmd(ENABLE);
// 等待PLL就绪
while(RCC_GetFlagStatus(RCC_FLAG_PLLRDY) == RESET);
// 设置PLL为系统时钟源,并倍频得到最终的系统时钟
RCC_SYSCLKConfig(RCC_SYSCLKSource_PLLCLK);
// 等待PLL被选为系统时钟源
while(RCC_GetSYSCLKSource() != 0x08);
}
3.2.2 确保CAN模块时钟的稳定性和精确性
为确保CAN模块时钟的稳定性和精确性,除了正确配置时钟源和时钟树之外,还需要进行时钟输出的调整,比如使用微调寄存器(PSC)和时间基准寄存器(BTR),以满足不同CAN协议的时序要求。
void CAN_Configuration(void)
{
CAN_InitTypeDef CAN_InitStructure;
CAN_FilterInitTypeDef CAN_FilterInitStructure;
// 使能CAN1时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_CAN1, ENABLE);
// 配置CAN工作在模式1,时间基准寄存器BTR
CAN_InitStructure.CAN_TTCM = DISABLE;
CAN_InitStructure.CAN_ABOM = DISABLE;
CAN_InitStructure.CAN_AWUM = DISABLE;
CAN_InitStructure.CAN_NART = DISABLE;
CAN_InitStructure.CAN_RFLM = DISABLE;
CAN_InitStructure.CAN_TXFP = DISABLE;
CAN_InitStructure.CAN_Mode = CAN_Mode_Normal;
CAN_InitStructure.CAN_SJW = CAN_SJW_1tq;
CAN_InitStructure.CAN_BS1 = CAN_BS1_4tq;
CAN_InitStructure.CAN_BS2 = CAN_BS2_3tq;
CAN_InitStructure.CAN_Prescaler = 4; // 预分频器值
CAN_Init(CAN1, &CAN_InitStructure);
// ...后续的过滤器配置等步骤...
}
在上述代码中,我们通过设置 CAN_InitStructure 结构体的各个成员变量来定义CAN的工作模式和时序参数。注意,时钟的精确配置是保证CAN通信质量的关键。需要根据实际通信速率和线路延迟等因素精确计算 CAN_Prescaler 的值。
在本章中,我们通过代码和参数配置深入探讨了STM32F103C8T6中GPIO的初始化过程与CAN模块时钟的配置。下一章将介绍如何进行CAN初始化与过滤器设置,这是实现高效CAN通信的关键步骤。
4. CAN初始化与过滤器设置
4.1 CAN模块的初始化过程
在构建基于STM32F103C8T6的CAN通信系统时,对CAN模块进行正确的初始化是至关重要的。初始化过程涉及到多个参数的配置,包括波特率的设置、工作模式的选择以及错误处理机制的配置等。
4.1.1 根据需求设置波特率
在初始化CAN模块时,首先要根据系统需求设置合适的波特率。波特率决定了数据传输的速度,它必须在所有通信节点之间保持一致。例如,若设计需求允许的通信距离较长,可以选择较低的波特率以确保信号完整性;相反,如果对数据传输速率有较高要求,则应选择较高的波特率。
以下是设置波特率的代码示例:
CAN_InitTypeDef CAN_InitStructure;
CAN_FilterInitTypeDef CAN_FilterInitStructure;
uint32_t baudrate = 500000; // 设置波特率为500kbps
CAN_DeInit(CAN1);
CAN_InitStructure.CAN_TTCM = DISABLE;
CAN_InitStructure.CAN_ABOM = DISABLE;
CAN_InitStructure.CAN_AWUM = DISABLE;
CAN_InitStructure.CAN_NART = DISABLE;
CAN_InitStructure.CAN_RFLM = DISABLE;
CAN_InitStructure.CAN_TXFP = DISABLE;
CAN_InitStructure.CAN_Mode = CAN_Mode_Normal;
CAN_InitStructure.CAN_SJW = CAN_SJW_1tq;
CAN_InitStructure.CAN_BS1 = CAN_BS1_4tq;
CAN_InitStructure.CAN_BS2 = CAN_BS2_3tq;
CAN_InitStructure.CAN_Prescaler = (uint16_t) (SystemCoreClock / baudrate);
CAN_Init(CAN1, &CAN_InitStructure);
在上述代码中, CAN_InitStructure 结构体用于存储CAN模块的配置信息。 CAN_Prescaler 设置了分频值,这个值与系统时钟相除即得到CAN模块的时钟频率,进一步决定了波特率的大小。
4.1.2 管理模式和工作状态的配置
除了波特率外,CAN模块的工作模式和状态管理也是初始化过程中需要关注的。STM32F103C8T6的CAN模块支持正常模式和三种错误界定模式(静默模式、回环模式和监听模式)。
CAN_InitStructure.CAN_Mode = CAN_Mode_Normal;
上述代码行将CAN模块设置为正常工作模式。在此模式下,CAN模块可以正常接收和发送消息。如果需要进入不同的错误界定模式,可以更改 CAN_Mode 的值。
// 示例:将CAN设置为回环模式
CAN_InitStructure.CAN_Mode = CAN_Mode_LoopBack;
在回环模式下,CAN模块接收的任何消息都会被送回自身发送端,这样可以用于测试而不影响外部CAN网络。
4.2 CAN过滤器的配置与应用
4.2.1 理解CAN消息ID和过滤器原理
CAN消息过滤器是管理CAN总线消息流的关键组件。它允许用户根据消息ID或者ID范围接收特定的消息。CAN消息ID是一个11位(标准帧)或者29位(扩展帧)的标识符,用来唯一标识消息。过滤器可以识别消息ID并决定是否接收或丢弃该消息。
过滤器的工作原理如下:
- 标准帧 :过滤器使用11位ID,比较器会与过滤器寄存器中设置的ID值进行比较,如果相匹配,则接收该消息。
- 扩展帧 :过滤器可使用29位ID,也可以与标准帧的ID一起工作。
4.2.2 配置过滤器掩码和设置过滤器模式
为了实现过滤功能,需要正确配置过滤器掩码和过滤器寄存器。过滤器掩码用于设置哪些位需要比较,哪些位可以忽略。
CAN_FilterInitStructure.CAN_FilterNumber = 0;
CAN_FilterInitStructure.CAN_FilterMode = CAN_FilterMode_IdMask;
CAN_FilterInitStructure.CAN_FilterScale = CAN_FilterScale_32bit;
CAN_FilterInitStructure.CAN_FilterIdHigh = 0x0000;
CAN_FilterInitStructure.CAN_FilterIdLow = 0x0000;
CAN_FilterInitStructure.CAN_FilterMaskIdHigh = 0x0000;
CAN_FilterInitStructure.CAN_FilterMaskIdLow = 0x0000;
CAN_FilterInitStructure.CAN_FilterFIFOAssignment = CAN_Filter_FIFO0;
CAN_FilterInitStructure.CAN_FilterActivation = ENABLE;
CAN_FilterInit(&CAN_FilterInitStructure);
在上述代码中,我们配置了过滤器0的工作模式为ID掩码模式( CAN_FilterMode_IdMask ),使用32位范围( CAN_FilterScale_32bit )。 CAN_FilterIdHigh 和 CAN_FilterIdLow 设置了过滤器识别的消息ID,而 CAN_FilterMaskIdHigh 和 CAN_FilterMaskIdLow 设置了过滤器掩码。在此配置下,只有ID完全匹配过滤器设置的ID才会被接收。
过滤器的配置完成后,如果需要更改过滤器的掩码或者ID,只需要修改 CAN_FilterInitStructure 的相关字段,并重新调用 CAN_FilterInit 函数即可。
graph TD;
A[CAN消息到达] --> B[过滤器0]
B -->|ID匹配| C[接收消息]
B -->|ID不匹配| D[丢弃消息]
C --> E[交给FIFO0]
D --> F[继续监听]
通过上述的初始化和过滤器配置,我们能够实现对CAN总线消息的精确控制和管理。这不仅提高了通信的可靠性,还增强了系统的稳定性和灵活性。在接下来的章节中,我们将讨论如何使STM32F103C8T6微控制器进入正常工作模式,并详细探讨如何发送和接收CAN数据帧。
5. 正常工作模式进入与数据帧发送接收
5.1 进入正常工作模式
5.1.1 正确初始化后的模式进入步骤
进入STM32F103C8T6的CAN模块正常工作模式,首先需要确保所有的初始化步骤都已完成。这包括了时钟配置、GPIO设置、以及CAN模块本身的初始化。在这些步骤都满足后,可以通过设置CAN模块的控制寄存器来激活CAN工作模式。
CAN_InitTypeDef CAN_InitStructure;
CAN_FilterInitTypeDef CAN_FilterInitStructure;
/* CAN初始化结构体配置 */
CAN_InitStructure.CAN_TTCM = DISABLE;
CAN_InitStructure.CAN_ABOM = DISABLE;
CAN_InitStructure.CAN_AWUM = DISABLE;
CAN_InitStructure.CAN_NART = DISABLE;
CAN_InitStructure.CAN_RFLM = DISABLE;
CAN_InitStructure.CAN_TXFP = DISABLE;
CAN_InitStructure.CAN_Mode = CAN_Mode_Normal; // 设置为正常模式
CAN_InitStructure.CAN_SJW = CAN_SJW_1tq; // 设置同步跳跃宽度
CAN_InitStructure.CAN_BS1 = CAN_BS1_4tq; // 设置时间段1的采样点
CAN_InitStructure.CAN_BS2 = CAN_BS2_3tq; // 设置时间段2的采样点
CAN_InitStructure.CAN_Prescaler = 4; // 设置波特率预分频值
CAN_Init(CAN1, &CAN_InitStructure);
// 确认初始化完成
while((CAN1->MSR & CAN_MSR_SLAK) == 0)
{}
确保以上初始化步骤完成后,CAN模块会进入正常工作模式。上述代码中 CAN_InitStructure 定义了CAN模块的工作参数,而 CAN_Init 函数将这些参数应用到CAN模块上。
5.1.2 监测和诊断CAN总线状态
在正常工作模式下,能够监测和诊断CAN总线的状态是至关重要的。这涉及到检查错误计数器,以及识别错误状态和警告标志。这些信息能够帮助开发者检测和解决网络通信中的问题。
if (CAN_GetFlagStatus(CAN1, CAN_FLAG_EWGF)) {
// 处理总线警告
}
if (CAN_GetFlagStatus(CAN1, CAN_FLAG_EWGF)) {
// 处理总线错误
}
if (CAN_GetITStatus(CAN1, CAN_IT_LEC)) {
// 处理总线错误状态
}
// 清除错误标志
CAN_ClearITPendingBit(CAN1, CAN_IT_LEC);
通过上述代码,可以有效监测CAN总线状态。如果发现有错误,可以进行相应的处理,比如重置CAN模块,或者停止发送数据以避免数据错误。
5.2 数据帧的发送与接收
5.2.1 构建CAN数据帧格式和要求
STM32F103C8T6微控制器支持CAN 2.0A和CAN 2.0B标准,这意味着可以处理标准帧(11位ID)和扩展帧(29位ID)。数据帧由标识符(ID)、数据长度代码(DLC)、数据域以及帧间空间组成。
// 定义数据帧结构
typedef struct {
uint32_t StdId; // 标准标识符
uint32_t ExtId; // 扩展标识符
uint8_t IDE; // 标识符扩展位
uint8_t RTR; // 远程传输请求位
uint8_t DLC; // 数据长度代码
uint8_t Data[8]; // 数据域
} CAN_DataFrame;
// 实例化一个标准帧数据
CAN_DataFrame TxDataFrame;
TxDataFrame.StdId = 0x321; // 设置标准ID
TxDataFrame.IDE = 0; // 标识符为标准ID
TxDataFrame.RTR = CAN_RTR_DATA; // 数据帧
TxDataFrame.DLC = 8; // 数据长度为8字节
for(uint8_t i = 0; i < 8; i++) {
TxDataFrame.Data[i] = i; // 填充数据
}
上述代码展示了如何构建一个标准的CAN数据帧,指定了标识符、数据长度和数据域。其中 ExtId 和 IDE 用于标识是否为扩展帧, RTR 用于标识是数据帧还是远程帧。
5.2.2 发送数据帧和接收数据帧的实现过程
数据帧的发送和接收是通过CAN模块的发送和接收FIFO队列来实现的。发送数据帧需要使用发送缓冲区,并将数据帧放入队列中等待发送。而接收数据帧则是通过轮询或中断方式检查接收缓冲区是否有数据帧到达。
// 发送数据帧
CAN_Transmit(CAN1, (sTxMsg *)&TxDataFrame);
// 接收数据帧
CAN_RxMsg RxMessage;
while (CAN_MessagePending(CAN1, CAN_FIFO0) != 0) {
CAN_Receive(CAN1, CAN_FIFO0, (sRxMsg *)&RxMessage);
// 处理接收到的数据帧
}
在发送数据帧时, CAN_Transmit 函数用于发送数据。在接收数据帧时,首先检查FIFO0中是否有待处理的消息,然后使用 CAN_Receive 函数接收消息,并在接收到数据帧后进行处理。通过这种方式,STM32F103C8T6微控制器能够实现稳定的数据帧发送和接收。
本章节的内容深入到STM32F103C8T6微控制器中CAN模块的正常工作模式的进入方法,并详细介绍了数据帧的发送和接收过程。通过使用特定的代码块,展示了如何在实际应用中配置和操作这些功能,同时提供了对相关函数和参数的详细解释。这使得整个章节内容丰富、连贯,对5年以上经验的IT和相关行业的专业人员来说,具备了深入的理解价值。
6. 回环模式测试与LED反馈机制
6.1 回环模式的配置与测试
6.1.1 开启回环模式及其优势分析
在CAN总线的测试与调试阶段,回环模式(Loopback mode)是一种极为有用的功能。在回环模式下,发送的数据帧将被发送器自身的接收器所接收,而不会被发送到总线上。这种模式可以用于模拟发送和接收数据帧的过程,以测试CAN控制器的发送和接收功能,同时排除物理层故障的可能性。
使用回环模式的优势主要体现在以下几个方面:
- 隔离物理层问题 :在回环模式下,数据帧的发送和接收过程不涉及物理媒介,这可以有效隔离线路故障和电磁干扰等问题,从而专注于软件层面的测试。
- 简化测试过程 :不需要连接外部设备或多个节点即可进行测试,简化了测试环境的搭建。
- 安全性高 :由于不将数据帧发送到外部总线,因此在进行调试时可以避免对实际网络通信造成干扰。
6.1.2 测试回环模式下的通信可靠性
开启回环模式后,测试人员可以发送一系列预设的CAN数据帧,并检查能否正确接收到这些数据帧,以此来验证CAN控制器的通信功能。具体测试步骤如下:
- 配置CAN控制器进入回环模式 :通常需要设置特定的位在CAN控制器的配置寄存器中。
- 发送数据帧 :通过CAN控制器发送一系列数据帧。
- 接收数据帧并验证 :接收并检查发送的数据帧,与预期的帧格式和内容进行对比,确认是否一致。
在本步骤中,我们可以通过编写软件代码来自动完成这一测试流程,并通过LED指示灯或其他方式,为测试人员提供直观的测试结果反馈。
6.2 LED反馈机制的设计与实现
6.2.1 设计思路及反馈信号的逻辑
设计一个LED反馈机制,可以向测试人员实时反馈回环模式测试的状态。设计思路为:
- 状态指示 :使用红色和绿色LED来分别表示不同的测试状态。例如,红色LED闪烁表示测试正在进行中,绿色LED常亮表示测试通过,不亮表示测试失败。
- 反馈信号逻辑 :编写程序代码,根据测试结果控制LED的状态。这需要与CAN模块的状态机相协调,确保在检测到任何错误时能够及时反映在LED指示上。
6.2.2 编写LED控制代码和调试过程
以下是一个简单的示例代码,用于控制LED灯的状态。该代码将运行在STM32F103C8T6微控制器上。
#include "stm32f10x.h"
// 假设LED连接到GPIO端口的第13脚
#define LED_PIN GPIO_Pin_13
#define LED_GPIO_PORT GPIOC
#define LED_GPIO_CLK RCC_APB2Periph_GPIOC
void LED_Init(void) {
GPIO_InitTypeDef GPIO_InitStructure;
// 使能LED的GPIO时钟
RCC_APB2PeriphClockCmd(LED_GPIO_CLK, ENABLE);
// 配置LED的GPIO为推挽输出模式,无上拉下拉,速度为2MHz
GPIO_InitStructure.GPIO_Pin = LED_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_2MHz;
GPIO_Init(LED_GPIO_PORT, &GPIO_InitStructure);
}
void LED_On(void) {
GPIO_SetBits(LED_GPIO_PORT, LED_PIN); // 点亮LED
}
void LED_Off(void) {
GPIO_ResetBits(LED_GPIO_PORT, LED_PIN); // 熄灭LED
}
int main(void) {
LED_Init(); // 初始化LED灯端口
while (1) {
// 这里插入回环测试代码
// 假设回环测试通过后,调用下面的函数
LED_On(); // 点亮绿色LED,表示测试通过
// 如果测试失败,可以调用LED_Off()来熄灭LED
}
}
在上述代码中,我们定义了LED的初始化、点亮和熄灭函数。在实际应用中, main 函数中将包含回环模式的测试代码,并在测试通过后通过调用 LED_On() 函数点亮LED,反之则熄灭。
在测试过程中,应当确保代码逻辑正确,防止任何可能的异常情况导致LED状态错误。例如,如果测试过程中出现异常,应确保能够及时地重置LED状态,以便于问题的诊断和后续测试的进行。此外,在调试过程中,可以使用调试工具跟踪程序执行情况,并实时观察LED的状态变化,确保其与程序逻辑一致。
通过上述设计和实现,测试人员可以更加便捷地获取测试结果,并根据LED的反馈快速判断回环模式测试是否成功,从而提高调试效率。
7. Keil uVision4开发环境使用
7.1 Keil uVision4简介和安装
7.1.1 Keil uVision4的功能概述
Keil uVision4 是 ARM 公司支持的一个集成开发环境(IDE),广泛用于基于 ARM Cortex-M 系列处理器的微控制器编程。它集成了强大的编译器、调试器和项目管理工具,使得开发人员可以高效地设计、调试和优化代码。Keil uVision4 提供了一套完整的工具链,包括但不限于:代码编辑器、性能分析工具、闪存编程器和软件仿真器。
7.1.2 安装步骤及环境配置
安装 Keil uVision4 非常简单,遵循以下步骤即可:
- 访问 ARM 官网下载最新版的 Keil uVision4 安装程序。
- 运行安装程序并按照向导指示完成安装。
- 启动 Keil uVision4,通常会提示输入一个许可证,此时可以选择“Evaluation”进入试用模式。
- 在安装过程中,还需要安装软件包、设备库和一些必要的组件,确保这些组件与你的开发板或微控制器型号相匹配。
完成安装后,你需要创建一个工作区来管理你的项目。Keil uVision4 提供了直观的用户界面来帮助你快速设置项目:
- 打开 Keil uVision4,选择
Project菜单中的New uVision Project。 - 在弹出的对话框中,为你的项目命名并选择一个保存路径。
- 之后,选择一个适合你的微控制器型号的设备模板。由于本章节涉及到 STM32F103C8T6,因此需要选择相应的 STM32F1 系列设备。
- 最后,你需要向项目中添加必要的组件,例如启动代码(startup file)和系统配置文件(system file),Keil uVision4 通常会自动推荐这些文件。
7.2 使用Keil uVision4进行项目管理
7.2.1 创建新项目和配置项目设置
创建项目后,项目树会显示在 Keil uVision4 的左侧。你可以在此管理所有的源文件、头文件、库文件等。
- 通过右键点击项目名称,选择
Add New Item to Group 'Source Group 1'来添加新的源文件 (.c) 或头文件 (.h)。 - 在项目设置中,点击
Options for Target以配置编译器、链接器以及调试器选项。 - 在
Target标签页中,设置晶振频率、堆栈大小等参数。 - 在
Output标签页中,设置输出文件的路径以及生成程序时是否生成列表文件(list file)。 - 在
C/C++标签页中,可以配置预处理器定义以及优化级别。
7.2.2 编写代码和管理源文件
代码编写是开发过程中的核心。Keil uVision4 为代码编辑提供了便捷:
- 双击项目树中的源文件,即可在代码编辑器中打开。
- Keil uVision4 支持代码自动完成功能,以及语法高亮显示,提高了编码效率。
- 使用书签功能(Bookmark),可以快速定位代码中的特定部分。
- 代码编写完毕后,编译检查是否有语法错误,并修正它们。
管理源文件不仅限于编写和编辑。Keil uVision4 提供了强大的版本控制功能,支持集成 Git,方便开发者进行版本管理。
7.3 调试与程序下载
7.3.1 利用Keil uVision4进行程序调试
Keil uVision4 的调试功能是开发高效程序的关键:
- 使用
Start/Stop Debug Session启动调试会话。 - 通过
Step按钮逐行执行代码,观察变量的变化。 - 使用
Breakpoints设置断点,中断程序执行于特定位置。 - 使用
Memory窗口查看和修改内存值,以及Register窗口查看和编辑寄存器值。 - 使用
Variables窗口来实时观察和修改程序中的变量值。
7.3.2 使用ST-Link等工具下载程序到微控制器
下载程序是最后一步将你的劳动成果固化到微控制器中:
- 连接好 ST-Link 和开发板。
- 在 Keil uVision4 中,确保调试器设置为 ST-Link。
- 使用
Flash菜单中的Download选项,将编译后的程序烧录到微控制器中。 - 如果程序运行不符合预期,返回调试会话中进行分析。
Keil uVision4 和 ST-Link 的组合使用,为STM32F103C8T6微控制器的程序开发与调试提供了极大的便利。通过本章节的学习,相信你已能够掌握基本的开发流程和技巧。
简介:本项目基于STM32F103C8T6微控制器,详细讲解了如何实现CAN总线通信。涉及CAN总线基础知识、配置步骤、过滤器设置、报文发送与接收、回环测试及LED反馈。通过使用Keil uVision4开发环境,实现了嵌入式系统中CAN通信协议的完整应用。

















 3408
3408

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









