







注意:本章假设读者熟悉CMake、svn、make和C++编译链接等有基础知识的读者。
PCL为了方便Windows用户的安装,提供预编译的安装文件,但是只限于用户使用Visual Studio 2010 或Visual Studio 2008,如果用户采用其他编译器,或长期采用PCL作为开发平台,或者因为编译包不是对应最新的源代码,需要使用最新功能的用户,这些情况下就需要自己从源码安装。笔者建议初学者最好使用安装包安装方式,步骤较简单,简单几步即可体验PCL的强大。
准备工作:
a) 获取All in one安装包,PCL提供了配置为Visual Studio 2010的 32位和64位、 Visual Studio 2008的32位和64位下的该安装包,该包包含了PCL中所使用全部第三方编译包,除了Qt编译包;
b) 获取All in one包对应的PDB文件包,该包用于后期单步调试时使用;
c) 获取PCL源码包;
d) 安装开发工具Visual Studio 2010或Visual Studio 2008和cmake开发工具,需要cmake版本大于2.8.3,主要考虑到PCL中用到了高版本的一些宏定义,低版本不兼容。
注意:http://pointclouds.org/downloads/windows.html可下载all in one安装包和其对应的PDB文件包,源码包可在http://pointclouds.org/downloads/处下载。以上所有包都在参考文献【1】提供的光盘中含有。如果用户安装了RGBD相关设备驱动与中间件,则需要卸载OpenNI相关的驱动、中间件,避免与all in one提供的驱动与中间件冲突,如果没有,忽略此项,OpenNI、RGBD相关的内容后续章节IO有介绍。图1所示,为准备工作最终需要的文件。

1完成准备工作将会有三个包
安装:
安装过程很简单(笔者配置为Visual C++ 2008 Express Edition、Cmake 2.8.5、32位系统),点击安装上一步所准备的文件PCL-1.5.1-AllInOne-msvc2008-win32.exe。运行如图2到8,按照提示默认安装即可,如果需要改变安装路径到非C:盘,后面cmake配置时需要自行设置各个第三方库的路径以及PCL头文件与链接库路径。
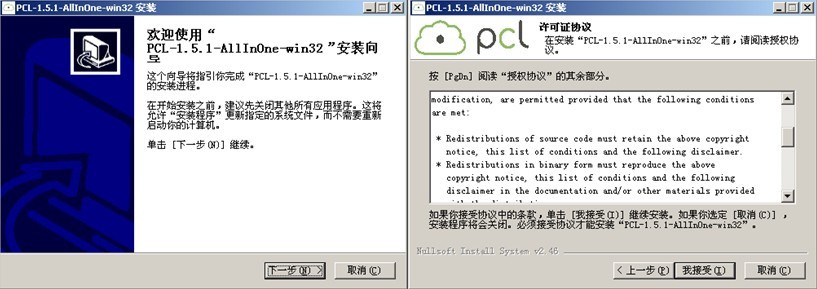
2欢迎使用界面与PCL许可界面

3安装选项与安装路径界面
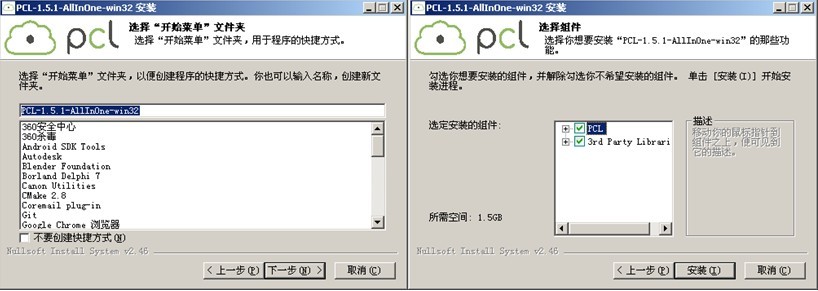
4选择开始菜单界面与安装组建库选择界面

5安装组建界面展开图示

6安装OpenNI界面

7安装Primesense Sensor驱动界面

8完成界面与最终安装好的截图

9第三方库文件夹

10 pdb文件夹中内容
测试安装是否成功:
建立两个文件,源程序文件project_inliers.cpp和cmake配置文件CMakeLists.txt内容拷贝链接http://pointclouds.org/documentation/tutorials/project_inliers.php#project-inliers中对应的代码及Cmakelists的代码(此处也可以从参考文献【1】中test文件拷贝对应的文件),放在同一文件夹source下,在source同一目录下建立camke-bin文件夹。

11 测试需要建立的文件
打开cmake,设置源文件目录与编译目录,如图12所示。

12设置cmake需要的路径
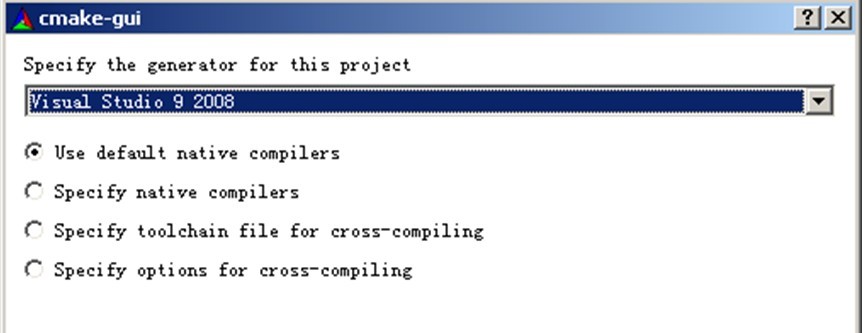
13 camke中选择对应的编译器
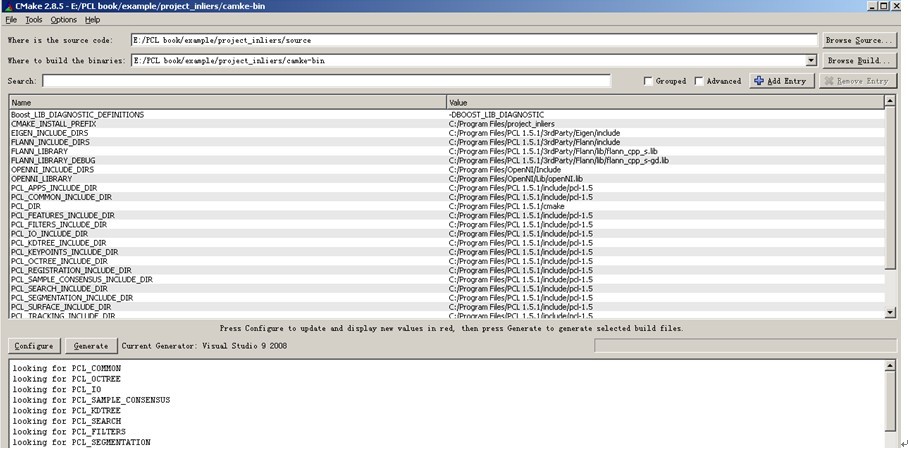
14 配置与生成
选择对应的编译器,如图13所示,笔者选择对应visual studio 9 2008,点击finish,再点击配置与生成,如图14所示,即可得到工程文件,如图15所示。
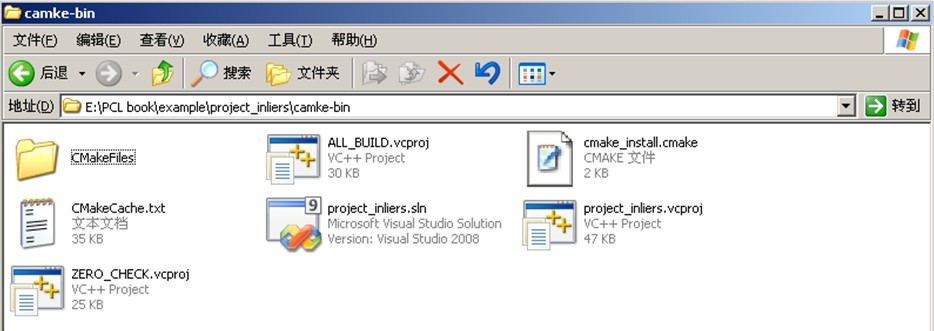
15生成的工程文件
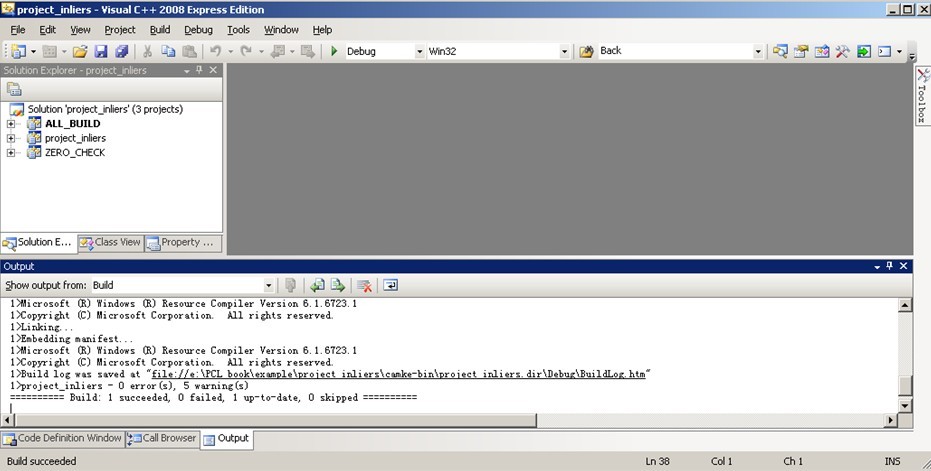
16编译工程文件

17 测试exe文件运行结果
到此就完成了PCL在windows上的开发环境搭建,用户可以自行体验官方网站提供的大量实例代码了,如果用户只是使用稳定的PCL版本。
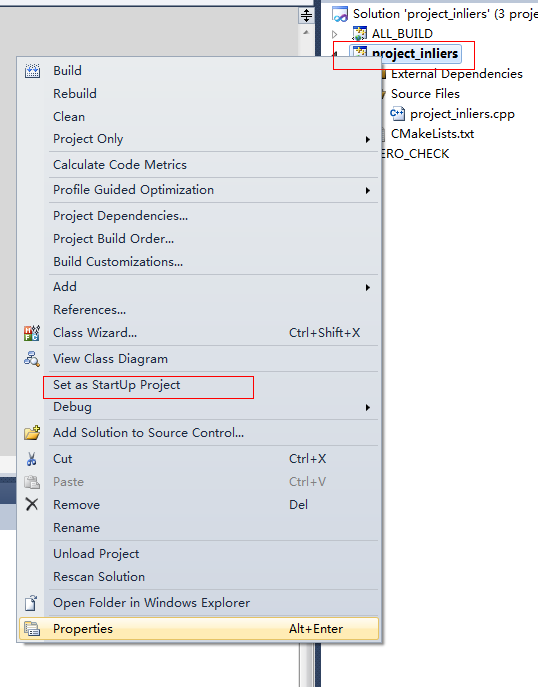
最后一步需要注意的是要将启动项目改为project_inlier,然后就可以启动了。















 1281
1281











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









