







简介:在嵌入式系统或RTOS中,定时器是执行时间相关功能的关键组件。通过多定时器复用单一硬件定时器技术,可以有效减少硬件成本并提升系统性能。这一技术涉及时间轮算法和优先级队列等软件调度机制,以支持多种定时任务。虽然该技术提高了资源利用率和系统效率,但也增加了软件设计的复杂性。开发者需根据具体需求选择合适的多定时器管理方法,如FreeRTOS的软件定时器服务,以优化系统性能。 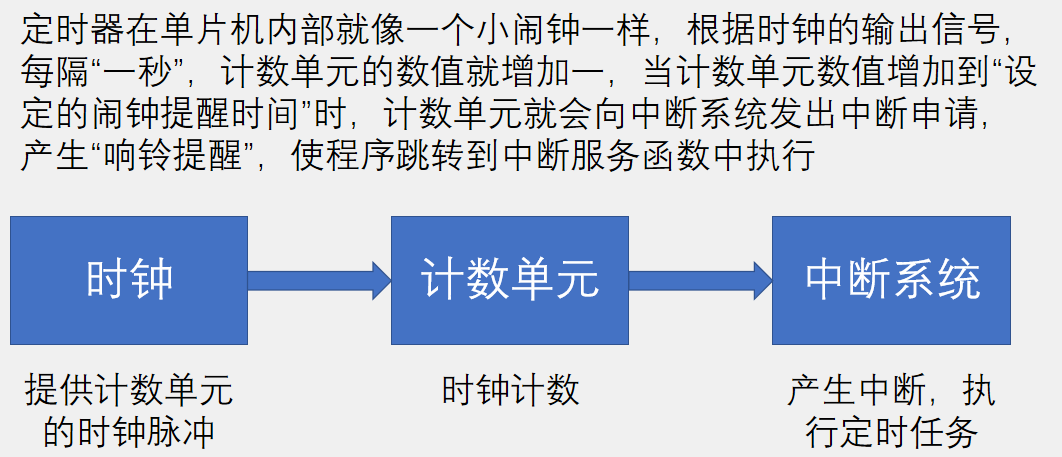
1. 多定时器复用技术概念
多定时器复用技术是现代实时操作系统(RTOS)和高性能应用中不可或缺的一部分。它允许有限的硬件资源在同一时间段内支持更多的定时任务,从而提高了资源的利用率和系统的响应性。通过对定时器进行复用,开发者可以在不增加额外硬件开销的情况下,扩展定时器的功能和应用场景。
在本章节中,我们将首先介绍多定时器复用的基本概念和它在现代IT系统中的重要性。我们将探讨该技术是如何使得多个定时任务共享同一个硬件定时器资源,以及这种做法如何对系统性能和资源利用产生积极的影响。之后,我们将逐步深入,详细解析实现多定时器复用的技术挑战和方法。
多定时器复用技术简介
多定时器复用技术主要是通过软件算法,如时间轮算法,来模拟硬件定时器的行为。这样,多个定时任务可以被安排在同一个物理硬件定时器上运行,而不会互相干扰,从而在逻辑上实现了定时器的“复用”。这种技术尤其适用于硬件定时器数量有限的系统,如嵌入式设备和小型微控制器。
多定时器复用的现实意义
在许多实际应用场景中,如网络通信、数据采集和处理等,需要定时器以非常高的频率和精度来触发事件。如果每个定时任务都分配一个物理定时器,这将导致硬件资源的极大浪费,同时也会限制系统的扩展性和处理能力。因此,多定时器复用技术成为了提高系统资源利用率、优化系统性能的关键。
在接下来的章节中,我们将深入了解硬件定时器的功能和限制,并探讨时间轮算法如何用于实现多定时器的高效管理。
2. 硬件定时器功能与限制
硬件定时器是现代计算机系统中用于提供定时、计时和中断服务的基本硬件资源。它们对于实现操作系统的调度、任务的时序控制以及多任务的协同执行至关重要。本章节将深入探讨硬件定时器的基本工作原理、性能瓶颈,以及它们如何影响系统设计和应用的效率。
2.1 硬件定时器的基本工作原理
2.1.1 定时器的初始化与配置
硬件定时器在被使用之前需要进行一系列的初始化和配置步骤。这通常包括设置定时器的工作模式(如周期性或一次性)、预设时间间隔、配置中断和选择触发条件等。
// 伪代码展示硬件定时器的基本初始化过程
void init_timer(uint32_t timeout, timer_callback callback) {
// 设置定时器的工作模式
set_timer_mode(TIMER_PERIODIC); // 设置为周期性模式
// 配置定时器预设时间间隔
set_timer_interval(timeout);
// 配置中断和触发条件
enable_timer_interrupt();
// 注册回调函数,当定时器到期时调用
register_callback(callback);
}
2.1.2 定时器中断机制及其应用
硬件定时器的主要功能是产生定时中断,中断机制允许处理器在特定时间间隔后暂停当前任务,转而处理紧急事件或执行预定任务。中断处理程序通常由操作系统内核或者应用层的回调函数实现。
// 伪代码展示定时器中断处理程序
void timer_interrupt_handler() {
// 检查并确认中断源
if (is_timer_interrupt()) {
// 执行定时任务
execute_scheduled_task();
// 清除中断标志位
clear_timer_interrupt();
// 重新加载定时器(若为周期性定时器)
reload_timer();
}
}
2.2 硬件定时器的性能瓶颈
2.2.1 定时器精度与分辨率问题
硬件定时器的精度和分辨率通常受限于其硬件设计,例如振荡器的频率稳定性以及定时器的计数能力。在设计高性能系统时,这些因素可能会成为系统性能的瓶颈。
2.2.2 多定时器硬件资源的竞争
随着系统中定时器需求的增加,多个任务可能争用有限的硬件定时器资源,这会导致资源竞争和调度延迟。此外,错误的管理策略可能导致定时器中断的频繁触发,进而影响系统整体性能。
为了应对这些限制,开发者往往需要采取特殊的策略,例如使用软件模拟定时器、采用高级的时间管理算法,或者优化任务调度策略来缓解资源竞争的问题。下一章节将介绍时间轮算法,这是一种高效的定时任务调度策略。
3. 时间轮算法的调度原理
3.1 时间轮算法基础
3.1.1 时间轮算法的概念与优势
时间轮算法是一种高效的定时器调度机制,它借鉴了现实世界中的时钟结构,将时间划分为一系列的槽位(slot),每个槽位代表一个时间区间。与传统的线性列表相比,时间轮算法可以大大减少定时器查找的复杂度,从而提高了定时任务的调度效率。
时间轮算法的优势在于其时间复杂度较低。在时间轮中,每个定时器只需存储在一个槽位上,并且每次时间的推进只需要将当前槽位上的定时器移动到下一个槽位。这种操作的时间复杂度为O(1),即使在有大量的定时器时,也能保持高效的运行。
3.1.2 时间轮算法的基本结构和操作
时间轮算法的核心思想是将时间的流划分成离散的区间,这些区间被组织成一个环形的结构。时间轮通常由多个层级构成,每一个层级代表不同的时间粒度。较低层级的每个槽位对应的时间区间较短,层级越高,槽位对应的时间区间越长。
基本操作包括: - 时间推进 :当时间向前推进时,移动到下一个槽位,即每个槽位的定时器被检查,到期的任务被执行,未到期的则被重新安排到下一个时间区间。 - 定时器设置 :当一个新的定时器需要被设置时,根据定时器的到期时间确定其应该放在哪个层级的时间轮上,并将其插入对应槽位的链表中。 - 定时器取消 :在需要取消一个定时器时,通过查找对应槽位的链表来快速定位并删除该定时器。
3.2 时间轮算法的高级应用
3.2.1 时间轮算法的动态调整策略
时间轮算法可以动态地根据系统负载调整大小和层级。例如,在系统负载较低时,可以合并低层级的时间轮以减少内存消耗;在负载较高时,可以增加更多的层级以支持更多的定时器。
动态调整策略包括: - 时间轮分裂 :当一个时间轮槽位上的定时器数量过多时,可以将该时间轮分裂成两个较小的时间轮,以分散负载。 - 时间轮合并 :在相反的情况下,可以将两个相邻的时间轮合并,减少层级。
3.2.2 时间轮算法在复杂场景下的实现
在复杂场景下,如网络设备、分布式系统等,时间轮算法需要进行优化以适应不同的需求。例如,支持高精度定时器、多线程环境下的安全访问和分布式时间同步。
高级实现可能包含: - 多级时间轮 :通过多级时间轮来支持不同精度级别的定时器。 - 安全机制 :为多线程环境下的时间轮引入锁机制,确保定时器操作的线程安全。 - 分布式时间同步 :在分布式系统中,时间轮算法需要与其他节点进行时间同步,确保全局时间的一致性。
graph TD
A[开始] --> B[初始化时间轮]
B --> C[定时器设置]
C --> D[时间推进]
D --> |到期| E[执行定时器任务]
D --> |未到期| F[重新安排定时器]
E --> G[检查是否需要动态调整]
F --> G
G --> |需要调整| H[执行动态调整策略]
G --> |不需要调整| I[继续时间推进]
H --> I
I --> J[结束]
以上mermaid流程图展示了时间轮算法的核心流程和动态调整策略。在实际应用中,算法的实现可能涉及更多的细节处理,如内存管理、错误处理和性能监控等。代码示例如下:
struct timer_wheel {
int num_slots; // 槽位数量
struct list_head *slots; // 槽位链表数组
int current_slot; // 当前槽位索引
int level; // 时间轮层级
};
void timer_wheel Advance() {
// 时间推进操作
int old_slot = current_slot;
current_slot = (current_slot + 1) % num_slots;
// 将当前槽位的定时器移动到下一个槽位
list_for_each_entry_safe(timer, tmp, &slots[old_slot], list) {
list_del(&timer->list);
list_add_tail(&timer->list, &slots[current_slot]);
}
}
void timer_wheel SetTimer(struct timer_wheel *wheel, struct timer *timer, int timeout) {
// 定时器设置操作
int slot_index = (wheel->current_slot + timeout) % wheel->num_slots;
list_add_tail(&timer->list, &wheel->slots[slot_index]);
}
代码逻辑逐行解释: - struct timer_wheel 定义了时间轮的数据结构,包含槽位数量、槽位链表数组、当前槽位索引和时间轮层级。 - Advance 函数实现了时间推进的核心逻辑,它更新当前槽位索引,并将当前槽位的定时器移动到下一个槽位。 - SetTimer 函数用于添加一个新的定时器到时间轮中,通过计算定时器到期后的槽位索引,将定时器插入对应槽位的链表。
通过上述介绍,我们可以看到时间轮算法在定时任务调度中的重要性和应用潜力。在下一章节中,我们将探讨优先级队列管理技术在定时器管理中的应用。
4. 优先级队列管理技术
优先级队列管理技术在多定时器复用技术中扮演着至关重要的角色。它确保了在资源有限的情况下,能够根据任务的重要性及紧急程度,合理地调度每个定时器。接下来,我们将深入探讨优先级队列管理技术,并揭示其在定时器管理中的具体应用。
4.1 优先级队列的基本概念
4.1.1 优先级队列的定义和特性
优先级队列是一种数据结构,它允许元素按照优先级顺序进行排列。在这一数据结构中,每个元素都有一个与之相关的优先级,队列按照元素的优先级顺序进行访问。与普通队列不同的是,优先级队列不遵循先进先出的原则。优先级最高的元素总是排在队列的最前面,可以最先被取出。
4.1.2 优先级队列的实现方式
有多种方式可以实现优先级队列,如使用堆、数组、链表等。堆是一种非常高效的数据结构,它能够保证插入和删除操作的时间复杂度为 O(log n)。数组和链表实现的优先级队列操作的时间复杂度为 O(n)。不同的实现方式会根据不同的使用场景和性能要求来选取。
4.2 优先级队列在定时器管理中的应用
4.2.1 定时任务的优先级调度
在定时器管理系统中,每一个定时任务都会被赋予一个优先级。通过优先级队列,系统能够将到期的任务按照优先级顺序进行处理。例如,紧急报警或数据包发送等任务,其优先级应该比普通的定时任务更高,以确保能够得到及时的处理。
下面通过一个伪代码示例来展示如何使用优先级队列来管理定时任务:
import heapq
class PriorityQueue:
def __init__(self):
self._queue = []
self._index = 0
def push(self, item, priority):
# item 是任务,priority 是优先级
heapq.heappush(self._queue, (-priority, self._index, item))
self._index += 1
def pop(self):
return heapq.heappop(self._queue)[-1]
# 初始化优先级队列
queue = PriorityQueue()
# 添加任务到优先级队列
queue.push("普通任务", priority=5)
queue.push("紧急任务", priority=10)
# 弹出优先级最高的任务并执行
while queue._queue:
task = queue.pop()
print(f"执行任务: {task}")
在上述代码中,我们定义了一个名为 PriorityQueue 的类,使用 Python 标准库中的 heapq 模块来实现一个最小堆,以此来确保每次弹出的都是优先级最高的任务。
4.2.2 动态优先级调整与优化策略
在实际应用中,任务的优先级可能不是固定不变的。例如,在一个游戏服务器中,玩家的互动可能需要根据互动频率动态调整优先级。优先级队列同样需要支持动态优先级调整的机制,允许在运行时改变任务的优先级,并立即反映在队列的排序上。
一个简单的动态调整策略如下:
- 系统定期检查任务的优先级,并根据特定的业务逻辑进行调整。
- 调整优先级后,使用特定的算法重新插入队列,以保持队列的有序性。
调整优先级时需要注意的是,如果调整操作过于频繁,可能会对系统的性能造成影响。因此,动态优先级调整机制需要在性能和灵活性之间找到平衡点。
通过本章节的介绍,我们可以看到,优先级队列管理技术为多定时器复用技术提供了强大的调度支持。它能够有效地管理不同优先级的定时任务,并在有限的硬件资源下优化任务的执行顺序,从而提升系统的整体性能。
5. 多定时器管理优势与挑战
多定时器管理技术在现代IT系统中扮演着至关重要的角色。这一技术不仅提高了资源的利用率,还在系统性能提升方面表现卓越。然而,随着技术的发展,它也面临着众多挑战。本章节将深入探讨多定时器管理的优势,并分析实施中遇到的挑战。
5.1 多定时器管理的优势分析
5.1.1 提高资源利用率
在现代IT系统中,资源总是有限的,尤其是对于嵌入式系统和实时操作系统(RTOS)。通过采用多定时器管理,可以更加有效地使用硬件定时器资源。硬件定时器是有限的,系统中可能有成百上千个定时任务需要执行。如果不使用多定时器管理技术,这些任务要么争夺有限的硬件定时器资源,要么通过软件定时器来实现,后者往往效率低下,且无法满足实时性要求。多定时器管理可以将这些任务按照优先级和时间需求合理分配,让每个硬件定时器都能在最短的时间内得到最大化的使用。
代码示例:
// 假设有一个简单的任务结构体和任务管理函数
typedef struct {
int id; // 任务ID
int expiration; // 到期时间
int priority; // 任务优先级
} TimerTask;
void manageTimerTasks(TimerTask* tasks, int size) {
// 任务管理逻辑,具体实现依赖于优先级队列和时间轮算法
// ...
}
5.1.2 系统性能的提升
采用多定时器管理技术的系统能够更加灵活和高效地处理定时任务。这种技术可以在不增加额外硬件资源的情况下,通过软件逻辑优化定时任务的调度,从而减少任务执行的延迟和提升系统的吞吐量。以时间轮算法为例,通过将时间分成不同的槽(slot),每个槽对应一个时间段,定时任务可以被分配到相应的时间槽内。这样,系统只需在当前槽时间到达时处理槽内任务,大大减少了查找和调度的开销。
时间轮算法mermaid流程图:
graph TD
A[开始] --> B[初始化时间轮]
B --> C[等待下一个时间槽]
C --> D[槽1时间到]
C --> E[槽2时间到]
C --> F[槽3时间到]
D --> G[处理槽1任务]
E --> H[处理槽2任务]
F --> I[处理槽3任务]
G --> J[继续等待下一个时间槽]
H --> J
I --> J
5.2 多定时器管理面临的挑战
5.2.1 时间同步问题
在多定时器管理中,时间同步是关键问题之一。由于任务可能被分配到不同的时间槽或不同的硬件定时器,这就需要确保系统内的所有定时器和时间轮的时间基准是一致的。否则,可能导致任务的执行时间出现偏差,影响系统的实时性和准确性。
表格:时间同步策略
| 策略 | 说明 | | --- | --- | | 硬件时钟同步 | 使用外部硬件时钟源,如GPS或原子钟,为系统提供统一的时钟源 | | 软件时钟同步 | 通过软件算法对时钟进行校准,如NTP协议 | | 时间轮同步 | 在时间轮的每个槽开始时,重新校准时间 |
5.2.2 复杂场景下的资源调度策略
在复杂的应用场景下,资源调度策略的设计尤为关键。如何在保证高优先级任务准时执行的同时,合理安排低优先级任务,保证系统的总体性能,是一个需要解决的问题。这不仅要求时间轮算法具有高度的灵活性,还需要实现一套动态的调度策略,以适应任务执行期间可能发生的各种情况。
代码块与逻辑分析:
// 动态调整时间轮槽的函数示例
void adjustTimeWheelSlot(int wheelSize, int currentTime) {
// wheelSize - 时间轮的大小
// currentTime - 当前系统时间
int slotIndex = currentTime % wheelSize; // 计算当前时间所在的槽索引
// ... 在此处实现时间轮的动态调整逻辑 ...
// 例如:如果发现某个槽的任务积压严重,则可以将其任务重新分配到其他空闲槽
}
在以上代码块中,通过计算 currentTime 对 wheelSize 取余,可以得到当前时间应该在时间轮中的槽位索引。这种动态调整机制是应对复杂场景下调度策略的关键。
总结而言,多定时器管理在现代IT系统中的应用是提升效率和性能的重要途径。然而,为了充分发挥其优势,必须处理好时间同步和资源调度策略两大挑战。通过优化算法和策略,可以使得多定时器管理技术更好地服务于日益复杂的系统需求。
6. 嵌入式系统与RTOS中应用实例
在嵌入式系统和实时操作系统(RTOS)中,定时器复用技术的应用尤为重要,因为它们需要在有限的资源下实现精确的时间控制和事件管理。本章将重点介绍这些应用案例,从常见的嵌入式平台的定时器应用,到RTOS中定时器管理机制的深入探讨。
6.1 嵌入式系统中的定时器复用案例
嵌入式系统是计算机技术的一个重要分支,它在消费电子、工业控制、物联网设备等领域中应用广泛。由于嵌入式设备通常资源有限,因此高效地使用定时器资源是设计中的一个关键因素。
6.1.1 常见嵌入式平台的定时器应用
以Arduino和STM32为例,这两个平台在嵌入式开发中都非常受欢迎。
- Arduino :Arduino板上通常集成了多种定时器,这些定时器可以用于实现精确的时序控制,例如控制LED的闪烁频率、读取传感器数据等。Arduino允许使用内置的
millis()函数来避免使用阻塞式的delay(),以此来实现多任务的非阻塞操作。
unsigned long previousMillis = 0; // 上一次的时间戳
// 设置定时器
unsigned long interval = 1000; // 1000毫秒
void setup() {
pinMode(LED_BUILTIN, OUTPUT); // 初始化内置LED
}
void loop() {
unsigned long currentMillis = millis();
if (currentMillis - previousMillis >= interval) {
previousMillis = currentMillis; // 保存当前时间戳
digitalWrite(LED_BUILTIN, !digitalRead(LED_BUILTIN)); // 切换LED状态
}
}
- STM32 :STM32系列微控制器使用HAL库来操作硬件定时器,可以用于生成精确的时基,实现定时任务。STM32的定时器具有高精度和灵活性,可以配置为多种模式,如输入捕获、输出比较等。
6.1.2 针对特定硬件的优化方案
在嵌入式开发中,针对特定硬件的优化方案可能包括减少中断服务例程(ISR)中的执行时间、优化定时器配置以及利用硬件加速特性等。例如,通过合理配置STM32的时钟树,可以减少CPU负载,提高定时器的精度。
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim) {
if (htim->Instance == TIMx) { // 确认是正确的定时器
// 执行定时任务
}
}
// 定时器配置代码(简化版)
TIM_HandleTypeDef htim;
htim.Instance = TIMx;
htim.Init.Period = 65535; // 设置自动重装载寄存器周期的值
htim.Init.Prescaler = (uint32_t)(SystemCoreClock / 10000) - 1; // 设置时钟预分频数,此处为10kHz
HAL_TIM_Base_Init(&htim);
HAL_TIM_Base_Start_IT(&htim); // 开启定时器中断
6.2 实时操作系统RTOS中的实践
RTOS提供了更加先进的定时器管理机制,这些机制在保证实时性的同时,允许系统更加高效地使用定时器资源。
6.2.1 RTOS中定时器管理机制
RTOS中的定时器管理机制一般包括软件定时器和硬件定时器的结合使用,以及定时器事件的通知机制。例如,FreeRTOS提供了一个可选的Tickless IDLE模式,该模式在系统空闲时减少定时器中断的次数,从而节省能量。
TimerHandle_t xTimer;
void vTimerCallback(TimerHandle_t xTimer) {
// 定时器到期时要执行的代码
}
void setupRTOSTimer() {
xTimer = xTimerCreate("RTOS Timer", pdMS_TO_TICKS(1000), pdTRUE, (void *)0, vTimerCallback);
xTimerStart(xTimer, 0);
}
// Tickless IDLE模式配置
void vApplicationTickHook(void) {
// 在这里可以修改tick计数器,进入Tickless IDLE模式
}
6.2.2 高效定时器复用的系统设计实例
在设计RTOS系统时,开发者需要考虑到定时器的复用,以减少资源消耗,提高系统的响应速度。这通常涉及到对定时器回调函数的优化,以及对定时器中断服务程序的精心设计。
为了实现高效的定时器复用,开发者可以采取以下策略:
- 合理的定时器调度 :设计时要考虑到不同任务对定时器精度和响应时间的要求,合理安排定时器的配置。
- 回调函数的执行优化 :定时器的回调函数应该尽可能简短,避免在回调函数中执行复杂操作或长时间阻塞。
- 优先级分配 :系统中的定时器应根据任务的重要性和紧急程度进行优先级分配。
通过以上实践和优化策略,可以在嵌入式系统和RTOS中高效地复用定时器资源,从而使得系统设计更加稳定、可靠和高效。
简介:在嵌入式系统或RTOS中,定时器是执行时间相关功能的关键组件。通过多定时器复用单一硬件定时器技术,可以有效减少硬件成本并提升系统性能。这一技术涉及时间轮算法和优先级队列等软件调度机制,以支持多种定时任务。虽然该技术提高了资源利用率和系统效率,但也增加了软件设计的复杂性。开发者需根据具体需求选择合适的多定时器管理方法,如FreeRTOS的软件定时器服务,以优化系统性能。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









