



 脉冲选择器(PulsePicker)是一种电控光学开关,用于从脉冲序列中提取单个或多个所需脉冲。本文介绍其工作原理,包括电光调制器(EOM)与声光调制器(AOM)两种类型,并列举了多项应用场景,如光脉冲能量放大、材料加热等。
脉冲选择器(PulsePicker)是一种电控光学开关,用于从脉冲序列中提取单个或多个所需脉冲。本文介绍其工作原理,包括电光调制器(EOM)与声光调制器(AOM)两种类型,并列举了多项应用场景,如光脉冲能量放大、材料加热等。
脉冲选择器/Pulse Picker简介
脉冲选择器/Pulse Picker是一种电控光学开关,用于从快速脉冲序列中提取单个/所需的多个脉冲。
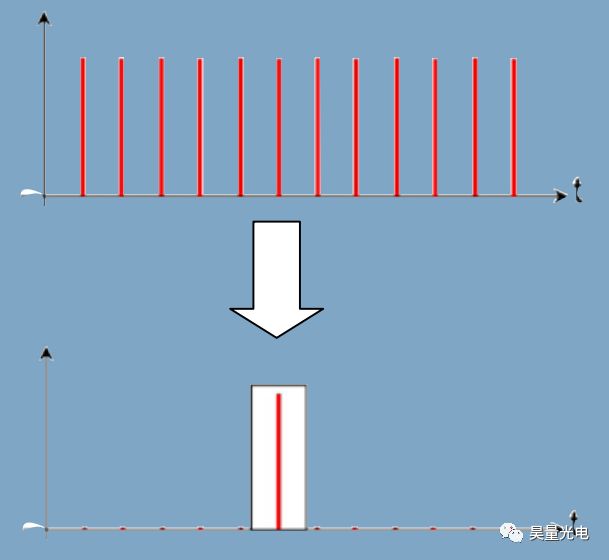
在大多数情况下,短脉冲和超短脉冲是由锁模激光器以脉冲序列的形式产生,其脉冲序列的重复率在10MHz到几GHz之间。
由于各种原因,通常需要从这样的脉冲序列中选取某种脉冲。例如,只发送我们想要的脉冲而将其他所有脉冲剔除掉。这种需求便可以通过脉冲选择器/Pulse Picker来完成,而脉冲选择器/Pulse Picker本质就是一个电控光闸。
脉冲选择器/Pulse Picker类型
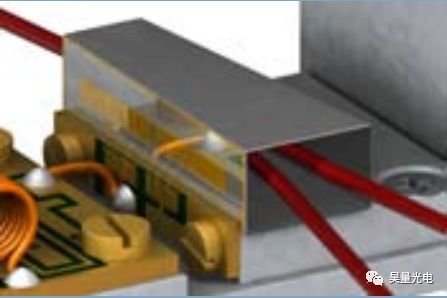
在大多数情况下,脉冲选择器/Pulse Picker(电控关闸)可以是电光调制器也可以是声光调制器,外加相应的驱动器。
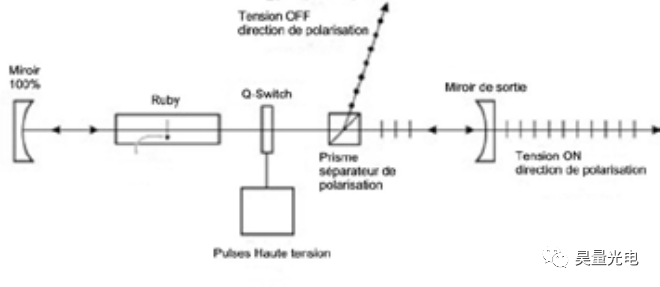
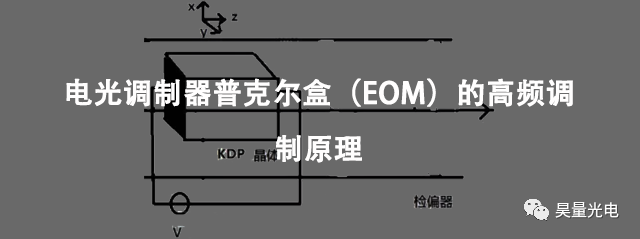
EOM:对于电光设备,脉冲选择器/Pulse Picker由普克尔斯盒(EOM,Pockels)和一些偏振光学器件组成;普克尔斯盒控制光束偏振态,偏振器件根据光束的偏振态决定此刻光束是通过还是阻挡。
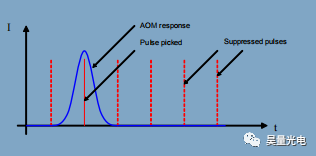
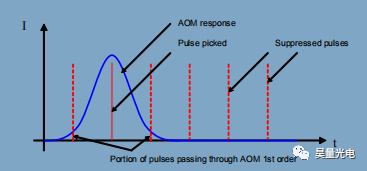
AOM:声光脉冲选择器/Pulse Picker的原理是向声光调制器施加一个短的RF脉冲,以将所需的脉冲偏转到指定的方向。使得偏转的脉冲可以通过一个孔,而其他的则被阻挡掉。
在任何情况下,调制器的所需速度都取决于脉冲序列中脉冲的距离(例如,取决于脉冲源的脉冲重复率),而并非脉冲持续的时间。

EOM是一种快速、通用的解决方案,但是EOM需要高压驱动,由于高压切换速度的局限性,因此通常不能应用于高重复率的需求。而这种情况,尽管AOM速度较慢,但是在MHz以上的重复率,表现出较好的性能。
不过一些横向电光调制器(美国Conoptics 25D)通过改变电压在晶体上的施加方式,可以使得电光调制器用于25-30Mhz 的脉冲选择。
脉冲选择器/Pulse Picker应用
▶ 光脉冲能量放大
为了在超短脉冲中获得高能量得脉冲,经常需要降低脉冲的重复率。那么可以在种子激光器与放大器之间放一个脉冲选择器/Pulse Picker。那么通过脉冲选择器后的脉冲就是我们所需的脉冲。脉冲选择前的脉冲与脉冲选择后的脉冲能量相差并不大;并且选择后的脉冲足以使后端的放大器正常工作,进一步实现功率放大。
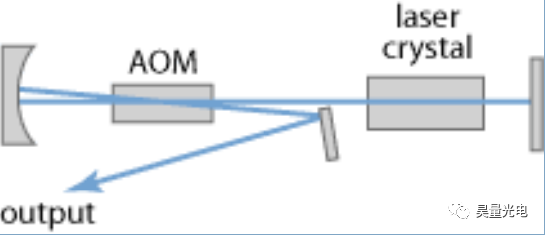
▶ cavity-dumped laser
在cavity-dumped laser中,脉冲选择器/Pulse Picker(通常称为cavity dumper)仅在第N次往返中从腔体中提取循环脉冲。在所有其他往返光程中,脉冲的光损耗低,并且可以放大为高能量。
▶ 再生放大系统
再生放大系统中,受限于放大光路的响应时间和能量需求,对入射的脉冲个数有一定要求,所以需要对入射的激光脉冲个数按需要进行控制/操作。一般该应用中,因为入射光/放大过程中能量较高,对选择器孔径要求较大(>5-10mm,甚至20-50mm或者更大),频率一般再100Khz以下。
▶ 材料加热/光与物质相互作用
一些材料分析实验中,需要研究单个fs脉冲光与物质相互作用,此时需要从Mhz,甚至几十Mhz飞秒激光脉冲中,选出单脉冲光。
▶ 五维信息存储
由南安普顿等院校研究的为五维信息储存技术,利用光的不同特性作用与物质,可以高容量,持久保存写入需要的信息,实现长久,大量存储功能。该应用需要的对入射光的脉冲个数,偏振进行调制需求,可以由电光调制器很好完成(美国Conoptics)。
▶ TDTR时域热反射测量法
time-domain thermoreflectance
该应用中,为了得到物质热学传递特定的高速描述,需要对入射的脉冲/连续光进行8-10Mhz频率调制,并配套解调系统,得到高时间分辨率的热学传递特性,对于fs激光的波长可调特性,需要配套调制器/脉冲选择器的A宽谱工作选项(25D+M350-160,400-800nm/ 700-1100 nm)。
如何选择脉冲选择器/Pulse Picker
考虑的主要指标有以下几点:
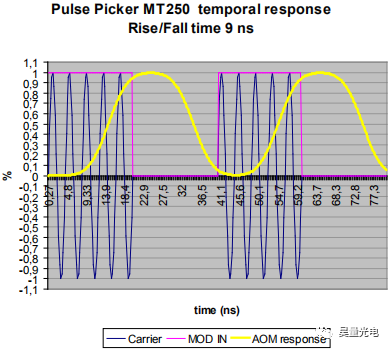
1. 开关时间(特别是对于高输入脉冲重复率的光源)或上升/下降时间
对于基于AOM脉冲选择器/Pulse Picker,上升/下降时间与声光调制器的孔径有关。我们定义上升/下降时间指的是传递时间曲线10%-90%经历部分。如果要得到快速的上升/下降的时间,光束直径在AOM内被聚焦到10um以下。
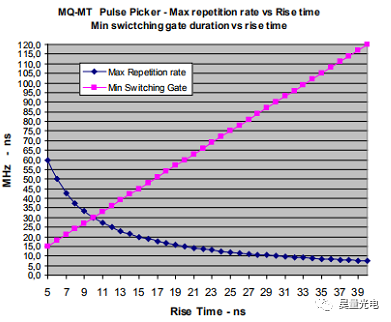
2. 开关的最大重复率
对于AOM来说,这个参数和上升下降时间直接相关,然而AOM内部的平均射频功率也是另一个限制,高重复率将引起AOM过热而不得不使用水冷系统。
3. 光脉冲的能量损耗
能量损耗主要由AOM器件的衍射效率以及光纤和光纤耦合造成的损耗,对于大多数AOM脉冲选择器/Pulse Picker来说,损耗将达到75%-90%。
4. 精确选择脉冲的能力
它与AOM及配套射频驱动系统的消光比有关,大多数情况下,动态消光比作为最主要的因素,例如AOM的下降时间不够快,下一个(或上一个)脉冲的一部分也通过选取的范围。
5. 脉冲选择器/Pulse Picker波长适用范围(特别是对于可调谐飞秒激光器)
输出一阶角与波长成正比。如果入射光束的线宽由于超短脉冲而变宽,则会导致输出一阶角的展宽。另一方面,AOM本身的透过率曲线及镀膜曲线也会影响波长适用范围。
6. 色散(特别是对于脉宽<<100fs的宽带脉冲)
介质性质决定了在不同波长下光速是不同的,输入的光谱越宽,脉冲的色散效应越高。这种效应在高折射率晶体中更为敏感,比如Teo2比熔石英更为明显。
7. 有效通光孔径的大小
为了获得最好的效果,激光束需要和有效孔径匹配,有效孔径与脉冲上升下降时间有关,这与声光效应的原理有光。
8. 外部尺寸/散热
由于脉冲选择器/Pulse Picker的占空比通常很低(<< 1%ON),因此AOM内部的平均RF功率很低,因此我们可以拥有基于TeO2或基于熔融硅的高效率的风冷脉冲选择器/Pulse Picker;然而,由于SiO2材料的细度低,所需的RF峰值功率将比TeO2高得多。
9. 一般材料的损伤阈值
选择TeO2脉冲选择器/Pulse Picker是因为它具有较低的驱动射频功率,而选择SiO2脉冲选择器/Pulse Picker是因为其更高的损伤阈值。
TeO2 (Typ 100W/mm², <30 MW/cm² with ns pulses @1µm)
SiO2 (Typ > 1GW/cm² with ns pulses @1µm)

— 查看更多相关产品 —



微信在线客服
点“阅读原文”了解更多

















 645
645

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









