







简介:Canny边缘检测算法是计算机视觉中用于提取图像清晰边缘的重要技术。通过使用高斯滤波去除噪声、计算梯度强度和方向来标识边缘、应用非极大值抑制消除虚假边缘、双阈值检测以确保边缘连续性和稳定性,并通过后处理步骤连接边缘,最终使用Matlab中的 edge 函数实现边缘检测。Canny滤波器广泛应用于机器人导航、自动驾驶和医学影像分析等领域。 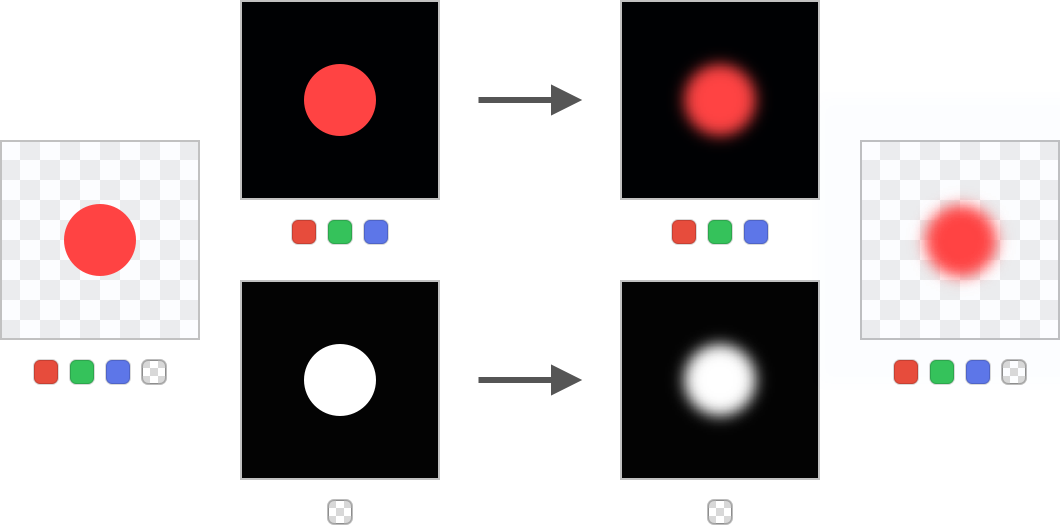
1. Canny边缘检测算法概述
边缘检测作为图像处理领域的一项基础而重要的任务,其在目标识别、形状分析、图像分割等方面具有关键作用。Canny边缘检测算法因其优异的边缘检测性能和鲁棒性,被广泛应用于计算机视觉和图像分析领域中。
Canny算法的核心思想是利用高斯滤波消除噪声,通过计算图像梯度强度和方向进行边缘候选点的选取,随后通过非极大值抑制精确边缘位置,并使用双阈值策略连接断开的边缘。该算法致力于达到三个主要目标:高检测率、良好的定位准确性和最小化检测到的边缘点响应。
Canny边缘检测算法的步骤可以分为以下几个阶段:图像预处理、边缘点检测、边缘细化与连接、以及最终边缘的表示。在实际应用中,Canny算法能够适应各种复杂场景,其性能很大程度上取决于各阶段的处理和参数选择。接下来的章节将详细介绍各个阶段的工作原理和实现细节。
2. 高斯滤波去噪原理
2.1 高斯滤波的基础知识
2.1.1 高斯函数的数学原理
高斯函数是一个以数学家卡尔·弗里德里希·高斯命名的概率分布函数,其在图像处理中表现为一个数学模型,用于信号的平滑处理。在二维空间中,高斯函数可以表示为:
[ G(x,y) = \frac{1}{2\pi\sigma^2} e^{-\frac{x^2 + y^2}{2\sigma^2}} ]
其中,( \sigma ) 代表高斯分布的标准差,决定了高斯滤波器的平滑程度。标准差越大,图像中保留的细节越少,但去噪效果更好;反之,标准差越小,细节保留越多,去噪效果相对较弱。
高斯滤波的作用基于高斯函数具有各向同性和平滑性的特性,能有效去除图像中的噪声,同时保持边缘信息。其操作通常涉及与原图像进行卷积运算,输出图像中每个像素的值是原图像与高斯核进行卷积的结果。
2.1.2 高斯滤波在图像处理中的作用
在图像处理中,高斯滤波主要应用于图像预处理阶段,以减少图像噪声。这种类型的噪声可能是由于多种原因产生的,如图像采集设备的传感器噪声,或者是在图像传输过程中产生的信号干扰等。高斯滤波器的核矩阵(通常为二维矩阵)通过与原图像进行卷积操作,实现对图像的平滑处理。
高斯滤波的另一个重要作用是预备边缘检测算法的输入,因为在含有噪声的图像上直接进行边缘检测往往会得到较多的误报。通过高斯滤波预处理后的图像,可以降低错误检测边缘的概率,并且在一定程度上保留重要的图像边缘信息。
2.2 高斯滤波的实现过程
2.2.1 一维高斯滤波的实现
一维高斯滤波通常应用于信号处理领域,例如在时间序列数据的去噪上。在一维情况下,高斯函数简化为:
[ G(x) = \frac{1}{\sqrt{2\pi}\sigma} e^{-\frac{x^2}{2\sigma^2}} ]
在实际应用中,我们首先定义高斯核的大小和标准差。然后,基于这些参数,我们构建一个一维高斯核,它是一个关于中心对称的数组,数组中的每一个元素值都根据上述公式计算获得。
对于一维信号( S ),一维高斯滤波的实现过程可以表示为:
import numpy as np
def gaussian_filter_1d(signal, sigma):
size = np.max([np.ceil(3*sigma), 1])
size = size + 1 if size % 2 == 0 else size
x = np.arange(-size, size + 1, 1)
kernel = np.exp(-(x ** 2) / (2.0 * sigma ** 2))
kernel /= np.sum(kernel)
filtered_signal = np.convolve(signal, kernel, mode='same')
return filtered_signal
在这段代码中,我们首先定义了高斯核的大小,确保核的大小是奇数以便于中心对称,并且足够大以覆盖主要的高斯分布。然后,根据高斯分布函数计算出核的值,并将其归一化以确保滤波后的信号总和不变。最后,我们使用 numpy.convolve 函数将核与信号进行卷积操作。
2.2.2 二维高斯滤波的实现
二维高斯滤波在图像处理中更为常见,它对图像的每一行和每一列分别进行高斯滤波操作。二维高斯核的构建过程与一维类似,需要两个参数:宽度(height)和高度(width),以及标准差(sigma)。
def gaussian_filter_2d(image, sigma):
height, width = image.shape
x = np.arange(-3*sigma, 3*sigma, 1)
y = np.arange(-3*sigma, 3*sigma, 1)
xx, yy = np.meshgrid(x, y)
kernel = np.exp(-(xx**2 + yy**2) / (2*sigma**2))
kernel /= np.sum(kernel)
# Zero padding the image
pad_width = int(np.ceil(3*sigma))
padded_image = np.pad(image, ((pad_width, pad_width), (pad_width, pad_width)), 'constant', constant_values=(0, 0))
# Convolution
filtered_image = np.zeros_like(image)
for i in range(height):
for j in range(width):
filtered_image[i, j] = np.sum(kernel * padded_image[i:i+2*pad_width+1, j:j+2*pad_width+1])
return filtered_image
在这个二维高斯滤波的实现过程中,首先构建了一个二维高斯核,之后对图像进行了填充(padding),以确保滤波时核不会超出图像边缘。接着,通过双重循环将高斯核与填充后的图像进行卷积,最终得到滤波后的图像。
2.3 高斯滤波效果的评估与优化
2.3.1 滤波效果评估标准
高斯滤波效果的好坏,可以通过以下几种标准进行评估:
- 视觉效果 :这是最直观的评估方法,观察滤波后的图像是否变得平滑,且边缘是否得到保留。
- 信噪比(SNR) :信噪比是衡量信号质量的重要指标,它反映了信号中有效信息与噪声的比例。
- 均方误差(MSE) :均方误差是衡量两个图像差异的方法,比较原图与滤波后图像的像素值差异。
2.3.2 高斯滤波参数调整与优化技巧
高斯滤波的参数主要是核的大小和标准差( \sigma )。核的大小决定了滤波器的作用范围,通常核越大,去噪效果越好,但边缘信息丢失也越多。标准差( \sigma )决定了高斯曲线的宽窄,( \sigma )越大,平滑效果越强,图像模糊程度越高。
在进行图像处理时,参数的选择需要根据实际需求进行调整。对于边缘保留要求高的图像,可以使用较小的( \sigma )和核大小。相反,如果目标是最大化去噪效果,可以选择较大的( \sigma )和核大小。此外,还可以通过多尺度滤波方法,先用较大核进行粗略滤波,然后再用较小核进行精细滤波,以达到最佳效果。
3. 图像梯度强度和方向计算
3.1 图像梯度基础概念
3.1.1 图像梯度的定义与计算方法
在图像处理中,梯度是指图像强度值的变化率。直观上理解,梯度越大,表示图像中的亮度变化越剧烈。图像梯度通常用来表示边缘的方向和强度。
计算图像梯度最常用的方法是通过对图像进行卷积操作,这涉及到定义和应用不同的梯度算子。梯度算子是一组特定的二维核(Kernel),这些核对应于图像亮度的偏导数。
常见的梯度算子有Sobel、Prewitt、Roberts和Laplacian等。在实际应用中,Sobel算子因其在边缘检测方面的高效性而被广泛应用。
% Sobel算子的水平方向和垂直方向模板
sobelX = [-1 0 1; -2 0 2; -1 0 1];
sobelY = [1 2 1; 0 0 0; -1 -2 -1];
% 使用Matlab进行卷积操作,计算梯度
% 假设原始图像是灰度图像`img`
gradX = conv2(img, sobelX, 'same');
gradY = conv2(img, sobelY, 'same');
代码中 conv2 函数用于计算图像 img 与Sobel算子模板 sobelX 和 sobelY 的卷积。'same'参数表示输出图像大小与输入图像大小相同。
3.1.2 梯度算子的选择与应用
每种梯度算子都有其特点和适用场景。例如,Sobel算子比较适合检测水平或垂直边缘;Prewitt算子由于其简洁性,经常用于边缘检测的初步步骤;Roberts算子对噪声较为敏感,但其检测速度较快;Laplacian算子则对图像中的灰度变化非常敏感。
选择梯度算子时需要考虑的因素包括:
- 图像的清晰度和噪声水平
- 所需边缘的方向性
- 计算复杂度和实时处理要求
例如,若一幅图像噪声较多,可能更倾向于使用具有平滑特性的算子,如Gaussian-Laplacian算子组合。
3.2 梯度强度与方向的计算方法
3.2.1 Sobel算子的梯度计算
Sobel算子计算的是图像在x和y方向上的梯度。通过这两个方向的梯度,可以进一步计算出梯度的幅度(强度)和方向。
梯度的幅度(强度)计算公式为: [ G = \sqrt{G_x^2 + G_y^2} ]
梯度的方向可以使用反正切函数计算得到: [ \theta = \arctan\left(\frac{G_y}{G_x}\right) ]
其中,(G_x)和(G_y)分别是通过Sobel算子在x和y方向上计算得到的梯度图像。
% 计算梯度强度和方向
gradientMagnitude = sqrt(gradX.^2 + gradY.^2);
gradientDirection = atan2(gradY, gradX);
代码中计算了梯度的幅度和方向。 sqrt 函数计算幅度, atan2 函数计算方向。
3.2.2 其他梯度计算方法对比
除了Sobel算子之外,还有多种梯度计算方法。每种方法都有其优势和局限性。例如:
- Prewitt算子:与Sobel类似,但对边缘方向的选择更少。
- Roberts算子:使用小型的2x2算子,计算简单但对噪声敏感。
- Scharr算子:比Sobel算子更精确,适用于高精度的边缘检测。
- Canny算子:使用高斯滤波、非极大值抑制和双阈值跟踪,是一种综合边缘检测方法。
根据不同的图像特性和需求,选择最适合的梯度计算方法至关重要。
3.3 梯度计算的优化策略
3.3.1 计算效率提升方法
在实际应用中,为了提升梯度计算的效率,可以采取以下策略:
- 使用积分图像:积分图像可以快速计算区域内的像素总和,从而加快Sobel算子等的计算。
- 并行处理:利用现代多核处理器或GPU,可以对图像的不同区域同时进行梯度计算。
- 优化算子:创建自定义的算子,针对特定问题进行优化,以减少计算量。
% 使用Matlab内置函数进行梯度计算的高效示例
[gradX, gradY] = imgradientxy(img, 'sobel');
在Matlab中, imgradientxy 函数可以直接计算图像的梯度。
3.3.2 梯度噪声抑制技术
梯度计算往往伴随着噪声的放大,因此需要采取措施抑制噪声:
- 使用高斯滤波进行预处理,以平滑图像。
- 应用中值滤波等非线性滤波器,保留边缘的同时减少噪声。
- 使用自适应阈值方法,根据不同图像区域的噪声特性动态调整阈值。
% 在计算梯度前应用高斯滤波去噪
imgGaussian = imgaussfilt(img, sigma); % sigma是高斯核的标准差
gradX = conv2(imgGaussian, sobelX, 'same');
gradY = conv2(imgGaussian, sobelY, 'same');
代码中 imgaussfilt 函数用于对图像应用高斯滤波。调整 sigma 值可以改变滤波的程度。
梯度强度和方向的计算是图像边缘检测的核心部分,优化这些计算对于提升边缘检测的质量和效率至关重要。接下来的章节将探讨如何通过非极大值抑制进一步细化边缘检测结果。
4. 非极大值抑制步骤
非极大值抑制(Non-Maximum Suppression, NMS)是Canny边缘检测算法中的关键步骤之一,其作用是细化边缘,并且去除图像中由于梯度运算产生的非边缘点。接下来,我们将深入探讨非极大值抑制的原理、实现以及在边缘检测中的优化和应用。
4.1 非极大值抑制的原理
4.1.1 非极大值抑制的定义
非极大值抑制,顾名思义,是一种用于选择局部最大值的方法,目的是确定边缘像素点是否为该邻域内的最大梯度点。其工作原理是沿梯度方向进行局部极大值检测,如果一个像素点不是局部极大值点,那么它将被抑制,以此来去除多余的边缘点。
4.1.2 抑制过程中的边缘保留机制
在边缘检测过程中,非极大值抑制通过比较每个像素点与其梯度方向上的邻域点来保留局部最大梯度点。具体来说,如果一个像素点的梯度强度大于其在梯度方向上相邻的两个点,则该点被保留为边缘点,否则被抑制。这个机制确保了边缘的连续性和精细度。
4.2 非极大值抑制的实现
4.2.1 线性扫描法的非极大值抑制
线性扫描法是一种简单的非极大值抑制实现方式。基本思想是对图像中的每个像素点进行遍历,计算该点与边缘方向上两个相邻点的梯度强度,比较三者之间的大小关系,从而判断该点是否为局部极大值点。
def non_max_suppression(image, gradient_magnitude, gradient_direction):
suppressed_image = np.zeros_like(image)
directions = np.uint8(gradient_direction / (np.pi / 4))
for i in range(1, image.shape[0] - 1):
for j in range(1, image.shape[1] - 1):
# 计算当前点的梯度方向
angle = directions[i, j]
# 获取梯度方向上的邻近点强度
q = gradient_magnitude[i, j - 1]
r = gradient_magnitude[i, j + 1]
# 根据梯度方向判断邻近点的位置
if (angle == 0) or (angle == 1):
s = gradient_magnitude[i + 1, j]
if gradient_magnitude[i, j] > q and gradient_magnitude[i, j] > r:
suppressed_image[i, j] = gradient_magnitude[i, j]
# ... 其他方向的判断逻辑省略
return suppressed_image
4.2.2 八邻域非极大值抑制技术
八邻域非极大值抑制是对线性扫描法的扩展,它考虑了像素点周围的八个邻域点。这种方法可以在更广泛的区域内找到局部极大值,有助于获得更准确的边缘检测结果。
4.3 非极大值抑制的优化与应用
4.3.1 非极大值抑制的性能优化
非极大值抑制的优化可以通过减少不必要的计算来提升性能。例如,可以使用快速查找表来替代复杂的数学运算,或者并行化计算过程来加速处理速度。此外,根据应用场景的需求,还可以选择合适的数据类型来存储中间结果,以减少内存消耗。
4.3.2 在边缘检测中的实际应用案例
在实际的边缘检测应用中,非极大值抑制是连接前一阶段检测到的边缘点的重要步骤。以下是使用非极大值抑制的边缘检测的示例代码。
% 假设已经计算出图像的梯度强度gradient_magnitude和梯度方向gradient_direction
% 使用非极大值抑制函数
nms_image = non_max_suppression(image, gradient_magnitude, gradient_direction);
% 可视化非极大值抑制后的结果
figure, imshow(nms_image, []), title('Non-maximum suppression');
非极大值抑制的实施不仅提高了边缘检测的精度,而且在实际项目中,如医学图像分析、视频监控等领域,都发挥了重要的作用。通过不断优化算法和调整参数,非极大值抑制正逐步发展为更加高效和鲁棒的边缘检测工具。
5. 双阈值边缘检测方法
5.1 双阈值检测的理论基础
5.1.1 双阈值检测的原理与目的
双阈值检测是Canny边缘检测算法中用于确定边缘点是否显著的重要步骤。该方法依据边缘强度的不同,将边缘划分为强边缘和弱边缘两个类别。强边缘通常对应于图像中的主要轮廓,而弱边缘则可能对应于噪声或者不那么显著的特征。双阈值检测的原理是定义两个阈值,高阈值用于确定强边缘点,低阈值用于连接强边缘周围可能属于同一边缘线的弱边缘点。
该方法的主要目的是提高检测的准确性,减少误报和漏报。通过双阈值机制,算法能够保留那些确实能够代表真实边缘的像素点,同时去除孤立的噪声点。这一步骤在避免虚假边缘的同时,也保持了边缘的完整性。
5.1.2 阈值设定对检测结果的影响
阈值的选择对边缘检测结果的影响至关重要。过高阈值会导致边缘信息的丢失,尤其是弱边缘可能被忽略,造成边缘断裂;而过低阈值又会导致大量的非边缘像素点被误判为边缘点,增加噪声的影响,降低边缘检测的准确性。
因此,阈值的设定需要根据实际图像的特性和噪声水平来调整。在实际应用中,通常采用自适应的方法或者基于图像统计特性的方式来确定合适的阈值。
5.2 双阈值检测的实现步骤
5.2.1 阈值的确定方法
确定阈值的方法多种多样,可以从图像的直方图、梯度幅值分布或其他统计信息中获取线索。一种常见的方法是利用梯度幅值的分布确定阈值。首先计算图像所有像素点的梯度幅值,绘制其直方图。根据直方图的分布特征,可以找到分隔强弱边缘的两个阈值点。
此外,还可以根据先验知识或者经验来设定阈值,例如在某些特定应用中,人们可能事先知道边缘的大概强度范围,从而直接设置阈值。
5.2.2 边缘点的标记与跟踪
在确定了双阈值之后,接下来的步骤是标记和跟踪边缘点。这一步骤通常包括以下步骤:
- 对于每个像素点,如果其梯度幅值大于高阈值,则将其标记为强边缘点。
- 对于梯度幅值小于高阈值但大于低阈值的像素点,检查其与强边缘点的连通性。如果存在连通路径,则将其标记为弱边缘点。
- 通过跟踪连通路径,可以将分离的弱边缘点连接成连续的边缘线。
这个过程往往需要利用图论中的连通组件分析方法,确保边缘线的连贯性和完整性。
5.3 双阈值检测的改进策略
5.3.1 阈值自适应调整技术
由于图像内容和噪声水平的不同,固定的阈值很难适应所有情况。因此,自适应阈值调整技术被提出来改进双阈值检测方法。这种方法的基本思想是根据图像的局部特征来动态调整阈值。例如,可以基于局部像素强度的统计信息来调整阈值,使算法更加灵活和鲁棒。
5.3.2 双阈值检测的缺陷与解决方案
尽管双阈值检测比单阈值方法具有更好的性能,但它仍然有一些缺陷。例如,在高噪声环境下,强弱边缘的判别可能仍然不准确,导致边缘断裂或连接不畅。针对这个问题,可以考虑将双阈值检测与其他边缘增强技术结合使用,如在阈值处理前先应用一些噪声抑制方法。
此外,还可以通过机器学习和人工智能技术来预测和优化阈值设定,从而进一步提升边缘检测的准确性。这可能涉及对大量图像数据的训练,以学习在各种条件下合适的阈值参数。
6. 后处理步骤连接边缘
6.1 连接边缘的原理与方法
6.1.1 边缘连接的定义和重要性
边缘连接是在边缘检测之后的图像处理步骤,目的是为了构建边缘间的连续路径,以便更准确地识别图像中的物体轮廓。边缘检测可能会产生断断续续的边缘片段,而通过边缘连接,可以将这些片段连成完整的边界。这种方法在处理复杂图像时尤为重要,因为它们能够有效地去除背景噪声,并突出图像中目标物体的边缘。
6.1.2 连接算法的选择标准
边缘连接算法的选择对最终结果的准确性有直接影响。选择连接算法时,应考虑以下标准:
- 准确性: 算法应能准确区分图像中物体的边缘,并有效地将间断边缘连接起来。
- 鲁棒性: 算法需要对抗噪声和光照变化,保证边缘连接的可靠性。
- 效率: 处理时间应尽量缩短,以满足实时图像处理的需求。
6.2 连接边缘的实现技术
6.2.1 跟踪与连接的策略
边缘跟踪与连接是将边缘检测得到的点序列或边缘片段进行组织,形成封闭的轮廓或边缘路径。常用的策略包括:
- 局部邻域搜索: 从边缘检测的结果出发,以当前点为基础,在其邻域内搜索与之连接性最强的点。
- 动态规划: 通过构建成本函数来优化边缘路径的选择,以获得全局最优的连接路径。
- 图论方法: 将边缘片段视为图中的节点,利用图论中的最短路径算法来找到最佳的连接路径。
# 示例代码:使用动态规划进行边缘连接
import numpy as np
# 假设edge_points是一个包含边缘点坐标的数组
def connect_edges(edge_points):
# 动态规划求解最短路径
n = len(edge_points)
# 计算连接成本,此处仅为示例,实际需要根据图像特性定义
costs = np.random.rand(n, n)
# 初始化动态规划表
dp = np.zeros((n, n))
# 动态规划过程
for i in range(n):
for j in range(n):
if i != j:
dp[i][j] = costs[i][j] + min(dp[i][:j] + dp[j][:i])
return edge_points[np.argmin(dp[-1])] # 返回最小成本路径的最后一个点
# 示例中使用随机数模拟成本计算,并返回最终连接点
6.2.2 连接算法的优化与加速
为了提高边缘连接的效率,可以通过以下方法进行优化:
- 多分辨率方法: 在不同的分辨率级别上进行边缘连接,先连接大尺度上的边缘,再逐渐细化到小尺度。
- 并行计算: 利用现代处理器的多核优势,对边缘片段的连接过程进行并行化处理。
- 启发式搜索: 引入启发式规则,限制搜索范围,减少不必要的计算。
6.3 连接边缘的评估与应用
6.3.1 连接效果的评估指标
边缘连接效果的评估通常基于以下指标:
- 连续性: 边缘连接后是否能够形成连续的边界。
- 完整性: 连接后的边缘是否完整地表示了物体的形状。
- 准确率: 连接后的边缘与实际物体边缘的一致程度。
6.3.2 在实际图像处理中的应用
在实际应用中,边缘连接技术广泛应用于图像分割、物体识别、目标跟踪等领域。以医学图像处理为例,边缘连接有助于识别和区分不同的组织结构,从而辅助医生进行更准确的诊断。在自动驾驶汽车中,边缘连接技术能够帮助识别道路标志和障碍物,提高行驶安全。
在开发边缘连接算法时,结合具体应用场景的需求是至关重要的,它将指导算法设计和性能优化的方向。例如,在高速动态环境下,边缘连接算法就需要特别强调实时性和鲁棒性。而在分析静态图像数据时,则可以更关注连接的准确性和完整性。通过不断迭代和优化,边缘连接技术将在众多领域发挥更大的作用。
7. Canny滤波器在Matlab中的应用
7.1 Matlab环境下的Canny滤波器实现
Matlab提供了一个强大的图像处理工具箱,其中包括Canny边缘检测算法的直接实现。在Matlab中使用Canny滤波器,开发者可以非常容易地对图像进行边缘检测,并在后续处理中进一步分析这些边缘。
7.1.1 Matlab中Canny函数的使用方法
Matlab中的 edge 函数提供了Canny边缘检测的功能。其基本用法如下:
BW = edge(I, 'canny');
在这里, I 是输入的灰度图像, BW 是输出的二值边缘图像。 edge 函数默认使用Canny算法,它将自动计算高斯滤波器的标准差、双阈值以及连接边缘的规则。
参数说明: - 'canny' :明确指定使用Canny算法。 - I :待检测的灰度图像。 - BW :通过Canny算法处理后的二值图像。
7.1.2 调用Canny滤波器的代码实例
下面是一个使用Matlab中Canny滤波器进行边缘检测的完整示例:
I = imread('example.jpg'); % 读取原始图像
I_gray = rgb2gray(I); % 转换为灰度图像
BW = edge(I_gray, 'canny'); % 应用Canny算法
imshow(BW); % 显示二值边缘图像
在上述代码中,首先通过 imread 函数读取一幅彩色图像,并使用 rgb2gray 函数将其转换为灰度图像。随后,使用 edge 函数并指定算法为'Canny',对灰度图像进行边缘检测。最后,通过 imshow 函数显示检测到的边缘。
7.2 Matlab中的Canny算法优化
Matlab的Canny边缘检测功能默认参数对于许多图像来说已经足够好,但为了得到更精确的结果,我们可以通过调整参数来优化算法。
7.2.1 参数调整对结果的影响
Matlab中 edge 函数的Canny算法有几个可调节的参数:
BW = edge(I_gray, 'canny', sigma, low_threshold, high_threshold);
-
sigma:高斯滤波的标准差。它控制着滤波器的平滑度,影响边缘检测的灵敏度。 -
low_threshold:低阈值参数,用于边缘连接。 -
high_threshold:高阈值参数,用于边缘检测的初始阈值。
调整这些参数可以控制边缘检测的细节程度和边缘保留的程度。通常,较低的阈值会保留更多的边缘信息,但也可能引入更多的噪声。
7.2.2 Matlab代码的性能优化技巧
为了进一步提升性能和检测质量,可以使用一些性能优化技巧:
- 预处理:在调用Canny算法前,可以先进行图像平滑处理,如使用
imfilter或imgaussfilt函数对图像进行高斯模糊。 - 多尺度分析:对于特别复杂的图像,可以使用多尺度方法进行边缘检测,并结合不同尺度的结果。
- 并行计算:利用Matlab的并行计算工具箱来加速边缘检测过程,尤其是在处理大型图像或者需要大量参数调整的情况下。
7.3 Canny滤波器的高级应用与案例分析
Canny滤波器不仅仅局限于简单的边缘检测任务,它还可以被应用于更复杂的图像处理场景。
7.3.1 多种滤波器效果的比较分析
在Matlab中,除了Canny滤波器外,还可以使用其他边缘检测方法,如 Sobel 、 Prewitt 、 Roberts 等。通过对比这些方法的边缘检测效果,可以更好地了解Canny滤波器的优势:
-
Canny:具有良好的边缘定位精度和低错误率。 -
Sobel:容易实现,边缘定位精度较低,对于噪声较为敏感。 -
Prewitt:与Sobel类似,但是对边缘的检测更平滑。 -
Roberts:边缘定位精度高,但是对噪声非常敏感。
7.3.2 实际案例中的Canny滤波器应用
Canny滤波器的实际应用非常广泛,包括但不限于医学图像分析、卫星图像处理、工业缺陷检测等。在实际应用中,Canny算法通常与图像分割、特征提取、模式识别等技术结合使用,以实现复杂的图像分析任务。举个例子,在医疗领域,Canny滤波器可用于检测肿瘤的轮廓,而在制造业中,它可用于识别产品的缺陷。
简介:Canny边缘检测算法是计算机视觉中用于提取图像清晰边缘的重要技术。通过使用高斯滤波去除噪声、计算梯度强度和方向来标识边缘、应用非极大值抑制消除虚假边缘、双阈值检测以确保边缘连续性和稳定性,并通过后处理步骤连接边缘,最终使用Matlab中的 edge 函数实现边缘检测。Canny滤波器广泛应用于机器人导航、自动驾驶和医学影像分析等领域。

















 3377
3377

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









