






矩阵和图像的操作
(1)cvInRange函数
其结构
void cvInRange(//提取图像中在阈值中间的部分
const CvArr* src,//目标图像
const CvArr* lower,//阈值下限
const CvArr* upper,//阈值上限
CvArr* dst//结果图像
);实例代码
#include <cv.h>
#include <highgui.h>
#include <stdio.h>
#include <iostream>
using namespace std;
int main()
{
IplImage *src1,*src2,*dst11,*dst12,*dst13,*dst21,*dst22,*dst23;
src1=cvLoadImage("5.jpg");
src2=cvLoadImage("7.jpg");
dst11 = cvCreateImage(cvSize(src1->width, src1->height), IPL_DEPTH_8U, 1);
dst12 = cvCreateImage(cvSize(src1->width, src1->height), IPL_DEPTH_8U, 1);
dst13 = cvCreateImage(cvSize(src1->width, src1->height), IPL_DEPTH_8U, 1);
dst21 = cvCreateImage(cvSize(src2->width, src1->height), IPL_DEPTH_8U, 1);
dst22 = cvCreateImage(cvSize(src2->width, src1->height), IPL_DEPTH_8U, 1);
dst23 = cvCreateImage(cvSize(src2->width, src1->height), IPL_DEPTH_8U, 1);
cvSplit(src1, dst11, dst12, dst13, 0);
cvSplit(src2, dst21, dst22, dst23, 0);
cvInRange(dst12,dst21,dst23,dst23);
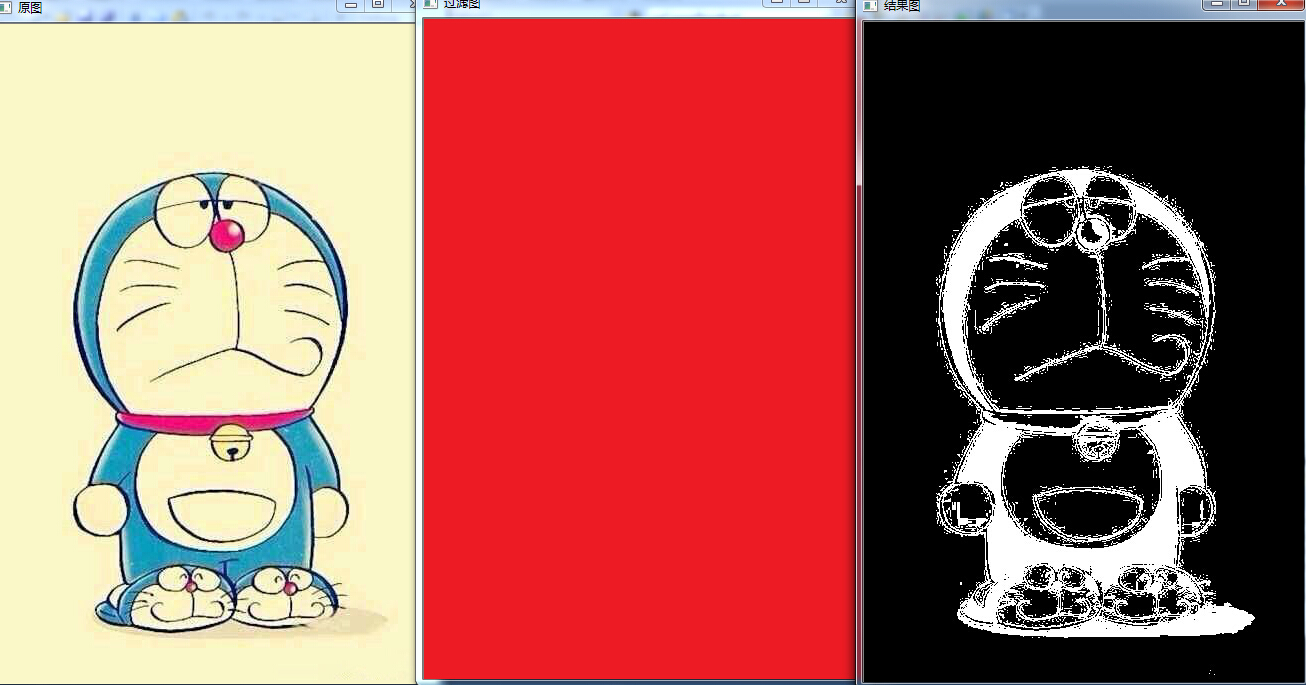
cvShowImage( "原图", src1);
cvShowImage("过滤图",src2);
cvShowImage( "结果图", dst23);
cvWaitKey();
return 0;
}输出结果
(2)cvInRangeS函数
其结构
void cvInRangeS(//提取图像中在阈值中间的部分
const CvArr* src,//目标图像
CvScalar lower,//阈值下限
CvScalar upper,//阈值上限
CvArr* dst//结果图像
);
实例代码
#include <cv.h>
#include <highgui.h>
#include <stdio.h>
#include <iostream>
using namespace std;
int main()
{
IplImage *src1,*src2,*dst11,*dst12,*dst13,*dst21,*dst22,*dst23;
src1=cvLoadImage("5.jpg");
dst11 = cvCreateImage(cvSize(src1->width, src1->height), IPL_DEPTH_8U, 1);
dst12 = cvCreateImage(cvSize(src1->width, src1->height), IPL_DEPTH_8U, 1);
dst13 = cvCreateImage(cvSize(src1->width, src1->height), IPL_DEPTH_8U, 1);
CvScalar cs1;
cs1.val[0] = 0;
cs1.val[1] = 0;
cs1.val[2] = 0;
cs1.val[3] = 0;
CvScalar cs2;
cs2.val[0] = 80;
cs2.val[1] = 0;
cs2.val[2] = 0;
cs2.val[3] = 0;
cvSplit(src1, dst11, dst12, dst13, 0);
cvInRangeS(dst11,cs1,cs2,dst13);
cvShowImage( "原图", src1);
cvShowImage( "变单通过程图", dst11);
cvShowImage( "结果图", dst13);
cvWaitKey();
return 0;
}输出结果

(3)cvInvert函数
其结构
double cvInvert(//矩阵取逆
const CvArr* src,//目标矩阵
CvArr* dst,//结果矩阵
int method = CV_LU//逆运算方法
);当中method有
| 方法的參数值 | 含义 |
| CV_LU | 高斯消去法 |
| CV_SVD | 神秘值分解 |
| CV_SVD_SYM | 对称矩阵的SVD |
实例代码
#include <cv.h>
#include <highgui.h>
#include <stdio.h>
#include <iostream>
using namespace std;
int main()
{
double a[3][3] =
{
{1,0,0},
{0,2,0},
{0,0,3}
};
CvMat va = cvMat(3,3, CV_64FC1,a);
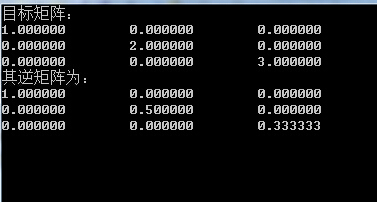
cout<<"目标矩阵:"<<endl;
for(int i=0;i<3;i++)
{
for(int j=0;j<3;j++)
printf("%f\t",cvmGet(&va,i,j));
cout << endl;
}
cvInvert(&va,&va);
cout << "其逆矩阵为:";
cout<<endl;
for(int i=0;i<3;i++)
{
for(int j=0;j<3;j++)
printf("%f\t",cvmGet(&va,i,j));
cout << endl;
}
getchar();
return 0;
}输出结果
(4)cvMahalonobis函数
其结构
CvSize cvMahalonobis(//计算马氏距离
const CvArr* vec1,//样本向量
const CvArr* vec2,//平均值
CvArr* mat//协方差的逆
);ps:关于什么是马氏向量,我也研究了半天,找了一些资料算是弄明确了个大概。
关于马氏距离,定义的话自己百度百科即可。
关于理解和解释请參照博客:点击打开链接 通俗易懂
关于以下的代码实例的数据来源:点击打开链接
实例代码
#include <cv.h>
#include <highgui.h>
#include <stdio.h>
#include <iostream>
using namespace std;
int main()
{
double a1[4] = {3,4,5,6};
double a2[4] = {2,2,8,4};
double b[4] = {2.5, 3, 6.5, 5};
double c[4][4] =
{
{0.25,0.50,-0.75,0.50},
{0.50,1.00,-1.50,1.00},
{-0.75,-1.50,2.25,-1.50},
{0.50,1.00,-1.50,1.00}
};
CvMat va1 = cvMat(1,4, CV_64FC1,a1);
CvMat va2 = cvMat(1,4, CV_64FC1,a2);
CvMat vb = cvMat(1,4, CV_64FC1,b);
CvMat vc = cvMat(4,4, CV_64FC1,c);
cvInvert(&vc,&vc,CV_SVD); //协方差取逆,这个函数前面讲过
double r1 = cvMahalanobis(&va1,&vb,&vc);
double r2 = cvMahalanobis(&va2,&vb,&vc);
cout << "样本1的马氏距离:"<<endl;
cout<<r1<<endl;
cout << "样本2的马氏距离:"<<endl;
cout<<r2<<endl;
getchar();
return 0;
}
to be continued



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









