







 本文介绍了最短路径计算的三种算法:Dijkstra算法、A*算法和D*算法。Dijkstra算法适用于静态环境,A*算法是静态路网中最有效的启发式算法,而D*算法则是动态环境下的寻路利器。文章通过实例展示了这些算法的工作原理和效率,并提供了代码实现的讨论和修正。
本文介绍了最短路径计算的三种算法:Dijkstra算法、A*算法和D*算法。Dijkstra算法适用于静态环境,A*算法是静态路网中最有效的启发式算法,而D*算法则是动态环境下的寻路利器。文章通过实例展示了这些算法的工作原理和效率,并提供了代码实现的讨论和修正。
据 Drew 所知最短路经算法现在重要的应用有计算机网络路由算法,机器人探路,交通路线导航,人工智能,游戏设计等等。美国火星探测器核心的寻路算法就是采用的D*(D Star)算法。
最短路经计算分静态最短路计算和动态最短路计算。
静态路径最短路径算法是外界环境不变,计算最短路径。主要有Dijkstra算法,A*(A Star)算法。
动态路径最短路是外界环境不断发生变化,即不能计算预测的情况下计算最短路。如在游戏中敌人或障碍物不断移动的情况下。典型的有D*算法。
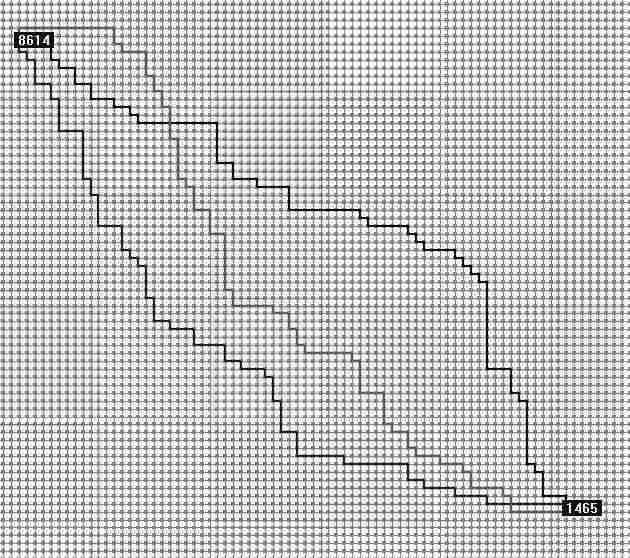
这是Drew程序实现的10000个节点的随机路网三条互不相交最短路
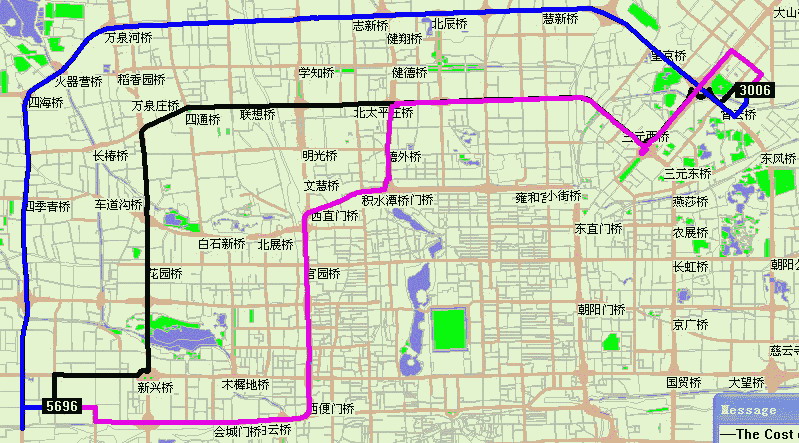
真实路网计算K条路径示例:节点5696到节点3006,三条最快速路,可以看出路径基本上走环线或主干路。黑线为第一条,兰线为第二条,红线为第三条。约束条件系数为1.2。共享部分路段。 显示计算部分完全由Drew自己开发的程序完成。
Dijkstra算法求最短路径:
Dijkstra算法是典型最短路算法,用于计算一个节点到其他所有节点的最短路径。主要特点是以起始点为中心向外层层扩展,直到扩展到终点为止。Dijkstra算法能得出最短路径的最优解,但由于它遍历计算的节点很多,所以效率低。
Dijkstra算法是很有代表性的最短路算法,在很多专业课程中都作为基本内容有详细的介绍,如数据结构,图论,运筹学等等。
Dijkstra一般的表述通常有两种方式,一种用永久和临时标号方式,一种是用OPEN, CLOSE表方式,Drew为了和下面要介绍的 A* 算法和 D* 算法表述一致,这里均采用OPEN,CLOSE表的方式。
大概过程:
创建两个表,OPEN, CLOSE。
OPEN表保存所有已生成而未考察的节点,CLOSED表中记录已访问过的节点。
1. 访问路网中里起始点最近且没有被检查过的点,把这个点放入OPEN组中等待检查。
2. 从OPEN表中找出距起始点最近的点,找出这个点的所有子节点,把这个点放到CLOSE表中。
3. 遍历考察这个点的子节点。求出这些子节点距起始点的距离值,放子节点到OPEN表中。
4. 重复2,3,步。直到OPEN表为空,或找到目标点。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1151
1151

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









