







1. tracker = cv2.multiTracker_create() 获得追踪的初始化结果
2.cv2.TrackerKCF_create() 获得KCF追踪器
3.cv2.resize(frame, (w, h), cv2.INTER_AEAR) # 进行图像大小的重新变化
参数说明:frame表示输入图片,(w, h) 表示变化后的长和宽, cv2.INTER_AEAR表示插值的方法
4.cv2.selectROI(‘Frame’, frame, fromCenter=False,showCrosshair) 在图像上进行选框操作
参数说明:‘Frame'表示图片的名字,frame表示读取的图片,fromCenter表示选框的起点是否在中心位置,showCrosshair表示是否展示选框
KCF是一种鉴别式追踪方法,这类方法一般在追踪过程中训练一个目标检测器,使用目标检测器与预测下一个阶段预测位置是否是目标,然后使用新检测结果去跟新训练集而跟新目标检测其
KCF贡献
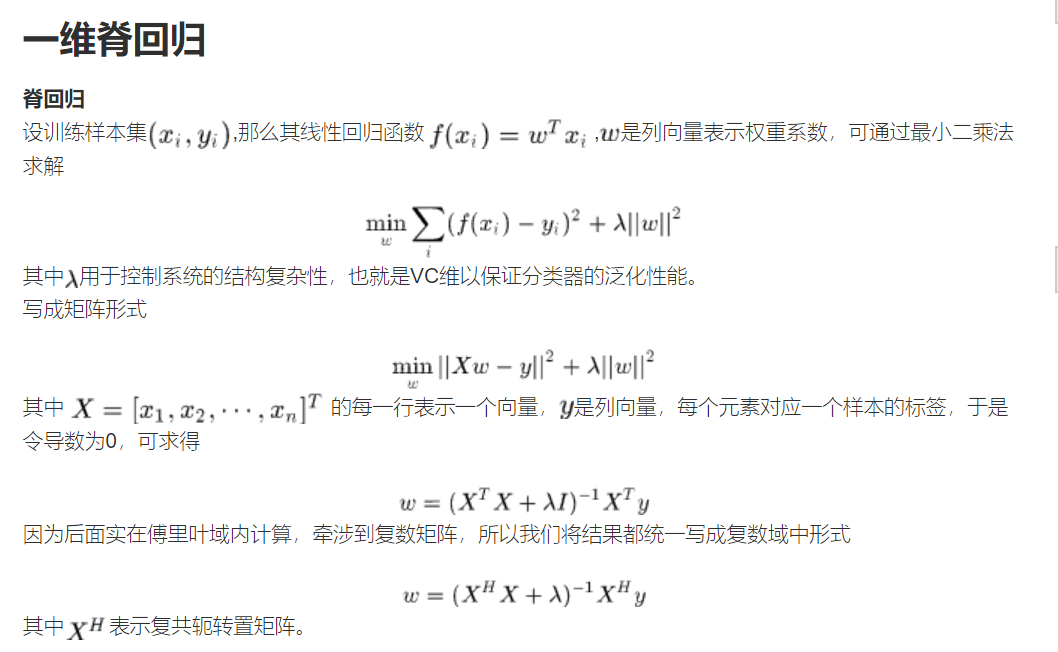
1.使用脊回归训练目标检测器,成功利用循环矩阵在傅里叶空间对角化的性质,将矩阵的运算转换为向量的Hadamad积,即元素的点乘,大大降低了运算量,提高了运算速度
1.脊回归,在原有的基础上引入了λ|w^2| 为了防止过拟合的出现,即w的分布更小且更加均匀(0, 0, 0, 1) 和 (0.25, 0.25, 0.25, 0.25), 对w进行求导,导数为0,解得w
2.循环矩阵,即训练图像都是通过目标样本的循环位移得到的, 通过PxQ进行x轴和y轴的平移变化

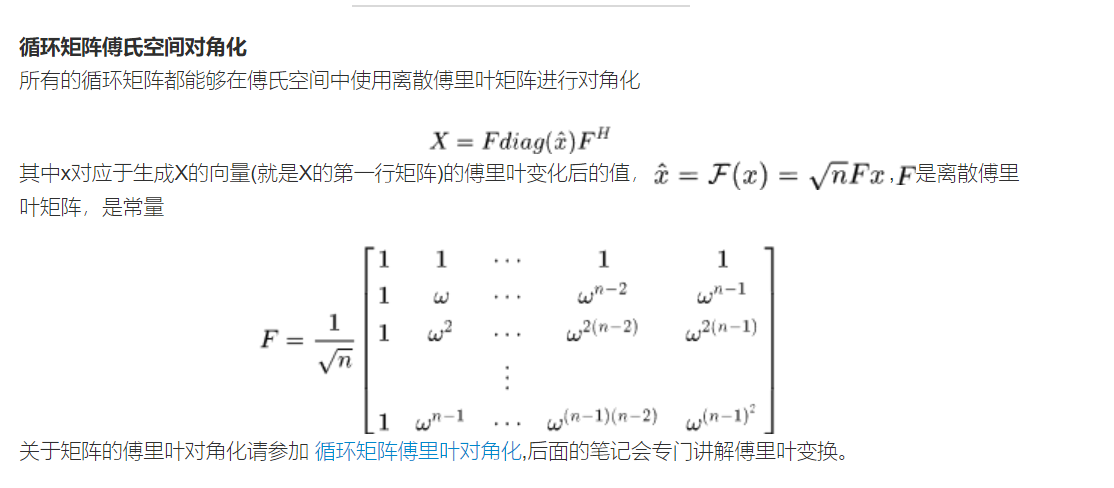
3.傅氏空间矩阵对角化, 即对上述的循环空间做一个傅里叶变化
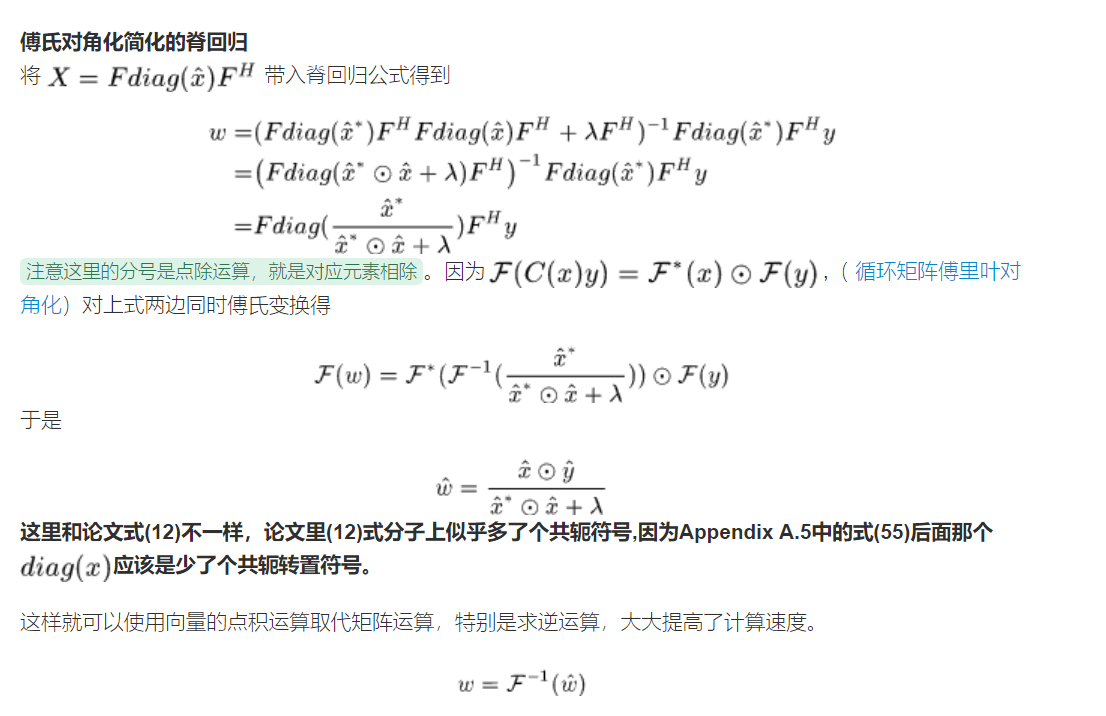
4. 将循环矩阵x带入到脊回归进行求解
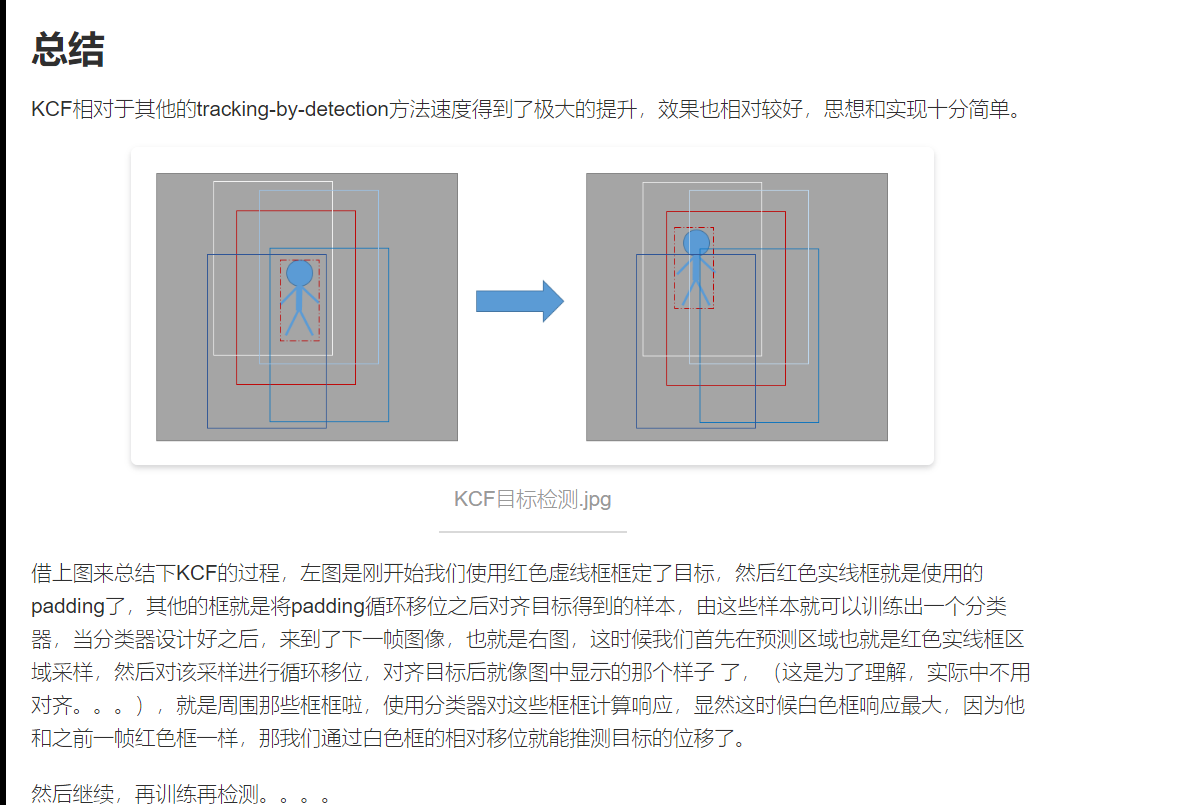
最后做的一个总结部分
参考链接:https://www.cnblogs.com/YiXiaoZhou/p/5925019.html
代码:
第一步: 进行 argparse参数设置
第二步:使用字典构造已有的追踪目标的方法
第三步:使用cv2.multiTracker_create() 构造出追踪器集合trackers
第四步:使用cv2.capt
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 3万+
3万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









