







 文章介绍了增量式PID控制算法在三菱FX2NPLC中的应用,通过避免误差积累和使用逻辑判断限制故障输出,提高了系统稳定性和控制效果。程序流程包括参数整定和初始化,实验证明该方法能有效减少超调。
文章介绍了增量式PID控制算法在三菱FX2NPLC中的应用,通过避免误差积累和使用逻辑判断限制故障输出,提高了系统稳定性和控制效果。程序流程包括参数整定和初始化,实验证明该方法能有效减少超调。
在工业生产中,常需要采用闭环控制方式来控制温度、压力、流量等连续变化的模拟量。无论是使用模拟控制器的模拟控制系统,还是使用计算机的数字控制系统,PID控制器都得到了广泛的应用。这是因为这种方法不需要精确的控制系统数学模型,有较强的灵活性和适应性。但是在数字PLC控制系统中,普通的PID算法对所有过去状态存在依赖性,从而引起系统较大的超调,使系统稳定性下降。增量式PID控制算法每次输出只输出控制增量,必要时可通过逻辑判断限制故障时的输出,从而降低了因机器故障导致PID误输出给系统带来严重后果的影响。
在实际系统中,PLC控制模拟量可采用PLC自带的PID过程控制模块,但对要求比较高的场合采用改进的PID控制算法,就必须由用户自己编制PID控制算法,基于这些问题的考虑,文中介绍一种由三菱FX2N实现的增量式PID控制器的设计方法。
1 控制原理
1.1 PID控制原理
PLC的PID控制器的设计是以连续系统的PID控制规律为基础,将其数字化,写成离散形式的PID控制方程,再根据离散方程进行控制程序设计。
在连续系统中,典型的PID闭环控制系统如图1所示,图中sp(t)是给定值,pv(t)为反馈量,c(t)为系统的输出量。
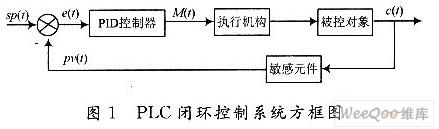
PID控制器的输入/输出关系式为:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









