







简介:本文主要探讨了光伏发电系统中最大功率点跟踪(MPPT)技术的重要性,并深入研究了基于Boost电路的MPPT方法。通过MATLAB Simulink仿真,验证了MPPT算法的有效性并分析了系统性能。讨论了Boost电路的组成和工作原理,并介绍了常见的MPPT算法。在仿真过程中,详细说明了如何建立系统模型、选择MPPT算法、设定参数,并对仿真结果进行了分析和讨论,以便于设计和优化光伏系统。 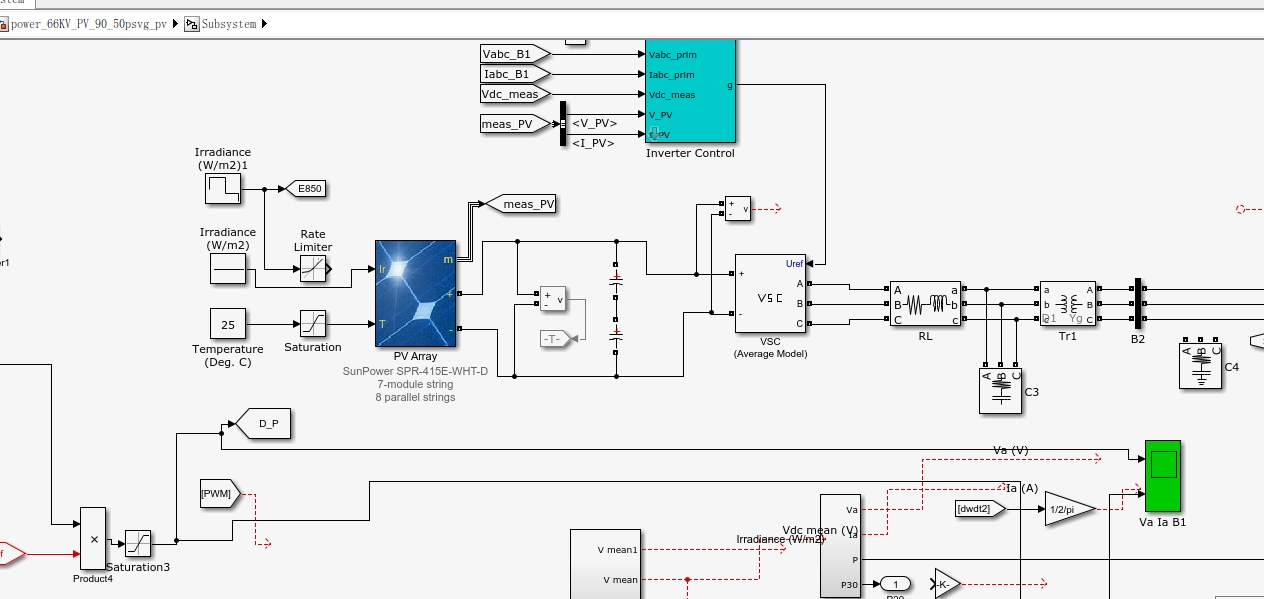
1. 光伏发电系统中的MPPT技术
光伏发电系统的核心目标之一是最大化能量捕获。最大功率点跟踪(MPPT)技术是实现这一目标的关键手段,它能够确保光伏系统始终运行在最佳的功率输出状态。MPPT通过实时调整光伏阵列的工作点,来应对光照强度和温度的不断变化,从而提高能量转换效率。
本章将首先介绍MPPT技术的基本概念,并探讨其在光伏系统中的重要性。随后,将详细解析几种常见的MPPT算法,包括它们的工作原理、优缺点,以及如何在实际的光伏发电系统中实现和优化这些算法。通过深入分析,本章旨在为读者提供一个全面的理解框架,使他们能够深入掌握MPPT技术,并应用于提升光伏系统的整体性能。
2. Boost电路的工作原理和组成
2.1 Boost电路的基本概念
2.1.1 Boost电路的定义和功能
Boost电路,又称为升压转换器,是电力电子技术中广泛使用的一种DC-DC转换器。它的主要功能是将较低的输入电压转换为较高的输出电压。这种转换器具有高效率和高功率密度的特点,使其在可再生能源,尤其是光伏发电系统中应用广泛。Boost电路的关键特性是,不管负载如何变化,都能够提供一个恒定的、可调的输出电压,这在许多应用中都是一个重要的需求。
Boost电路通常由一个开关元件(通常是MOSFET或IGBT)、一个电感、一个二极管和一个输出电容组成。其工作原理是通过控制开关元件的导通和关断,利用电感储存和释放能量,从而实现电压的升压。
2.1.2 Boost电路的工作模式分析
Boost电路具有两种主要的工作模式:连续导通模式(CCM)和不连续导通模式(DCM)。在CCM模式下,电感中的电流永远不会降至零,电感始终有电流流动。而在DCM模式下,电感电流会在每个周期内降至零,这种模式下电感的利用率降低,效率相对较低。
CCM模式中,Boost电路的工作过程可以分为三个阶段:开关元件导通期间的能量储存阶段、开关元件关断期间的能量释放阶段以及二极管续流阶段。在开关元件导通时,输入电压通过电感储存能量;当开关元件关断时,电感中的能量通过二极管转移到负载上,同时电容为负载提供连续的电流。
2.2 Boost电路的组成元件
2.2.1 主要元件的选型和作用
在设计Boost电路时,各个元件的选型至关重要,它们直接影响电路的性能和效率。
-
开关元件 :这是控制电路能量流动的关键部分,通常采用MOSFET,因为它具有较低的导通电阻和较短的开关时间。开关元件的主要作用是控制电感的充电和放电周期。
-
电感 :电感是能量的临时存储器,它在开关元件导通时储存能量,在开关元件关断时释放能量。电感的大小直接影响电路的纹波电流和需要的电流应力。
-
二极管 :在传统的Boost电路中,二极管用于防止电感和输出端之间的电流倒流,但现在更多使用同步整流技术,即用MOSFET代替二极管,以减少损耗并提高效率。
-
输出电容 :输出电容的主要作用是平滑输出电压,减少输出电压的纹波。这要求电容具有足够大的电容值以及良好的温度和频率特性。
2.2.2 控制策略和元件协同工作原理
Boost电路的控制策略通常依赖于PWM(脉冲宽度调制)信号来控制开关元件的导通和关断,从而调整输出电压。控制器需要准确计算并生成合适的PWM信号,以确保电路高效稳定地工作。
元件之间的协同工作原理可以这样描述:当开关元件导通时,输入电压对电感进行充电,并同时为负载提供电流。电感储能逐渐增加,直到开关元件关闭。在开关元件关闭期间,电感开始放电,其储存的能量通过二极管(或同步整流MOSFET)转移到负载和输出电容上。这个过程不断循环,维持输出电压的稳定。
在设计和分析Boost电路时,需要考虑元件的动态特性和电路的工作条件。使用MATLAB Simulink等工具可以对电路进行建模和仿真,进而优化设计。接下来的章节将深入探讨如何通过仿真分析Boost电路,并构建系统模型。
3. 常见的MPPT算法介绍
3.1 算法概述和分类
3.1.1 MPPT算法的基本原理
MPPT(Maximum Power Point Tracking,最大功率点跟踪)技术是光伏发电系统中至关重要的部分,它确保光伏阵列能够在任何环境条件下都工作在最大功率点上。MPPT算法的基本原理是通过调节光伏阵列的负载,使得光伏阵列的输出电压和电流的乘积始终处于最大值状态。
为了实现这一目标,MPPT算法需要实时监测光伏阵列的输出电压和电流,通过算法计算出当前环境下的最大功率点,并调整负载阻抗,使得光伏阵列工作在该点上。这个过程是动态的,因为光照强度、温度等环境因素的改变会导致最大功率点发生变化。
3.1.2 主要算法类型和应用场景
MPPT算法有很多类型,根据实现方式和适应环境的不同,主要可以分为以下几类:
- 比值法(Perturb and Observe,P&O):P&O是最简单的MPPT技术之一,通过周期性地扰动光伏阵列的输出电压,观察功率变化方向来调整工作点。
- 电导增量法(Incremental Conductance,IC):IC法通过计算当前工作点的电导和电导增量来确定最大功率点,准确性比P&O高。
- 分数开路/短路电流法(Fractional Open-Circuit Voltage/Short-Circuit Current,FOCV/FSCC):此方法基于光伏阵列V-I特性曲线,通过测量开路电压或短路电流与最大功率点的关系来确定工作点。
- 自适应扰动法:该方法结合了P&O和IC的特点,动态调整扰动步长以快速达到最大功率点,同时减少振荡。
这些算法各有其特点,适用于不同的应用场景,例如:
- P&O算法因其简单易实现,被广泛用于小型和中等规模的光伏发电系统。
- IC算法由于其较高的精度,适用于对精度有要求的大规模光伏系统。
- FOCV/FSCC方法适用于快速变化的环境,如太阳云层快速移动的情况。
3.2 典型MPPT算法详解
3.2.1 比值法(P&O)
比值法(Perturb and Observe,P&O)是最经典的MPPT算法之一,其基本工作流程如下:
- 初始扰动:设定一个初始的工作点,并对光伏阵列的输出电压或电流施加一个小的扰动。
- 观察功率变化:等待系统稳定后,记录扰动前后的功率变化。
- 决策调整:如果扰动后功率增大,继续相同的扰动方向;如果功率减小,则反向扰动。
- 循环迭代:重复上述步骤,直到达到最大功率点或满足设定的停止条件。
代码实现P&O算法的一个简化版示例:
// P&O MPPT Simplified Example Code
float V_prev, P_prev; // Previous voltage and power values
float V_next, P_next; // Next voltage and power values
float V_step = 0.1; // Perturbation step size
void PnO_MPPT() {
do {
V_prev =光伏阵列当前电压;
P_prev = V_prev * 光伏阵列当前电流; // 计算当前功率
V_next = V_prev + (P_prev < P_prev ? -1 : 1) * V_step; // 根据功率变化决定扰动方向
// 以下代码省略,实际应用中需要读取新的电压值和计算功率值
} while (计算功率变化方向与扰动方向是否一致);
}
在上述代码中,我们初始化前一次的电压和功率值,并进行了一次扰动。之后通过比较功率的变化来决定是否改变扰动方向。这个过程会持续进行,直到功率不再增加为止。
3.2.2 电导增量法(IC)
电导增量法(Incremental Conductance,IC)的工作原理基于光伏阵列的V-I特性曲线,当阵列工作在最大功率点时,其导数dI/dV为-1/V。IC法可以实现无振荡的MPPT,主要步骤如下:
- 测量当前电压V和电流I,以及它们的变化率dV和dI。
- 根据V、I和它们的变化率计算电导G和电导增量dG。
- 判断是否满足最大功率点条件:G + dG = 0。
- 若条件满足,工作点即为最大功率点;若不满足,根据电导增量的正负调整工作点。
以下是一个电导增量法的伪代码示例:
// Incremental Conductance MPPT Pseudo Code
float V, I, dV, dI; // Current voltage, current, and their derivatives
float G, dG; // Conductance and incremental conductance
void IC_MPPT() {
// 初始电压设定,以及初始导数设定
V = 初始电压;
dV = 0;
I = 光伏阵列当前电流;
dI = 0;
while (true) {
// 更新导数
dV = V - 上一次的V;
dI = I - 上一次的I;
G = I / V; // 计算当前电导
dG = (I + 上一次的I) - (V + dV - 上一次的V); // 计算增量电导
if (dG + G == 0) { // 判断是否处于最大功率点
break; // 达到最大功率点
} else if (dG + G < 0) {
V += V_step; // 增加电压
} else {
V -= V_step; // 减小电压
}
// 读取新的电压和电流值以备下次循环使用
}
}
在这个例子中,我们使用电压的微分变化dV和电流的微分变化dI来计算电导G和增量电导dG。通过比较G和dG的和与零的关系,我们能够判断当前的工作点是否为最大功率点,并据此调整电压来追踪最大功率。
3.2.3 其他MPPT算法的特点和适用性
除了P&O和IC这两种主流的MPPT算法外,还有一些其他算法,它们具有不同的特点和适用性。例如:
- FOCV/FSCC算法,主要依赖于开路电压和短路电流的测量,适用于快速环境变化的场合。
- 自适应扰动法,结合了P&O的易实现性和IC的高精度性,能够根据系统实时反应调整扰动步长。
这些算法各有优缺点,选择合适的算法通常取决于光伏系统的规模、环境条件、以及对系统效率和稳定性的要求。在实际应用中,可能需要根据具体情况进行算法的优化和调整,以达到最佳的MPPT效果。
在选择MPPT算法时,工程师通常需要考虑光伏系统的实际工作环境、成本、以及所期望的性能。例如,对于成本敏感的小型系统,可能会偏向选择P&O算法;而对于要求高精度和高效率的大规模系统,则可能会选择IC算法或其它更为先进的算法。此外,实际应用中也可能会结合多种算法的优点,开发出更适应特定应用需求的混合MPPT技术。
4. MATLAB Simulink仿真分析
4.1 MATLAB Simulink简介
4.1.1 Simulink的功能和特点
Simulink是MATLAB的一款强大的多领域仿真和模型设计软件包。它允许工程师在图形化的界面中构建模型,这些模型可以通过拖放的方式组成一个动态系统。Simulink不仅仅是一个简单的仿真工具,它还提供了一个全面的集成环境,用户可以在其中进行系统级的设计和分析。
Simulink最显著的特点之一是其跨学科的能力,允许用户在同一个环境中模拟控制、信号处理、通信和电力电子等多个系统的动态行为。它提供了一系列内置的模块,可用于模拟各种物理系统,如机械、热、流体以及电子系统。另外,Simulink还支持通过MATLAB代码、Fortran代码以及C/C++代码等来创建自定义模块。
4.1.2 Simulink在电力电子中的应用
在电力电子领域,Simulink被广泛用于设计和仿真电子电路、逆变器、变频器以及能源管理系统等复杂系统。它能够模拟系统的动态行为,并且可以在模型中直接集成控制策略,如PID控制器、模糊逻辑控制器、神经网络控制器等。通过仿真,工程师能够在实际构建和测试硬件之前,评估系统的性能。
Simulink还提供了强大的工具来进行系统级优化,比如Simulink Design Optimization工具箱,它能够帮助工程师进行参数调优、灵敏度分析和多目标优化。在电力电子系统中,这可以帮助优化开关频率、减少能量损耗以及提高整个系统的能效和可靠性。
4.2 仿真模型构建
4.2.1 模型搭建步骤和组件设置
构建一个准确的仿真模型需要几个明确的步骤。首先,需要确定仿真的目标和要求,这包括确定仿真的精度、仿真时间范围以及系统的关键性能指标。其次,基于这些要求选择合适的模块和配置参数。
在Simulink中构建光伏MPPT系统的模型,首先需要添加相应的光伏模块,例如太阳能电池板模型,然后是电力电子模块,比如用于MPPT的Boost转换器。接着,是控制算法的实现,比如P&O或者IC算法。
每个组件的设置要根据实际系统参数进行配置。例如,太阳能电池板模型的设置需要依赖于太阳辐射强度、温度等环境因素和电池本身的I-V特性。转换器的开关频率和滤波器参数也需要根据实际应用调整。控制算法的参数设置则需要基于稳定性要求和动态响应考虑进行优化。
4.2.2 参数设置和模型调试技巧
参数设置是确保仿真结果准确性和有效性的关键步骤。首先,应当基于实际硬件的设计参数或者经验数据来初始化仿真模型中的参数值。随后,在仿真过程中对这些参数进行微调,以达到最佳的仿真效果。
模型调试是一个迭代过程,可能需要反复运行仿真,观察结果,并根据结果调整参数。Simulink提供了一系列的调试工具,如示波器、探针、断点等,帮助用户在仿真运行中检查各个点的状态。
调试时要特别注意以下几点: - 检查组件之间的接口是否正确连接,并确保所有的物理量单位一致。 - 确认所有控制算法的逻辑是否正确实现,可以使用MATLAB的工作空间来查看和调整变量。 - 分析系统的稳定性和瞬态响应,确保仿真的过程符合实际物理规律。 - 对于关键性能指标,如功率、效率等,进行对比分析,确认仿真结果的可信度。
为了提高调试效率,可以使用Simulink中的“快速仿真”选项,此功能可以在不影响结果精度的前提下,加速仿真过程。另外,对于复杂系统,采用分层次的建模策略可以极大地简化调试过程,先单独测试各个子系统,再将它们组合起来进行整体测试。
通过以上步骤的详细介绍,本章内容向读者展示了如何通过MATLAB Simulink进行光伏MPPT系统的建模和仿真。下一章将介绍如何在Simulink中构建光伏组件的仿真模型,并深入到Boost电路的仿真模型搭建过程中。
5. 系统模型构建方法
5.1 光伏组件模型的建立
构建精确的光伏组件模型是进行系统仿真的基础。光伏组件的模型通常包括电池单体的等效电路模型,以及从电池单体到整个光伏阵列的特性参数提取。
5.1.1 光伏电池的等效电路模型
光伏电池的等效电路模型是一个二极管模型,通常包含一个电流源、一个二极管以及串联和并联电阻。该模型可以用来描述电池的电压-电流关系(I-V特性),以及在不同光照和温度下的性能。
模型方程如下:
[ I = I_{ph} - I_0 \left( \exp \left( \frac{V + IR_s}{nV_t} \right) - 1 \right) - \frac{V + IR_s}{R_{sh}} ]
其中: - (I) 是电池输出电流; - (I_{ph}) 是光生电流; - (I_0) 是电池的反向饱和电流; - (V) 是电池输出电压; - (R_s) 是串联电阻; - (R_{sh}) 是并联电阻; - (n) 是二极管的理想因子; - (V_t) 是热电压,计算公式为 (V_t = \frac{N_k T}{q}),其中 (N_k) 是玻尔兹曼常数,(T) 是绝对温度,(q) 是电荷量。
5.1.2 光伏电池特性参数提取
在实际应用中,需要通过实验数据来提取电池的特性参数。参数提取通常包括以下步骤:
- 在标准测试条件下(如AM1.5,25℃)获取I-V曲线。
- 使用最小二乘法等数值拟合技术,根据实验数据反推模型参数。
- 通过模型仿真与实验结果对比验证参数的准确性。
5.2 Boost电路的仿真模型搭建
Boost电路是MPPT算法实施的重要环节,其性能直接影响整个光伏系统的效率。仿真模型搭建主要关注电路参数的确定和控制器的设计。
5.2.1 电路参数的确定和输入输出特性分析
电路参数确定需要基于实际应用场景的特定要求。Boost电路的关键参数包括:
- 输入电压范围。
- 输出电压目标值。
- 电感值,影响纹波电流和稳定性。
- 输出电容值,影响输出电压纹波。
- 开关频率,影响效率和尺寸。
输入输出特性分析是通过搭建电路仿真模型,使用如MATLAB/Simulink等工具进行仿真的关键部分,目的是为了分析电路在不同输入条件下的响应特性。
5.2.2 控制器的设计和仿真验证
控制器设计包括补偿网络的设计、控制策略的选择等。常见的控制策略有电压模式控制和电流模式控制。在设计控制器时,需要对以下方面进行考量:
- 稳态误差和稳态性能。
- 动态响应速度和超调量。
- 系统稳定性分析。
仿真验证是通过模拟不同的工作场景,例如负载变化、输入光照强度变化等,观察系统是否能稳定工作,控制器是否能有效地调节输出电压和电流以满足设定目标。
利用如下的MATLAB/Simulink仿真示例,对Boost电路进行建模和仿真分析:
% 参数定义
Vin = 12; % 输入电压
Vo = 24; % 输出电压
L = 1e-3; % 电感值
C = 1e-4; % 电容值
Io = 5; % 输出电流
% Boost电路模型
model = 'Boost_Circuit'; % 模型名称
open_system(model); % 打开仿真模型
% 仿真设置
set_param(model, 'StopTime', '0.05'); % 仿真时长
% 运行仿真
sim(model);
% 输出结果分析
Vo_output = simout; % 获取输出电压仿真数据
仿真模型中的 Boost_Circuit 是一个预先搭建好的Simulink模型,能够展示Boost电路在不同工作条件下的动态行为。
通过上述建模和仿真的方法,可以全面评估Boost电路在光伏系统中MPPT算法下的性能表现,为实际的硬件设计和算法优化提供理论依据。
6. MPPT算法性能比较和系统参数优化
MPPT(Maximum Power Point Tracking)算法的性能评估是光伏系统设计中的关键环节,它直接影响着系统的整体效率和稳定性。本章我们将深入探讨如何在MATLAB Simulink环境下进行MPPT算法的仿真性能评估,并探讨系统参数优化的策略。
6.1 MPPT算法仿真性能评估
6.1.1 不同算法的效率对比
在比较不同MPPT算法的效率时,我们可以基于几个关键性能指标,如追踪速度、精度、稳定性和计算复杂度。由于环境因素(如温度、光照强度)和负载特性会对MPPT算法的表现产生影响,因此模拟中需要设定不同的环境和负载情景来进行综合评估。
- 追踪速度 :衡量算法能够多快地找到最大功率点。
- 追踪精度 :算法找到的最大功率点与实际最大功率点的接近程度。
- 稳定性 :算法在一定周期内维持最大功率点的稳定性。
- 计算复杂度 :算法实现的复杂程度,影响硬件资源的需求和成本。
6.1.2 动态响应和稳定性分析
动态响应是指在环境条件变化时,MPPT算法能够多快做出反应并重新定位到最大功率点。这一性能指标通常通过设置环境参数(如光照强度和温度)的突变来模拟,观察系统跟踪最大功率点的恢复时间。
- 恢复时间 :从环境参数变化到MPPT算法再次稳定在最大功率点所需的时间。
- 超调和振荡 :在动态变化过程中,算法的表现是否出现超调或是振荡现象。
为了更好地展示这一评估过程,我们可以通过以下步骤来构建一个基于MATLAB Simulink的仿真模型:
- 定义环境变化条件,例如光照强度的阶跃函数。
- 在Simulink中搭建光伏系统和MPPT算法的仿真模型。
- 运行仿真,并记录不同MPPT算法的表现数据。
- 分析数据,对比算法的动态响应性能。
6.2 系统参数优化策略
6.2.1 参数敏感性分析和调整方法
参数敏感性分析是评估系统对特定参数变化的敏感程度,并据此优化参数的方法。对于MPPT算法而言,一些关键参数包括步长大小、采样频率和滤波器的截止频率等。通过改变这些参数并观察MPPT性能的变化,我们可以确定对系统性能影响最大的参数,并进行针对性的调整。
- 步长大小 :影响追踪速度和精度,步长过大可能导致算法无法精确定位到最大功率点,而步长过小则会降低追踪速度。
- 采样频率 :决定了系统对环境变化的响应速度,过低会导致系统无法及时响应环境变化。
- 滤波器截止频率 :滤除噪声,影响系统稳定性,过高或过低都可能引入噪声或导致系统响应迟钝。
6.2.2 多目标优化和系统效率提升
多目标优化是在考虑多种性能指标的情况下,找到一个或多个最佳参数组合的过程。在这个过程中,我们通常会使用一些优化算法,如遗传算法、粒子群优化等,来实现对MPPT系统参数的优化。
- 遗传算法 :模拟自然选择和遗传机制的搜索算法,通过迭代进化找到最优解。
- 粒子群优化(PSO) :模拟鸟群捕食行为,通过粒子间的协作和信息共享来优化参数。
通过MATLAB的全局优化工具箱,我们可以设置目标函数和约束条件,利用这些优化算法对MPPT系统的多个参数进行同步优化,以达到提升系统效率的目的。
系统效率的提升不仅仅依赖于MPPT算法的性能,还需要考虑系统的整体设计。因此,在实际应用中,还需从光伏组件的选择、Boost电路的设计等多方面综合考量。
6.2.3 代码示例与参数分析
以比值法(Perturb and Observe, P&O)MPPT算法为例,在MATLAB中实现该算法的函数可能如下:
function [Vm, Im, Pm, Vp, Ip] = PnO(V, I, dV, dI, step_size)
% V - 当前电压
% I - 当前电流
% dV - 电压扰动量
% dI - 电流扰动量
% step_size - MPPT算法步长
% Vm, Im - 最大功率点的电压和电流
% Pm - 最大功率点的功率
% Vp, Ip - 上一次的电压和电流
% 计算当前功率
P = V .* I;
% 判断功率变化方向并进行相应的扰动
if (P > Pm)
Vp = V; Ip = I;
V = V + dV;
else
Vp = V; Ip = I;
V = V - dV;
end
% 更新最大功率点信息
Pm = max(P);
Vm = V;
Im = I;
% 如果步长过小或者超过一定迭代次数,停止扰动
if (step_size < STEP_SIZE_MIN || count > ITERATION_LIMIT)
V = Vp;
I = Ip;
end
end
在上述代码中, step_size 是MPPT算法的关键参数,决定了算法的追踪速度和精度。参数的合理选择能够显著影响到MPPT算法的表现。
在实际应用中,我们可能需要对不同的参数组合进行多次仿真测试,然后根据测试结果调整参数,以此实现最佳的系统性能。
6.2.4 系统参数优化的可视化展示
在进行参数优化时,我们可以使用MATLAB的绘图功能,将不同参数组合下的系统性能以图形的方式直观地展示出来。例如,我们可以绘制一个参数敏感性分析图,展示系统性能随参数变化的情况:
% 假设我们已经得到了一系列的P&O算法的性能数据
step_sizes = [0.01, 0.02, 0.03, 0.04, 0.05]; % 步长大小
efficiencies = [0.85, 0.87, 0.90, 0.88, 0.86]; % 转换效率
plot(step_sizes, efficiencies, '-o');
xlabel('Step Size');
ylabel('Efficiency');
title('MPPT Algorithm Efficiency vs. Step Size');
grid on;
通过这样的图表,我们可以清晰地看到不同步长大小对系统效率的影响,从而指导我们选择最佳的参数设置。
通过系统参数优化,MPPT算法能够更好地适应不同的环境变化,提升整个光伏系统的能量捕获能力,实现更高的能量转换效率。
7. 光伏系统效率和稳定性提升
光伏系统效率和稳定性是评估光伏电站性能的两个关键指标。效率的提高意味着在相同的光照条件下能够产生更多的电能,而稳定性则关系到系统能否长期可靠地运行。在本章节中,我们将探讨提升光伏系统效率和稳定性的策略和措施。
7.1 光伏系统效率优化措施
7.1.1 提高MPPT跟踪精度的方法
最大化光伏功率点跟踪(MPPT)算法的精度是提高系统效率的关键。提高MPPT精度可以通过以下几种方式实现:
- 算法优化 :通过改进MPPT算法,例如,采用混合型MPPT算法,结合P&O和IC的优点,可以在不同光照条件下都保持较高的跟踪精度。
- 预测控制 :利用天气预报数据,预测未来光照变化,提前调整MPPT算法的工作点,减少跟踪偏差。
- 自适应调节 :根据系统历史运行数据,动态调整MPPT算法的参数,如步长大小,以适应环境变化。
% 示例:自适应步长调整的MATLAB代码
% 假设已有的MPPT算法函数mpptAlg为
% function [V_mpp, I_mpp, P_mpp] = mpptAlg(Voltages, Currents)
% 此处为自适应步长调整部分的伪代码
initial_step = 0.01; % 初始步长
max_step = 0.1; % 最大步长
min_step = 0.001; % 最小步长
current_step = initial_step;
for i = 1:length(Voltages)
[V_mpp, I_mpp, P_mpp] = mpptAlg(Voltages(i), Currents(i));
% 计算功率增量
delta_power = P_mpp - previous_power;
if delta_power > 0
% 增加步长
current_step = min(current_step * 1.1, max_step);
else
% 减小步长
current_step = max(current_step * 0.9, min_step);
end
previous_power = P_mpp;
end
7.1.2 环境影响因素的考量和适应性优化
环境因素,如温度、光照强度、尘埃覆盖等,对光伏电池性能有直接影响。为了优化系统效率,需要针对这些因素进行考量:
- 温度补偿 :温度的变化会影响光伏电池的开路电压和工作点,通过引入温度补偿机制可以提高MPPT的准确性。
- 自清洁系统 :定期清理光伏面板上的尘埃可以减少能量损失,提高系统的整体效率。
7.2 光伏系统稳定性保障
7.2.1 面对极端天气的系统适应性分析
极端天气如暴风雨、雪灾等会对光伏系统产生严重影响,因此需要采取措施以确保系统的稳定性:
- 机械结构加固 :加强支架和安装结构的设计,确保其能够承受极端天气条件下的风载和雪载。
- 电气元件保护 :使用防护等级高的电气元件,并做好防潮、防雷击措施。
7.2.2 系统监控和故障诊断技术
实时监控和故障诊断是保障系统稳定运行的重要手段,主要措施包括:
- 实时监控系统 :安装传感器收集温度、湿度、电压、电流等数据,通过无线网络传输至监控中心。
- 故障预测和诊断 :采用数据挖掘和机器学习方法对历史数据进行分析,预测潜在的故障并及时处理。
graph TD
A[开始监控] --> B[数据采集]
B --> C[数据传输]
C --> D[数据分析]
D -->|无异常| E[常规运行]
D -->|潜在故障| F[故障预测]
F --> G[警报通知]
G --> H[故障诊断]
H -->|确认故障| I[维修/更换部件]
H -->|误报| J[调整预测模型]
通过上述的章节内容分析,我们探讨了提升光伏系统效率和稳定性的方法,包括精确的MPPT跟踪、环境适应性设计、极端天气防护措施、以及实时监控和故障诊断技术。这些措施可以有效地提升整个系统的性能,保障光伏电站的稳定可靠供电。在实际应用中,结合具体项目的实际情况进行系统性的设计和优化,才能达到最佳效果。
简介:本文主要探讨了光伏发电系统中最大功率点跟踪(MPPT)技术的重要性,并深入研究了基于Boost电路的MPPT方法。通过MATLAB Simulink仿真,验证了MPPT算法的有效性并分析了系统性能。讨论了Boost电路的组成和工作原理,并介绍了常见的MPPT算法。在仿真过程中,详细说明了如何建立系统模型、选择MPPT算法、设定参数,并对仿真结果进行了分析和讨论,以便于设计和优化光伏系统。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









