







一、B树定义
1、B树(定义1引自《算法导论(第三版)》):
一棵B树T是具有一下性质的有根树(根为T.root):
(1)每个结点x具有下面属性:
a.x.n,当前存储在结点x中的关键字个数。
b.x.n个关键字本身,x.key1,x.key2,x.key3,x.key4,……,x.keyn,以非降序存放,使得x.key1<=x.key2<=……<=x.keyn。
c.x.leaf,一个布尔值,如果x是叶子结点,则为true;如果x是内部结点,则为false。
(2)每个内部结点x还包含x.n+1个指向其孩子的指针x.c1,x.c2,……,x.cn。叶子结点没有孩子,所以它们的ci属性没有定义。
(3)关键字x.keyi对存储在各子树中的关键字加以分割:如果k为任意一个存储在以x.ci为根的自述中的关键字,那么k为任意一个存储在以x.ci为根的子树中的关键字,则:
k1<=x.key1<=k2<=x.key2<=……<=kn<=x.keyn<=kn+1
(4)每个叶子结点具有相同的深度,即树的高度h。
(5)每一个结点能包含的关键字数由一个上界和下界。这些界可用一个称作B树的最小度数t>=2来表示。
a.每个费根的结点必须至少有t-1个关键字。每个非根的内结点至少有t个子女。如果树是非空的,则根结点至少包含一个关键字。
b.每个结点可包含至多2t-1个关键字。所以一个内结点至多可有2t个子女。我们说一个结点是满的,如果它恰好有2t-1个关键字。
2、B树(定义2引自《计算机程序设计艺术(第三卷)(第三版)》):
阶m的一株B树,是满足一下性质的一株树:
(1)每个结点至多有m个儿子。
(2)除了根和叶之外,每个结点的儿子个数至少是m/2(取上整)。
(3)根至少有两个儿子(除非它是一片叶(叶子结点))。
(4)所有叶都出现在同一级,而且不带信息。
(5)具有k个儿子的非叶子结点含有k-1个键码(关键字)。
3、B树(定义3引自百度百科):
一棵m阶B树(balanced tree of order m)是一棵平衡的m路搜索树。它或者是空树,或者是满足下列性质的树:
(1)根结点至少有两个子女;
(2)每个非根结点所包含的关键字个数 j 满足:┌m/2┐ - 1 <= j <= m - 1;
(3)除根结点以外的所有结点(不包括叶子结点)的度数正好是关键字总数加1,故内部子树个数 k 满足:┌m/2┐ <= k <= m ;
(4)所有的叶子结点都位于同一层。
在B-树中,每个结点中关键字从小到大排列,并且当该结点的孩子是非叶子结点时,该k-1个关键字正好是k个孩子包含的关键字的值域的分划。
因为叶子结点不包含关键字,所以可以把叶子结点看成在树里实际上并不存在外部结点,指向这些外部结点的指针为空,叶子结点的数目正好等于树中所包含的关键字总个数加1。
B-树中的一个包含n个关键字,n+1个指针的结点的一般形式为: (n,P0,K1,P1,K2,P2,…,Kn,Pn)
其中,Ki为关键字,K1<K2<…<Kn, Pi 是指向包括Ki到Ki+1之间的关键字的子树的指针。
4、B树(定义4《数据结构(C语言版)》(2007年版)):
一棵 阶的 B-树,或为空树,或为满足下列特性的叉树:
阶的 B-树,或为空树,或为满足下列特性的叉树:
(1)树中每一个结点至多有棵子树;
(2)若根结点不是叶子结点,则至少有两棵子树;
(3)除根结点之外的所有非终端结点至少有 棵子树;
棵子树;
(4)所有的非终端结点中包含下列信息数据 , 其中:
, 其中: (
( )为关键字,且
)为关键字,且 (
( );
); (
( ) 为指向子树根结点的指针,且指针
) 为指向子树根结点的指针,且指针 所指子树中所有结点的关键字均小于(),
所指子树中所有结点的关键字均小于(), 所指子树中所有结点的关键字均大于
所指子树中所有结点的关键字均大于 ,
, (
( )为关键字的个数(或
)为关键字的个数(或 为子树个数);
为子树个数);
(5)所有的叶子结点都出现在同一层次上,并且不带信息(可以看作是外部结点或查找失败的结点,实际上这些结点不存在,指向这些结点的指针为空)。
其实仔细推敲,上诉四种定义其实只是两种,第一种为《算法导论》第一的最小度为t的B树,除根结点外最少有t-1个关键字和t个子女,最多有2t-1个关键字和2t个子女,且叶子结点含有数据的。第二种是m阶的B树,除根外最少有m/2-1(取上整,后不再重复)个关键字和m/2个子女,最多有m-1个关键字和m个子女,且叶子结点为NULL。
我个人比较认可第一种定义(后面会介绍为何比较认同第一种定义),下面我们来分析一下不同定义下B树的操作方法。
第一种定义下的B树的操作(这里数组的下标以1为起始):
B树的结构:
#define t 2
typedf struct BTNode{
int n;
KeyType key[2*t];
struct BTNode *c[2*t + 1];
bool leaf;
}BTNode, *BTree;对一棵树的操作可以分为新建、查找、前驱、后继、插入(满结点插入和非满结点插入)、删除。
这里以伪代码介绍过程,详细代码可以参看:《B树C语言代码实现》。
B树的模型:
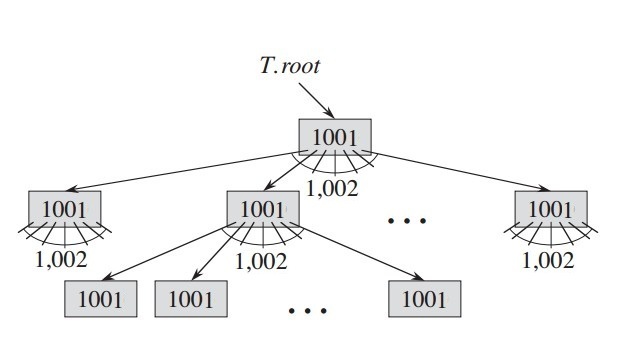
这是一个t为501的满B树,其中有三层,第一层有1001个关键字,1002个子结点;第二层有1003002个关键字,有1004004个子结点;第三层有1005008004个关键字,无子结点。
二、B树的操作
1、创建一棵空的B树
建立一棵空树,其实就是初始化一个结点,作为根结点。这个结点,为叶子结点,且无关键字。
/*
* B树的新建函数,通过对B树 T的根结点进行操作
*/
B-TREE-CREATE(T)
{
/* ALLOCATE-NODE()为新结点x分配磁盘页 */
x = ALLOCATE-NODE();
/* 默认结点为叶子结点 */
x.leaf = TRUE;
x.n = 0;
DISK-WRITE(x);
/* 当前树的根结点为新建结点x */
T.root = x;
}2、搜索B树
查询过程,输入的参数是以一棵子树的根结点,并在此树上进行搜索。
/*
* 寻找k值得结点 * 以x为根结点,进行搜寻
*/
B-TREE-SEARCH(x, k)
{
i = 1;
/* 线性搜索,比较当前结点所有的关键字 */
while i <= x.n and k > x.key[i]
i++;
/* 确认是否找到关键字,找到则返回当前结点以及坐标 */
if i <= x.n and k == x.key[i]
return(x, i);
/* 否则判断是否为叶子结点,如果是,则返回null,表示无法找到 */
else if x.leaf
return NIL;
/* 若既不是叶子结点,也不在当前结点内,则根据性质搜寻子结点 */
else
DISK_READ(x, c[i]);
return B-TREE_SEARCH(x.c[i], k);
}根据上述查询过程可以看出,递归过程构建了一条从树根下降的路径。因此B-TREE-SEARCH读取磁盘页面的个数为Θ(h)=Θ(logtn),h为数的高度,n为结点个数。因为n[x] < 2t,故2-3行处的while循环的时间为O(t),总的CPU时间为O(t*h) = O(t*logtn).
3、向B树插入关键字
向B树插入关键字,这个过程比较复杂,而且,在插入的过程中还需要保证一直满足B树的性质。因此
插入有两种情况:1)当前结点为满结点。2)当前结点为非满结点。
1)分裂函数
满结点时,需要对结点进行分裂,分裂的规则是,进行插入操作时,遇到满结点立即进行分裂。
/*
* x为满结点的父结点,i是满结点在父结点中的位置。
* 当结点为满结点时,即子结点为2t,关键字为2t - 1,
* 分裂时,以第t各关键字为中心,两边分别变为有t - 1个关键字,t个子结点的结点 * 将第t个关键字提到父结点中(由于遇到满结点就分裂,buxu)
*/
B-TREE-SPLIT-CHILD(x, i)
{
/* 建立新的结点z,z作为分裂结点中的左结点 */
z = ALLOCATE-NODE();
/* zh */
y = x.c[i];
/* 为新结点z初始化 */
z.leaf = y.leaf;
z.n = t - 1;
/* 将满结点中的后t-1个关键字赋值到新结点z中 */
for j = 1 to t - 1
z.key[i] = y.key[j + t];
/* 如果y不是叶子结点那么,将满结点y中的后t个子结点赋值到新建结点z中 */
if not y.leaf
for j = 1 to t;
z.c[j] = y.c[j + t];
/* 修改y中的关键字个数 */
y.n = t - 1;
/* 将父结点x中的i之后(不包括i)位置的子结点向后移动一位 */
for j = x.n + 1 downto i + 1
x.c[j + 1] = x.c[j];
/* 将父结点x中的i+1位置的子结点赋值为z */
x.c[i + 1] = z;
/* x中的关键字自i后(包括i)关键字位置向后移动一位 */
for j = x.n downto i
x.key[j + 1] = x.key[i];
/* 将子结点的关键字赋值到父结点中 */ x.key[i] = y.key[t];
/* 关键字个数发生改变 */
x.n = x.n + 1;
/* 对修改进行写磁盘 */
DISK-WRITE(y);
DISK-WRITE(z);
DISK-WRITE(x);
}下面以模型的形式,演示一下:
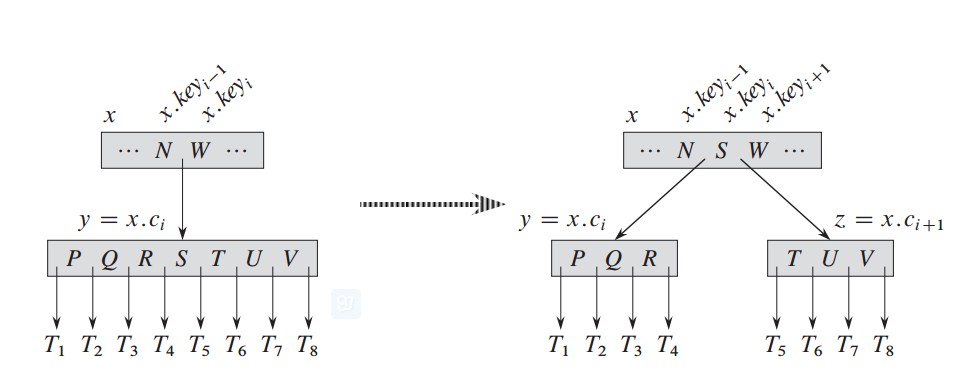
当x结点的子结点y为满结点时,将位置为t的关键字(即中间位置)放置到父结点,然后y结点,平均分为y,z结点。
还有一种特殊情况便是,当需要分裂的是根结点时,我们需要增加一个新的结点s作为根结点,原来的根结点r作为子结点,然后进行分裂:

2)对非满结点进行插入
/*
* 假定x是非满结点 * 当是叶子结点且非满时,直接寻找位置进行插入
* 否则寻找子结点(首先判断是否为满结点)进行插入
*/
B-TREE-INSERT-NONFULL(x, k)
{
/*
* 将x结点的关键字个数赋值给i,这是为了后边的查找位置
*(个人认为这里的循环查找可以变为二分查找)
*/
i = x.n;
/* 当当前结点为叶子结点且非满时,寻找位置插入 */
if x.leaf
while i >= 1 and k < x.key[i]
x.key[i + 1] = x.key[i];
i--;
x.key[i + 1] = k;
x.n = x.n + 1;
DISK-WRITE(x);
/*
* 当当前结点不为叶子结点且非满时,寻找对应的子结点 * 先对子结点进行判断,当为满时,进行分裂,否则递归插入
*/
else while i >= 1 and k < x.key[i]
i--;
i++;
DISK-READ(x.c[i]);
if x.c[i].n == 2*t - 1;
B-TREE-SPLIT-CHILD(x, i);
if k > x.key[i];
i++;
B-TREE-INSERT-NONFULL(x.c[i], k);
}3)插入函数
现在有两个问题没有解决,第一个便是当进行分裂时,满结点即为根结点时,在分裂函数中是没法解决的;第二个问题是当插入结点为满结点的叶子结点时,非空插入函数这里也有问题,这些问题都交给插入操作函数:
/*
* 插入函数,所有插入操作都经过此函数
* T为整棵树,k为关键字
*/
B-TREE-INSERT(T, k)
{
/* 先将树T的根结点赋值给r */
r = T.root;
/* 判断树T的根结点是否为满结点,是的话新建父结点 * 进行分裂操作,然后进行插入操作
*/
if r.n == 2*t - 1
s = ALLOCATE-NODE();
T.root = s;
s.leaf = FALSE;
s.n = 0;
s.c[1] = r;
B-TREE-SPLIT-CHILD(s, 1);
B-TREE-INSERT-NONFULL(s, k);
/* 否则直接进行非满结点插入 */
else B-TREE-INSERT-NONFULL(r, k);
}下面对插入操作进行比较全面的演示:
首先是原始树:
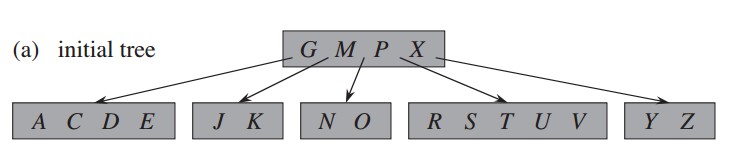
然后插入B,对非满的叶子结点直接插入:

插入Q,由于要插入的结点为满结点,需要将满结点分裂,将中间的关键字放置到父结点对应的位置:

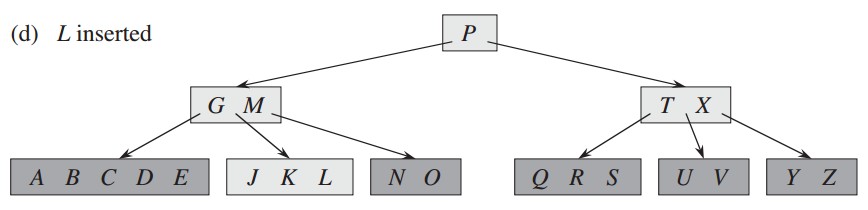
插入L,首先进入到根结点,根结点为满结点,首先分裂根结点,然后下降寻找位置插入:
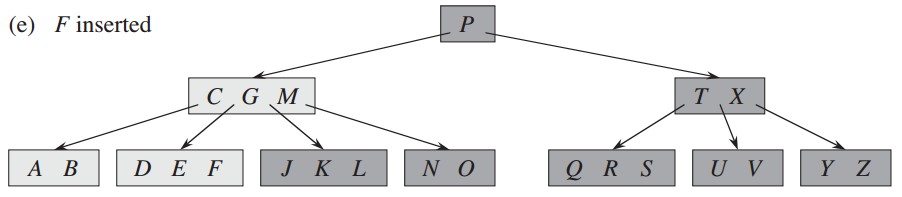
插入F,结点为满结点,首先分裂,然后进行插入;
4、删除关键字
1)语言描述
由于要保证B树的性质,所以对B树删除结点操作有以下规定:
1)如果关键字k在结点x中,而且x是个叶结点,则从x中删除k。
2)如果关键字k在结点x中,而且x是个内结点,则作如下操作:
a.如果结点x中前于k的子结点y包含至少t个关键字,则找出k在以y为根的子树种的前驱k'。递归地删除k',并在x中用k'取代k。
b.对称的,如果y有少于t个关键字,则检查结点x中后于k的子结点z.如果z至少有t个关键字,则找出k在以z为根的子树中的后继k'.递归的删除k',并在x中用k'代替k.
c.否则,如果y和z都只含有t-1个关键字,则将k和z的全部合并进y,这样x就失去了k和指向z的指针,并且y现在包含2*t-1个关键字。然后释放z并递归地从y中删除k。
3)如果关键字k当前不在内部结点x中,则确定必包含k的子树的根x.c[i](如果k确实在树种)。如果x.c[i]只有t-1个关键字,必须执行步骤3a或3b来保证降至一个至少包含t个关键字的结点。然后,通过对x的某个合适的子结点进行递归而结束。
a.如果x.c[i]只含有t-1个关键字,但是它的一个相邻的兄弟至少包含t个关键字,则将x中的某一个关键字降至x.c[i]中,将x.c[i]的相邻的左兄弟或右兄弟的一个关键字升至x,将该兄弟中相应的孩子指针移到x.c[i]中,这样就使得x.c[i]增加一个额外的关键字。
b.如果x.c[i]以及x.c[i]的所有相邻兄弟都只包含t-1个关键字,则将x.c[i]与一个兄弟合并,即将x的一个关键字移至新合并的结点,使之成为该结点的中间关键字。
在2和3中都提到了将关键字进行移动的方法,而左右是不相同的,特此有以下两个方法:
2)过程代码
/*
* 将后继结点或者右兄弟的某个关键字、父结点的某个关键字以及该结点某个关键字进行移动。
* 移动后,注意被移动结点的子结点的移动。
* x父结点,y当前结点,z被移动的结点,i关键字在x关键字中的位置
* 该函数是情形为被移动的结点在该结点的左边
*/
B-TREE-LEFT(x, y, z, i)
{
y.key[y.n+1] = x.key[i];
x.key[i] = z.key[1];
for j = 1 to z.n - 1
z.key[j] = z.hey[j+1];
if not z.leaf
y.c[y.n+2] = z.c[1];
for j = 1 to n
z.c[j] = z.c[j+1];
y.n =y.n+1;
z.n = z.n-1;
free(z.c[j + 1]);
free(z.key[j]);
}/*
* 将后继结点或者右兄弟的某个关键字、父结点的某个关键字以及该结点某个关键字进行移动。
* 移动后,注意被移动结点的子结点的移动。
* x父结点,y当前结点,z被移动的结点,i关键字在x关键字中的位置
* 该函数是情形为被移动的结点在该结点的右边
*/
B-TREE-RIGHT(x, y, z, i)
{
for j = n to 1
y.key[j+1] = y.hey[j];
y.key[1] = x.key[i];
x.key[i] = z.key[z.n];
if not y.leaf
for j = n+1 to 1
y.c[j+1] = y.c[j];
y.c[1] = z.c[z.n+1];
z.n = z.n - 1;
y.n = y.n + 1;
free(z.c[z.n+1]);
free(z.key[z.n]);
} 这里是将两个关键字个数为t-1的子结点和父结点中的关键字合并到左子结点中的方法:
合并,返回下降子结点位置:
/*
* 合并两个子结点 */
B-TREE-MERGE-CHILD(x, i)
{
if i == x.n
i--;
y = x.c[i];
z = x.c[i+1];
y.key[t] = x.key[i];
for j = 1 to z.n
y.key[t+j] = z.key[j];
if not z.leaf
for j = 2 to z.n + 2
y.c[t+j] = z.[j-1];
for j = i to x.n-1
x.key[i] = x.key[i+1];
x.n = x.n - 1;
if not x.n
return i;
}进行模型演示一下合并操作:
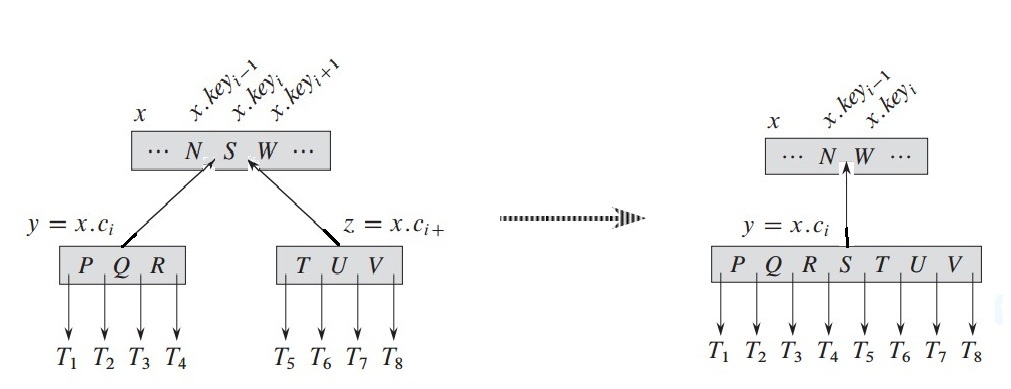
将x中的关键字和z所有的关键字(叶子结点)都合并到y结点中。保证需要下降时的结点关键字个数大于等于t。
/*
* 删除叶子结点的关键字
*/
B-TREE-DELETE-LEAF(x, i)
{
for j = i to x.n - 1
x.key[j] = x.key[j+1];
free(x.key[j+1]);
}/*
* 删除内结点关键字
*/
B-TREE-DELETE-IN(x, i)
{
y = x.c[i];
z = x.c[i+1];
if y.n >= t
k' = TREE-MAXIMUM(y);
key' = x.key[i];
x.key[i] = k'.key[k'.n];
k'.key[k'.n] = key';
else if z.n >= t
k' = TREE-MINIMUM(z);
key' = x.key[i];
x.key[i] = k'.key[0];
k'.key[0] = key';
i++;
else i = B-TREE-MERGE-CHILD(x,i);
return i;
}
/*
* 删除树T的关键字key
*/
B-TREE-DELETE(T, key)
{
x= T.root;
/* 寻找关键字位置,或者下降的子结点位置 */
while i < x.n and key > x.key[i]
i++;
/* 若再该层且为叶子结点删除结点,否则下降寻找结点删除 */
if i < x.n and key == x.key[i]
if(x.leaf)
B-TREE-DELETE-LEAF(x, i);
else
{
i = B-TREE-DELETE-IN(x, i);
B-TREE-DELETE(x.c[i], key);
}
else
{
if x.leaf
printf("there is no the key %d!!\n", key);
else
{
if x.c[i].n >= t
{
B-TREE-DELETE(x.c[i], key);
}
else
{
if i > 0 and x.c[i - 1].n >= t
{
B-TREE-RIGHT(x, x.c[i], x.c[i - 1], i);
}
else if i < x.n and x.c[i + 1].n >= t
B-TREE-LEFT(x, x.c[i], x.c[i + 1], i);
else
i = B-TREE-MERGE-CHILD(x, i);
B-TREE-DELETE(x.c[i], key);
}
}
}
}下面以模型的形式说明各种删除的情况:
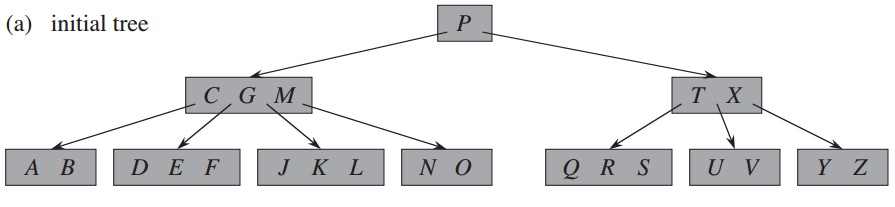
原始树:
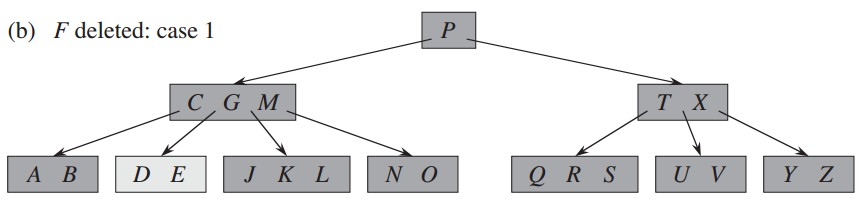
删除关键字F,对应删除描述中的方法1,直接删除叶子结点的关键字,叶子结点的F后的结点全部前移,改变n值:
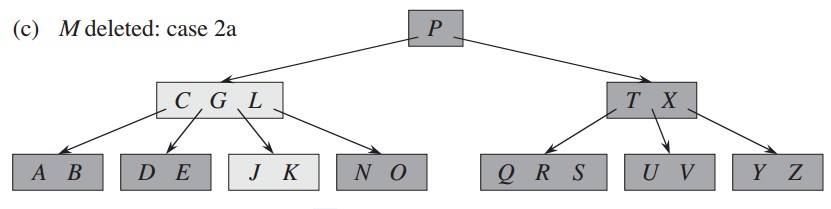
删除关键字M,对应删除描述中的方法2a,前于关键字的子结点关键字大于等于t,将关键字M的前驱和M进行替换,然后删除M;:
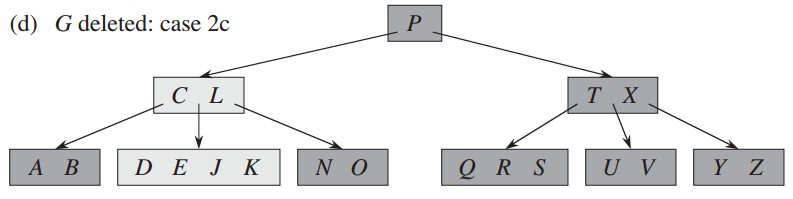
删除关键字G,对应删除描述中的方法2c,关键字G的子结点关键字都等于t-1,以父结点中的关键字作为中间值,合并两个子结点:
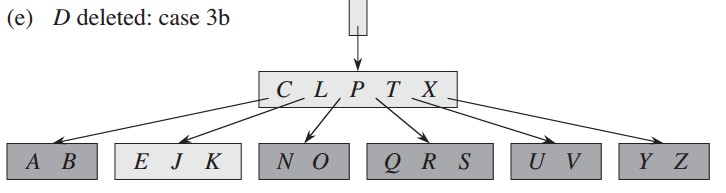
删除关键字D,对应删除描述中的方法3b,首先发现下降的子结点关键字个数等于t-1,他的相邻的子结点个数同样小于t-1,
所以合并两个子结点,然后,下降到新结点,递归删除D:
删除空结点:

删除关键字B,对应删除描述中的方法3a,发现下降结点关键字个数为t-1,则向相邻结点关键字大于等于t和父结点关键字进行调整,满足下降的结点关键字个数大约等于t:

根据插入函数和删除函数可以得知,所有的结点非叶子结点若有n个关键字,肯定有n+1个子结点,也就说,每一个关键字都有前后两个子结点。
又同样根据B树的性质可知:所以就有他的前驱要么是前一个关键字(叶子 结点),要么是前边子 结点的最大的关键字。
他的后继为后一个关键字(叶子结点),要么是后边子结点最小的关键字。
首先是最小结点函数:
/*
* 如果是叶子结点,则返回第一个关键字,否则递归调用
*/
TREE-MINIMUM(x)
{
if islevel
return (x, 1);
if x.leaf
return (x, 1);
else DISK-READ(x.c[1]);
return TREE-MINIMUM(x.c[1]);
}/*
* 如果是叶子结点,则返回最后一个关键字,否则递归调用
*/
TREE-MAXIMUM(x)
{
if islevel
return (x, n);
if x.leaf
return x;
else DISK-READ(x.c[x.n+1]);
return TREE-MAXIMUM(x.c[x.n+1]); }
同时查看所有过程,除了特定的步骤,几乎所有的操作的时间消耗为O(h).
三、定理证明
定理:如果n大于等于1,那么对任意一棵包含n个关键字、高度为h、最小度数t大于等于2的B树T,有
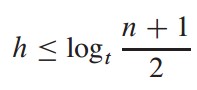
由B树性质可以得知,根结点最少有两个子结点,其他结点除叶子结点都至少有t个子结点,所以有深度为1时有当前层为2个,深度为2时,当前层为2t个结点,深度为3时为2t^2,以此类推,当为深度为h,当前层有2t^(h-1),所以:
即:
![]()
所以证明完毕。
四、支持第一种定义的原因
下面需要阐述下第二种定义,第二种定义的B树查询、新建操作基本一致,插入、删除方法有比较大的不同,和上述不同的地方如下:
1、插入:首先进行插入关键字操作,当关键字个数为m时,该结点为缺陷点,对缺陷点进行分裂,否则插入完成。这就有一个问题,即需要回溯到父结点进行分裂,而当父结点同样为缺陷点后,需要进行再次回溯,这样最坏的情况就需要回溯到根结点。
2、删除:类似于前边的插入操作,先删除,发现该结点为缺陷点(即n小于m/2-1),进行调整,然后回溯,这样就同样会出现,回溯到根结点的情况。
这里的问题主要是需要回溯,这即浪费时间、消耗资源,同时由于需要回溯,那么B树结点结构必须存储父结点进行回溯,又造成了存储的浪费。
若此定义的B树按照第一种定义的B树进行操作,会如何呢?
如果按照第一种定义的进行操作,先分裂(或者合并、调整)的话,当m为奇数时,关键字个数为偶数,提前分裂却违反了B树的定义(当关键字个数为偶数,分裂后两边关键字个数为(m+1)/2 - 1,向上提取一个关键字,则其中一个结点的关键字个数会变为(m+1)/2 - 1 - 1,则小于B树定义中的最小关键字个数m/2 - 1),所以不能够使用,若规定m为偶数,则和第一种定义重复。所以我在这里比较认可的是第一种定义。
第一种定义同样有一些问题,那就是,删除和插入,都是先处理伪缺陷点(满结点或者关键字最小个数的结点),这样的话插入是分裂,删除是合并,那么在删除和插入间隔比较小的情况下进行,那么B树的调整频率是非常高的。这样就会造成了时间的消耗,那么就需要下面的变种树B+、B*了。
在这里需要特别说明的一点是好多文章都写了B树和B-树,B树是一个搜索二叉树,B-树即上述描述的结构。这里是错误的,B树和B-树是同一种树,仅仅是翻译的问题,好多blog都这么写了,特此订正一下。
五、变种树介绍
1、B+树
B+树的定义
B+树整体和B树结构类似,是B树的变体,结点结构不一样,从而导致分裂操作不同。1、其内部结点结构和B树相同。
2、叶子结点最后一个指针为兄弟结点的指针,其他指针指向真正数据。
3、其次B+树中的内部结点都是关键字索引,所有数据都存储在叶子结点内。
4、B+树有两个头指针,分别是根结点的指针以及叶子结点最小关键字的指针。
分裂操作的不同
由于内部结点都是关键字索引,所有关键字都存储在叶子结点中,分裂时,不会将中间关键字提取的父 结 点,而是复制到父结点,中间关键字可以放到右 结 点中(这里任意,左右都可)。然后在父结点增加新结点的指针。B+树相对于B树的优点
1) B+-tree的磁盘读写代价更低B+-tree的内部结点并没有指向关键字具体信息的指针。因此其内部结点相对B 树更小。如果把所有同一内部结点的关键字存放在同一盘块中,那么盘块所能容纳的关键字数量也越多。一次性读入内存中的需要查找的关键字也就越多。相对来说IO读写次数也就降低了。
2) B+-tree的查询效率更加稳定
由于非终结点并不是最终指向文件内容的结点,而只是叶子结点中关键字的索引。所以任何关键字的查找必须走一条从根结点到叶子结点的路。所有关键字查询的路径长度相同,导致每一个数据的查询效率相当。
3)数据库索引采用B+树的主要原因是 B树在提高了磁盘IO性能的同时并没有解决元素遍历的效率低下的问题。正是为了解决这个问题,B+树应运而生。B+树只要遍历叶子结点就可以实现整棵树的遍历。而且在数据库中基于范围的查询是非常频繁的,而B树不支持这样的操作(或者说效率太低)。
2、B*树
B*树的定义
B*树是B+树的变体,在B+树的基础上,在内部结点增加指向兄弟结点的指针,其次,关键字个数至少是最大值的2/3。分裂操作的不同
既然结点结构发生变化那么,分裂操作相应的也会发生变化:
分裂时,先找相邻的兄弟结点,若兄弟结点未满,将一部分数据放到兄弟结点内,然后向结点插入关键字。若兄弟结点都为满结点时,在原结点和兄弟结点之间增加一个新结点,将原结点的1/3关键字放入到新结点,然后插入关键字。然后在父结点中增加新结点的指针。
B*树的优点
1、空间使用率提高。2、减少了分裂操作。















 2507
2507











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









