







 本文是边缘智能系列的下篇,介绍了如何在AWS S3 bucket中创建文件夹,并利用Jetson Nano、AWS IoT Greengrass部署机器学习模型。内容包括Jetson Nano的镜像烧录、SageMaker Neo runtime安装、Greengrass部署、Lambda函数配置,以及模型测试和云端集成。
本文是边缘智能系列的下篇,介绍了如何在AWS S3 bucket中创建文件夹,并利用Jetson Nano、AWS IoT Greengrass部署机器学习模型。内容包括Jetson Nano的镜像烧录、SageMaker Neo runtime安装、Greengrass部署、Lambda函数配置,以及模型测试和云端集成。

一、回顾
上一章我们通过Amazon SageMaker完成了边缘智能中的图像标注,模型训练和优化,最终将图像分类的SageMaker Neo模型导出到S3存储桶中。也就是我们完成了下图右下角阴影部分的内容。
本章重点分为两大部分:
- 设备端,主要包含:安装Jetson nano的镜像、SageMaker Neo runtime、Greengrass的部署、运行模型。
- 云端,主要包含:配置IoT core与Greengrass、开发与部署Lambda函数、model到设备端。
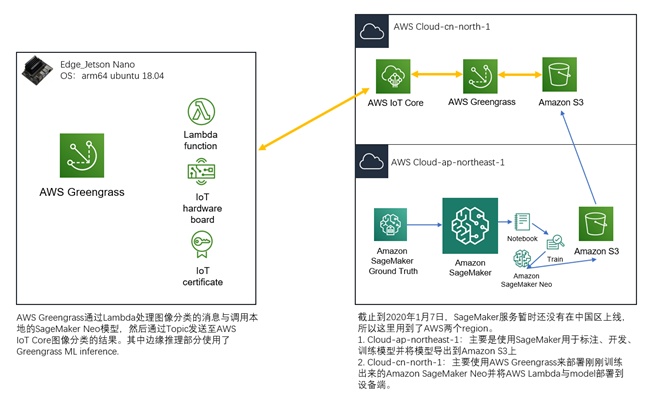
AWS EI image classification
二、Jetson Nano的镜像烧录
使用官方推荐的Etcher烧录镜像,不同的操作系统对应不同的操作方法,所以不再详细介绍,可以参考https://developer.nvidia.com/embedded/learn/get-started-jetson-nano-devkit#write,烧写成功后是如下图所示的基于aarch64-linux。
另外在使用CSI接口的摄像头时排线不要插反,并测试摄像头。
$ gst-launch-1.0 nvarguscamerasrc ! 'video/x-raw(memory:NVMM),width=3820, height=2464, framerate=21/1, format=NV12' ! nvvidconv flip-method=0 ! 'video/x-raw,width=960, height=616' ! nvvidconv ! nvegltransform ! nveglglessink -e可以顺利打开摄像头。代码的含义是使用GStreamer打开一个3820像素宽、2464像素高的相机stream,并在一个960像素宽、616像素高的窗口中显示它。

三、使用AWS IoT Greengrass部署模型到Jetson Nano
这个步骤我们做如下的事情:
- 3.1 安装SageMaker Neo runtime
- 3.2 安装AWS IoT Greengrass
- 3.3 配置和部署AWS Lambda
- 3.4 设置机器学习模型部署环境
- 3.5 部署机器学习模型Sagemaker Neo到边缘
- 3.6 启动模型并测试
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 147
147











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









